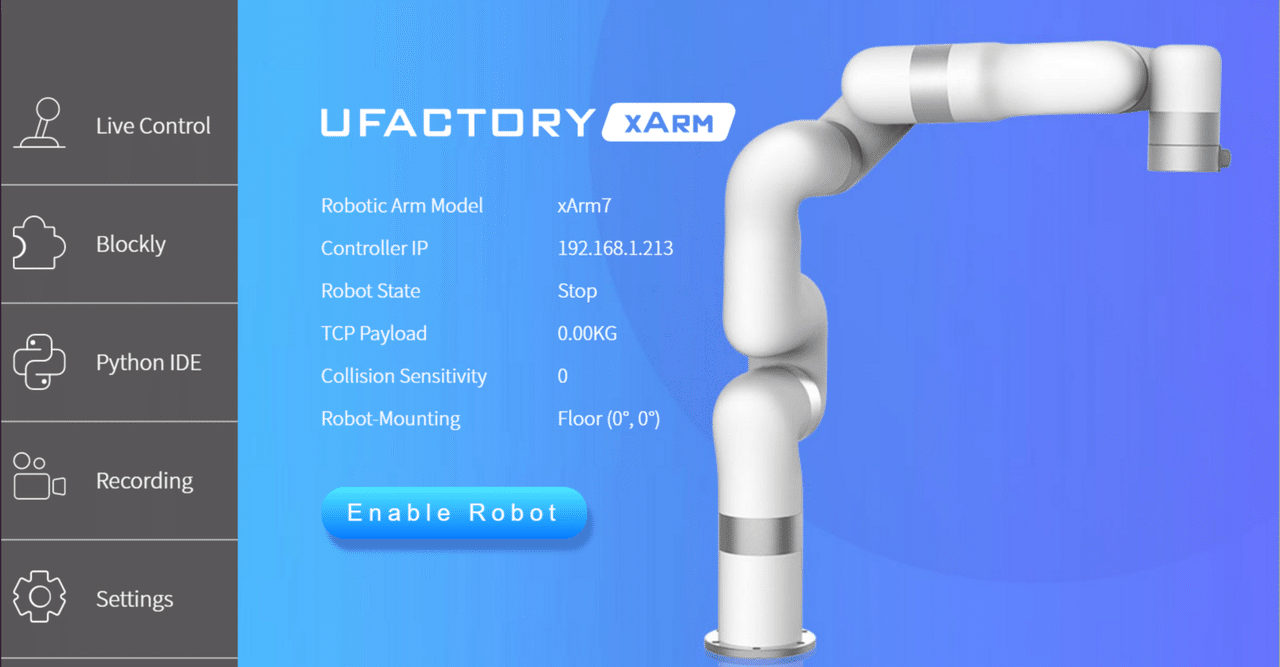
ロボットアームを使ってみよう4 PyBullet
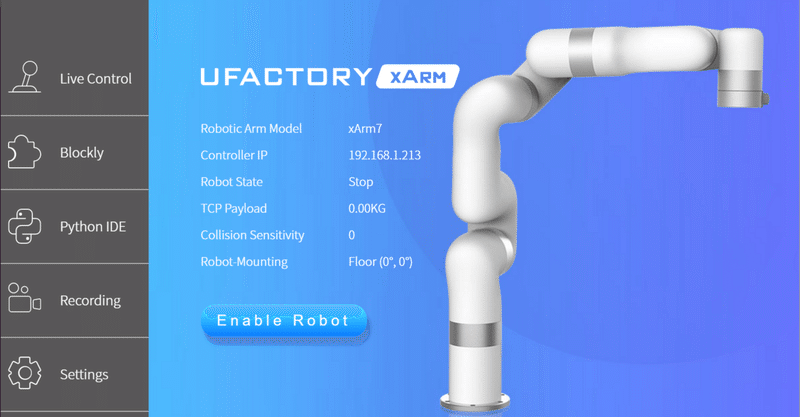
高田です。ROSを使わずロボットアームをリアルタイムに動かす方法を色々調べていると、xArmのフォーラムで以下の投稿を見つけました。
