跳躍打撃動作を行うヒト型ロボットのアクチュエータ

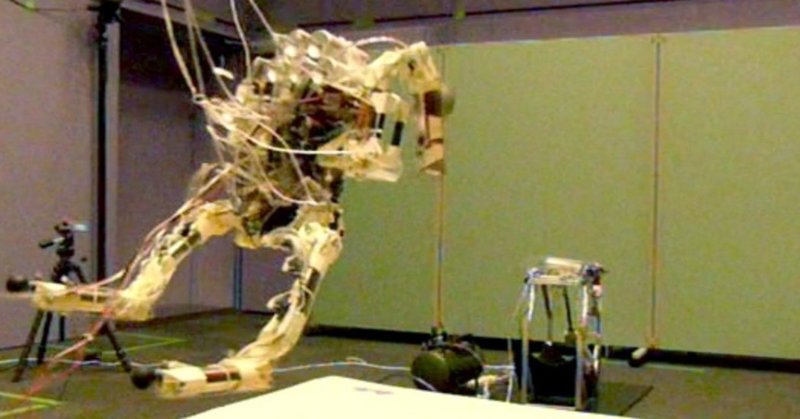
バレーボールのフライングレシーブのように、向かってくるボールを跳んで打つロボットを開発しました。そのロボットのために開発したアクチュエータについて簡単に説明します。
問題意識
スポーツ動作を行うロボットは多くあります。しかし、人間のように二本の足で立つロボットはほとんどない。全身で反応するヒト型のスポーツロボットはどうすれば作れるか、という問題に取り組みました。
跳躍打撃動作の問題設定
ロボットの近くにボールが飛んできます。ロボットはボールが来ることを知っていますが、いつ、どこから、どこへ、どのようにボールが飛ぶかを知りません。ロボットはボールを見つけ、軌道を予測して、跳躍し、空中でボールを打ちます。
設計の課題
跳躍打撃動作を行うロボットには、小さく、軽く、大きな力と速度を出すアクチュエータ(力を出す装置)が必要でした。そこで、そのようなアクチュエータを開発しました。
構造一体型空気圧ケーブルシリンダ
開発したアクチュエータは構造一体型空気圧ケーブルシリンダと呼びます。上の動画に説明があります。シリンダが関節をつないでいるため、本来そのために使う部品を節約して軽くなっています。ケーブルを使うことで、よく使われるロッドシリンダよりも軽くなり、コンパクトな設計が可能になりました。1つのシリンダで1つの関節を両方向に動かせます。3Dプリンタで造形した部品を使って軽量化しました。シリンダに出入りする空気の動きとロボットの動きをシミュレーションして、最適な設計を調べました。シリンダを使ってロボットを作り、ロボットが跳躍打撃動作の動きを行えることを確認しました。
その後
この研究では、ロボットは事前に決められた動きをしていました。その後、空気圧ケーブルシリンダを備えたヒト型ロボットが、ボールに応じて違う跳躍打撃動作を行う方法を開発しました。