ログイン
会員登録
スポーツロボット
書いてみる
関連タグ
#研究 (35,318)
#ロボット (14,514)
#テクノロジー (29,360)
#スポーツ (88,944)
#とは (59,034)
#技術 (15,944)
人気
急上昇
新着
定番
有料のみ
28件
人気の記事一覧
私の作るスポーツロボット
田中一敏
3年前
5
スポーツロボットとは
田中一敏
5年前
29
RSJ OS スポーツロボット
田中一敏
5年前
4
剣道エージェント
田中一敏
5年前
17
ソフトロボット
田中一敏
5年前
8
古武術ロボット
田中一敏
5年前
20
スポーツロボットのサイズ
田中一敏
5年前
13
スポーツとデータ
田中一敏
5年前
18
水泳ロボット
田中一敏
5年前
6
脚式ロボットの全身運動制御
田中一敏
5年前
12
田中一敏・スポーツロボット研究者
田中一敏
5年前
12
人間行動の予測
田中一敏
5年前
12
スポーツロボットの先にあるもの
田中一敏
5年前
8
スポーツロボットの作り方
田中一敏
5年前
7
跳躍打撃動作を行うヒト型ロボットのアクチュエータ
田中一敏
5年前
14
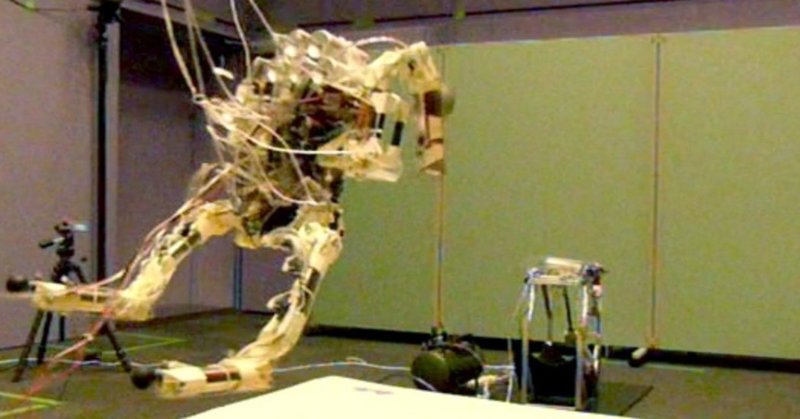
走行する脚式ロボット
田中一敏
5年前
7
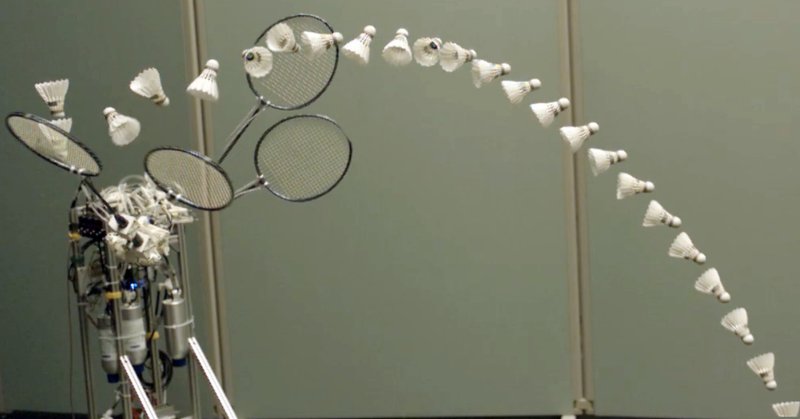
バドミントンをするヒト型ロボットアーム
田中一敏
5年前
10
飛ぶ物体を掴むロボット
田中一敏
5年前
8
ゲームとスポーツとロボット
田中一敏
5年前
12
スポーツロボット関連書籍
田中一敏
5年前
17
人間の能力を高めるスポーツロボット
田中一敏
5年前
9
卓球ロボット
田中一敏
5年前
7
人を楽しませるスポーツロボット
田中一敏
5年前
15
俊敏な空気圧ロボット
田中一敏
5年前
6
高速視覚系を有する高速ロボット
田中一敏
5年前
6
バレーボールロボット
田中一敏
5年前
5
人を知るためのスポーツロボット
田中一敏
5年前
6
スポーツロボット
田中一敏
5年前
5