https://forum.ufactory.cc/t/smoother-linear-motion-with-xarm-7-leap-motion/2285
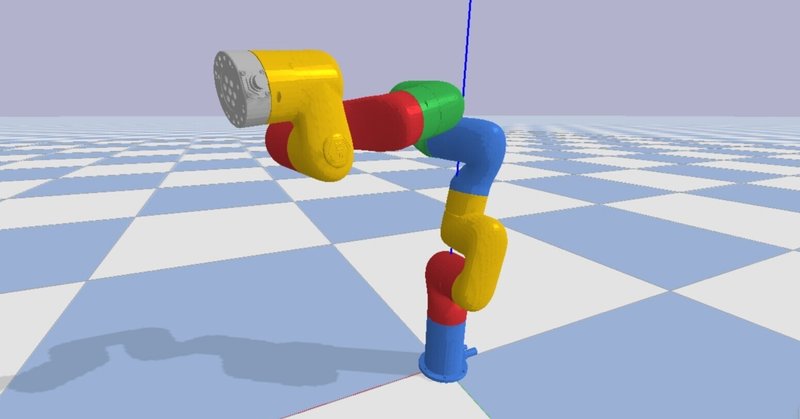
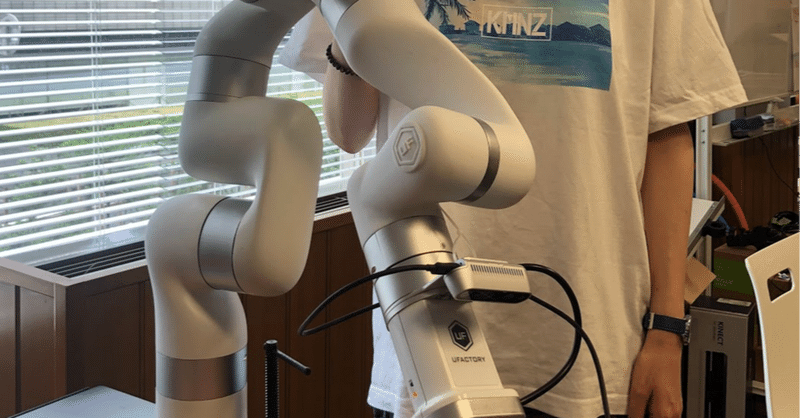
