記事一覧
ロボットアームを使ってみよう4 PyBullet
高田です。ROSを使わずロボットアームをリアルタイムに動かす方法を色々調べていると、xArmのフォーラムで以下の投稿を見つけました。 https://forum.ufactory.cc/t/smoot…


ロボットアームを使ってみよう4 PyBullet
高田です。ROSを使わずロボットアームをリアルタイムに動かす方法を色々調べていると、xArmのフォーラムで以下の投稿を見つけました。
https://forum.ufactory.cc/t/smoother-linear-motion-with-xarm-7-leap-motion/2285
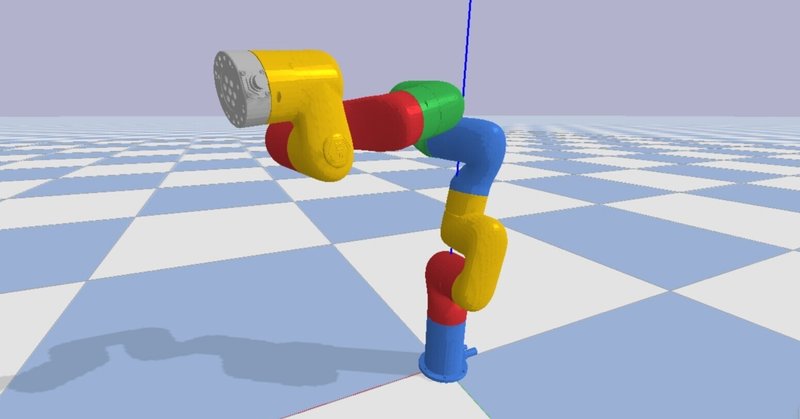
Bullet物理エンジンを使ってxArmの姿勢を計算するデモのようです。作者はBulletの開発者です
ロボットアームを使ってみよう3
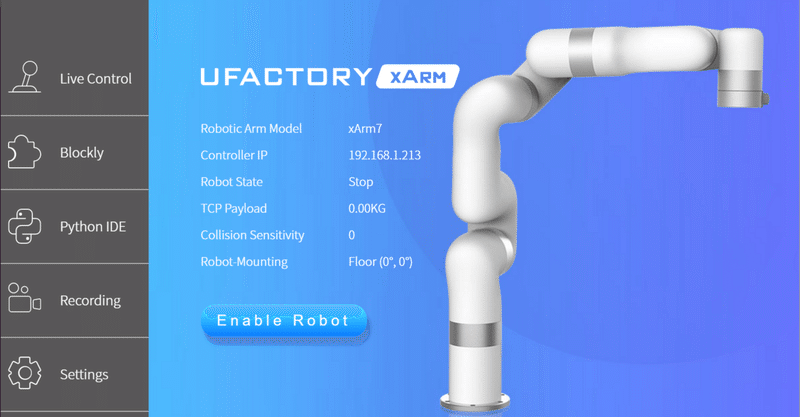
ロボットアームを動かしてみます、xArmが提供しているSDKを使います。
ロボットの姿勢を指定するには、各ジョイントの回転量を指定する方法とTCP(Tool Center Point)の位置と向きを指定する方法があります。どちらを利用するにせよ、ロボットの座標系を把握しておく必要があります。
https://github.com/xArm-Developer/xarm_rosにロボットの座標系
ロボットアームを使ってみよう1
高田です。ロボットアームを持っています。
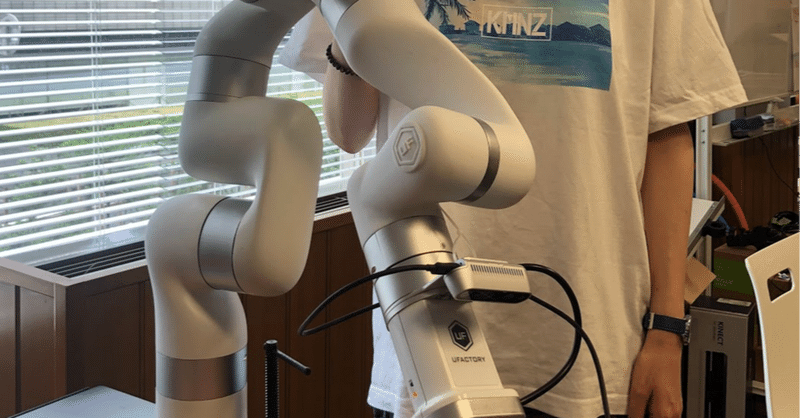
これはxArm7というロボットアームで主に実験用途に使われているようです、工業向けのタイプよりかなり安くて120万円ちょっとで買えます。これを使って何かしてみます。
アームには何か持たせてみるのが当然だと思います。なのでBlackMagic Micro Cinema Camera4Kを持たせてみました。
https://www.blackmagicd
赤外線懐中電灯とおばけ
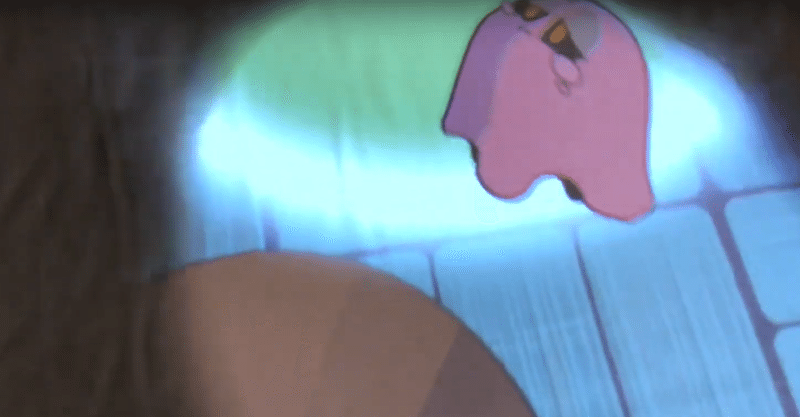
高田です。少し前に独自コンテンツの試作として、赤外線懐中電灯を使ったおばけ探しコンテンツを作りました。少し紹介させてください。
一見何の変哲もないように見えるんですが、床面に映像を写しているのはプロジェクターです。普通懐中電灯で床面を照らすとプロジェクターが投影している画像は見えなくなってしまいます。プロジェクターが投影する画像よりも明るくなるからですね。
しかし、このコンテンツでは懐中電灯で