マガジン

ドローンデリバリーの世界

Iwahori Toshiki
- 20本
エコでクリーンなドローンデリバリー(drone delivery)。ドローンデリバリーまたはドローン宅配、あるいはドローン配達、ドローン配送、ドローン輸送、ドローン運搬、ドローン搬送など環境負担(環境負荷)低減に貢献するエコでクリーンなドローン物流の可能性

医療物資のドローン物流
Iwahori Toshiki
- 10本
コロナ禍で加速したドローンによる医療サプライチェーン変革。離島や僻地だけでなく人口密集地である都市の上空を飛行し、ワクチンや検体、移植用臓器など医療物資を搬送するドローンデリバリー(medical drone delivery)の可能性



最近の記事
- 固定された記事





- 固定された記事



マガジン
記事
 再生
再生【ドローンダンス】ChatGPTでドローンショー振付
ミュンヘン工科大学(Technical University of Munich)などの研究者らは大規模言語モデル(LLM)「ChatGPT」でドローンショー(ドローンダンス)の振付ができる「Swarm-GPT」を開発した。 音楽に合わせた複数機からなる群ドローン(drone swarm)のフォーメーション飛行によるエンタテインメントは「ドローンダンス」(drone dance)と呼称される。 近年、日本ではドローンライトショー(drone light show)のことを「ドローンショー」(drone show)と言っているケースが多々見られるが、本来的にはドローンショーといえばドローンダンス系のエンタテインメントショーのことを指す。 因みに、ドローンを使用したライトショー、つまり「ドローンライトショー」は「ドローンアニメーション」(drone animation)あるいは「ドローンディスプレイ」(drone display)または「ドローンライトインスタレーション」(drone light installation)と呼称・分類される。 衝突回避の安全フィルターに外部センサーを使用してはいるものの、AIをインターフェースとして群ドローン飛行の振付を言葉で指示・指定できるようにする取り組みは興味深い。 ■『TUM professor uses ChatGPT for choreographies with flying robots』 https://www.tum.de/en/news-and-events/all-news/press-releases/details/tum-professor-uses-chatgpt-for-choreographies-with-flying-robots Prof. Angela Schoellig from the Technical University of Munich (TUM) uses ChatGPT to develop choreographies for swarms of drones to perform along to music. An additional safety filter prevents mid-air collisions. The researchers' results demonstrate for the first time that large language models (LLMs) such as ChatGPT can be used in robotics. ☑️「Swarm-GPT: Combining Large Language Models with Safe Motion Planning for Robot Choreography Design」 Aoran Jiao, Tanmay P. Patel, Sanjmi Khurana, Anna-Mariya