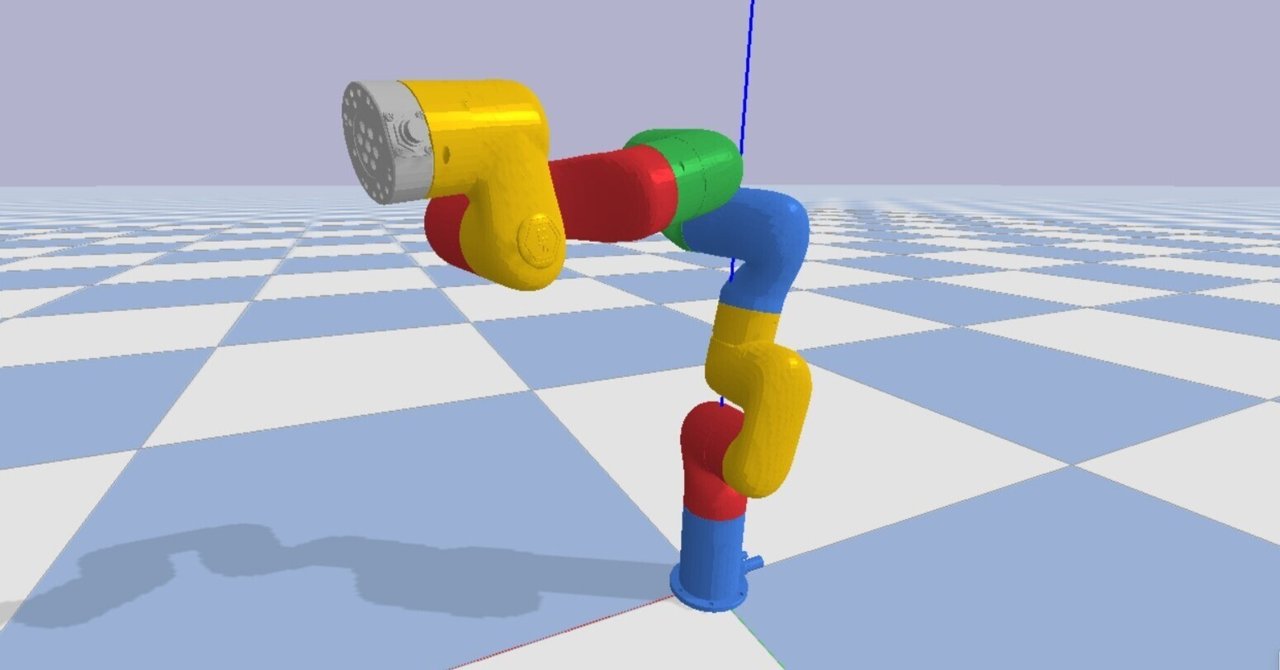
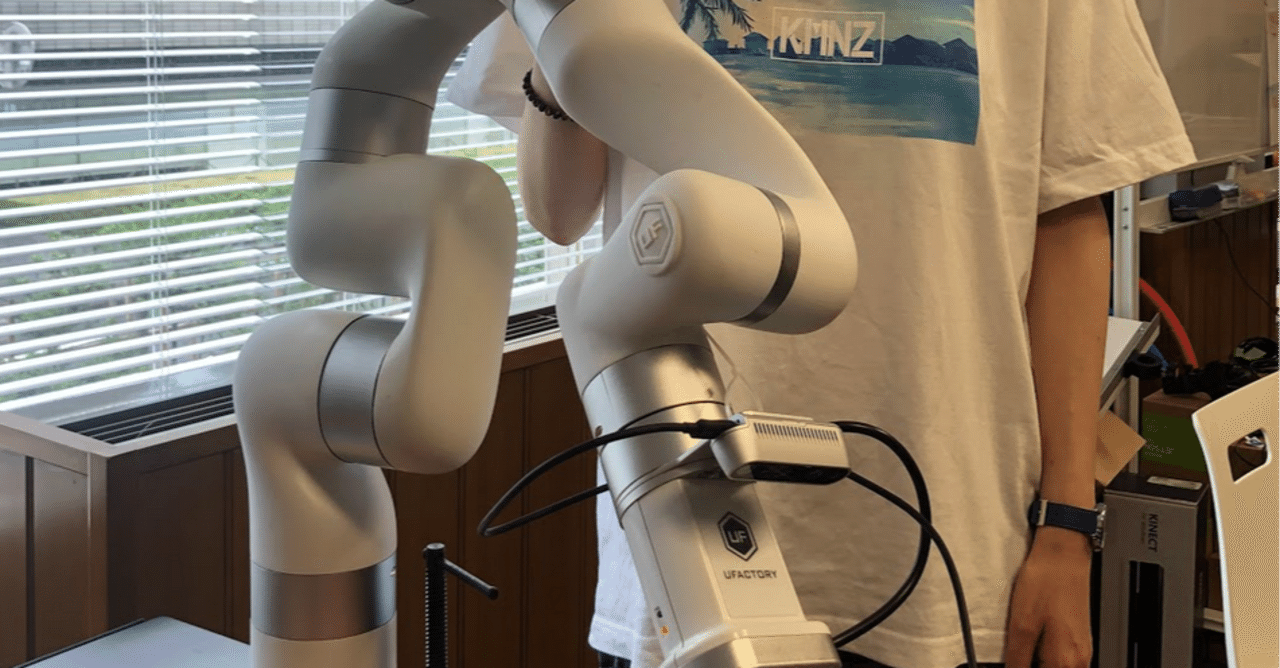
Bullet物理エンジンを使ってxArmの姿勢を計算するデモのようです。作者はBulletの開発者です。実機で試してみたところ、非常に高速に動かす事が出来ました。
肝はIKを自前で計