
スライムのように形状を自在に変えるロボットの制御方法を開発 MIT

これまでロボットといえば、関節やアームを持つ硬い構造が一般的でした。しかし、MITの研究チームは、まるでスライムのように形状を自在に変えることができる「ソフトロボット」の制御方法を開発しました。
このロボットは、圧力をかけると伸び縮みしたり、曲がるなどして形態を変化させることができます。人の体の中に入り込んで異物を取り除くなど、従来のロボットでは難しかった作業にも対応が期待できます。
しかし、関節を持たないこのロボットをどうやって動かすのでしょうか? 研究チームは、ロボットの動きを学習させる「強化学習」という手法を用いました。
従来の強化学習は、ロボットの関節など個々のパーツを動かすことを想定していました。しかし、今回のような形状変化するロボットの場合、全てのパーツを細かく制御するのは困難です。
そこで研究チームは、ロボットの動きを「画像」として捉えるという新しい手法を考案しました。ロボットの周囲の状況も含めた画像情報をもとに、ロボットがどのように形を変えれば良いのかを学習させます。
さらに、画像上での点と点の関係性を利用して、ロボットの各部分の動きを関連づけて学習させました。例えば、腕の動きは肩の動きと密接に関係しているため、画像上での点も同様に強い関連性を持つようにします。
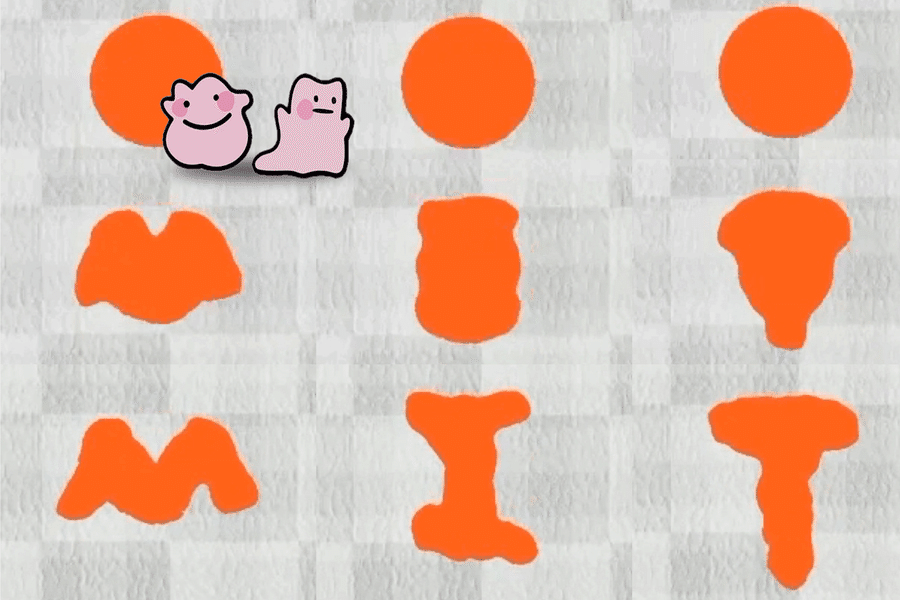
この学習方法により、ロボットは障害物をよけながら目的地に向かう、アルファベットの形に変形するなど、様々なタスクをこなすことができました。
形状変化ロボットはまだ開発初期段階ですが、今回の研究成果は、医療分野や産業分野での応用が期待されます。まるでSF映画のような、自在に形を変えるロボットの実現が近づいてきているのかもしれません。
詳細内容は、MITが提供する元記事を参照してください。
【引用元】
【読み上げ】
VOICEVOX 四国めたん/No.7
この記事が気に入ったらサポートをしてみませんか?