Korol, Lukas Brunke, Vivek K. Adajania, Utku Culha, Siqi Zhou, Angela P. Schoellig NeurIPS 2023 workshop paper https://doi.org/10.48550/arXiv.2312.01059 ☑️「AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms in Cluttered Environments」 Vivek K. Adajania; Siqi Zhou; Arun Kumar Singh; Angela P. Schoellig 2023 IEEE International Conference on Robotics and Automation (ICRA) DOI: 10.1109/ICRA48891.2023.10161063
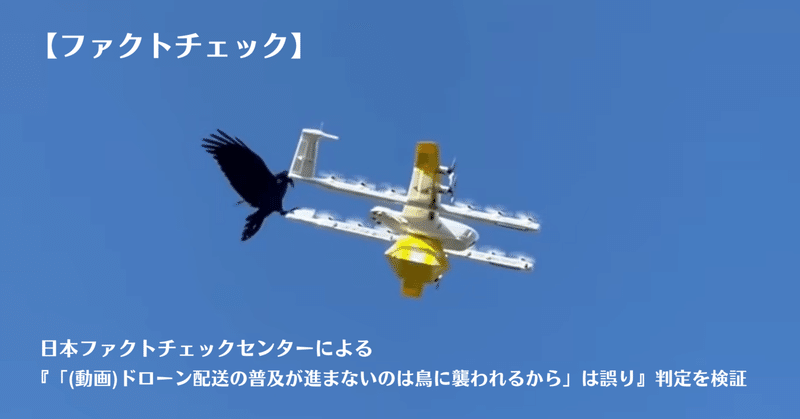
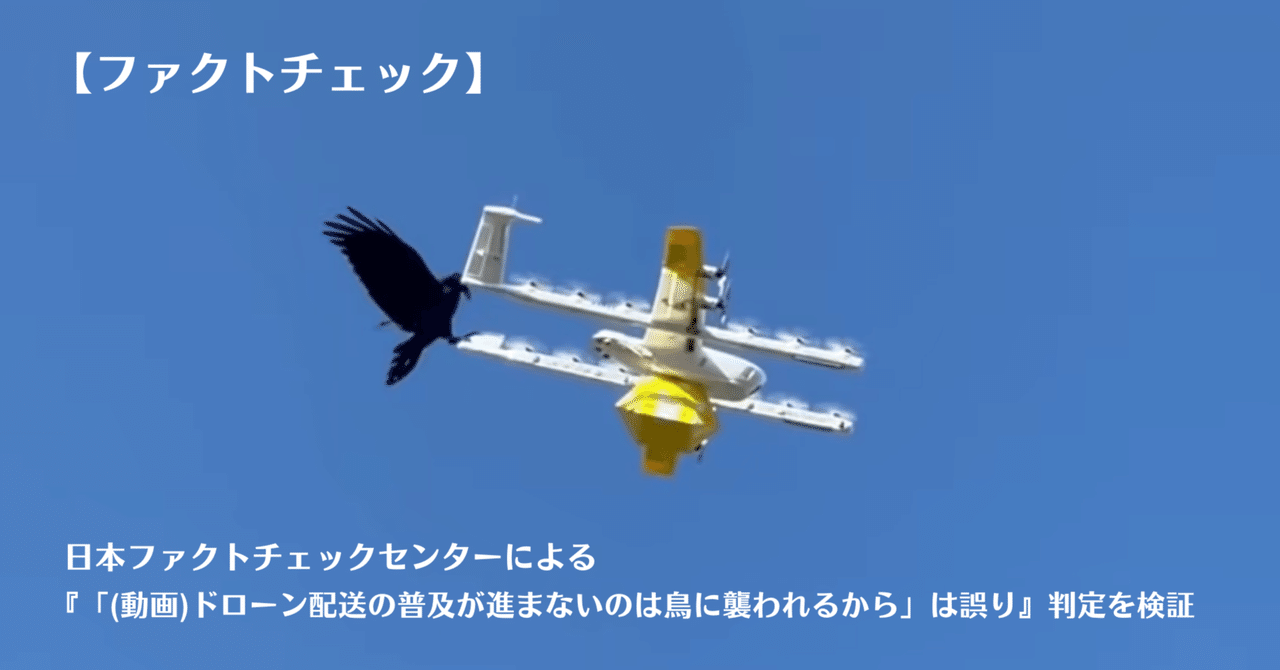
【ファクトチェック】日本ファクトチェックセンターによる『「(動画)ドローン配送の普及が進まないのは鳥に襲われるから」は誤り』判定を検証
日本では新聞やテレビはもちろんドローン専門メディアにさえドローンに関する不正確あるいは不適切なミスリード記事(報道)が氾濫しています。その中の一部には風評被害に繋がるものも存在します。 ドローン専門メディアの編集長から記事に間違いがあったら教えてくださいと社交辞令の挨拶は受けていますが、現状あまりにも誤りが散見されるため極力見ないようにしているのがドローン後進国であり衰退途上国でもある日本の現状です。 もちろん、たまたま目に入ってしまった不正確あるいは不適切なドローン関連
 再生
再生【ハイブリッドドローン】最大7時間飛行、可搬重量45kg「Firefly」
ハイブリッドマルチローター(マルチコプター)ドローンの最長連続飛行時間記録はアメリカSkyfront社が13時間4分、スペインQuaternium社が10時間14分と海外ドローンメーカーは軒並み10時間を超えてきたが、アメリカParallel Flight Technologies社のハイブリッドマルチロータードローン(UAV)「Firefly」は最大ペイロード100ポンド(45kg)ながら最大飛行時間7時間オーバー(最大ペイロード45kg積載時は2時間以上)と特異な特徴を持つヘビーリフトPHEMドローン。 山火事防止や森林火災消火活動など災害現場での活躍が期待されており、USDAから助成を受け、Grayback Forestry社などとも提携している。 以前の記事『【韓国】水素燃料電池ドローンなどゼロエミッションで世界をリード』で触れた通り、マルチコプターの推進(駆動)方式としてハイブリッドは最大飛行時間と最大航続距離が一般的にエンジン(内燃機関)、水素燃料電池、バッテリー電動ドローンより長いのが特徴である。現状のテクノロジーイメージとしては「ハイブリッド≧エンジン>水素燃料電池>バッテリー」となる。 ハイブリッドはバッテリーが使用できなくなる過酷な環境下でも作動するので、ハイブリッドマルチロータードローンは砕氷船などに搭載され、北極や南極調査で使用されることも多い。最大ペイロード10kg(5kg積載時でも2時間飛行可能)なフィンランドAvartek Drones社の「Boxer Hybrid Drone」はその代表と言える。 惜しむらくは海外ハイブリッドマルチロータードローンに対抗できる技術力を有する日本企業が存在しないこと。エンジン(マルチコプター)ドローンのアラセ・アイザワ・アエロスパシアル合同会社あたりが新たにハイブリッドを製作してくれれば国際市場でも通用するハイブリッドマルチロータードローンが日本から誕生するかもしれない。