
バイオテンセグリティモデルによる側弯脊柱の多方向形状解析

バイオテンセグリティの原理は、1980 年代から研究されてきた生物システムの解剖学と生理学を説明する際にテンセグリティの概念を応用したものです。圧縮(椎骨)成分と張力(筋膜、筋肉、腱)成分からなるバイオテンセグリティは、安定した形状、安静時のプレストレス状態、およびシステム内での力の効果的な伝達を示します。バイオテンセグリティに基づく生体力学的モデル、特に細胞、分子、器官および組織、生物体および筋膜バイオテンセグリティ、ならびに細胞機械的シグナル伝達(メカノトランスダクション)におけるバイオテンセグリティの原理に関する広範な研究調査が報告されている 。現在までに、複雑な生物学的システムの形態と機能からエミュレートされたモデルとしてのバイオテンセグリティは、医療技術 、ヘルスケア実践 、工学用途 など、いくつかの潜在的な用途に提案されてきました。
安定性を維持しながら、荷重がかかると自己集合して全体的な変形を実行する能力などの特性により、テンセグリティの形状変化に対する関心が高まっています。形状変化を達成するためのテンセグリティの変形は、基本的に、部材の長さの作動、プレストレスの変化、およびテンセグリティの構造剛性の変化に基づいて生成されます。以前の研究のほとんどは、テンセグリティの複雑な機械的特性のため、静的または準静的展開解析を実装していました。テンセグリティの形状変化は、十分に遅い展開プロセス中に準静的問題として解決されました。テンセグリティの準静的問題の解決策は、一般に、数値アルゴリズム、分析アルゴリズム、および最適化アルゴリズムを使用することによって提案されます。張ら は、共回転アプローチに基づいて、クラスター化テンセグリティの準静的展開のための非線形有限要素定式化を導出しました。ヴーヴなどは、確率的探索と準静的解析を組み合わせて、ケーブル長の変化を通じて 2 つのハーフブリッジを接続する制御方法を研究しました。歩道橋の配置は、2 つのミッドスパン コネクタの 1 対の節点座標間の距離に基づいて解決されました。カンら は、クラスター化テンセグリティ ビームと、スライド ケーブル要素を組み込んだ 4 段テンセグリティ タワーの準静的解析と動的解析の両方を実行しました。システム平衡に対するエネルギーベースのアプローチと非線形有限要素モデルを使用して、展開中の 2 つの折り畳み可能なテンセグリティ膜システムの軌道と応力分布が調査されました 。Zhu と Deng は、構造的な耐荷重剛性の変化に基づいてカンチレバー テンセグリティの部材長さの作動を決定するために準静的な仮定を適用しました。Yıldız と Lesieutre は、準静的運動を仮定して、n ストラット円筒形クラス 1 およびクラス 2 の展開可能なテンセグリティ ブームの一般的な解析手法を開発しました。準静的プロセスと動的プロセスの両方に適した動的緩和ベースの運動追跡アルゴリズムを採用した形状制御方法が で提案されました。それにもかかわらず、バイオテンセグリティ、特に展開可能な構造物の形状変化解析に関する研究は見つかっていません。
その代わりに、多くの人がロボットやオートメーションへの応用のためにバイオテンセグリティの形状変化を研究しています。クラス 2 のバイオテンセグリティ水中ロボットは、本物の魚の剛性に近い剛性で設計および製造されました 。フィッシュテールの反転は、仮想作業法に基づいて定式化されたロボット本体の曲げ剛性をチューニングすることで実行されました。逆運動学を解くために力密度法を使用し、椎骨の形態にヒントを得て物体を把握するモジュール式テンセグリティ ロボットが開発されました。タコの触手の収縮動作を模倣した柔軟なバイオテンセグリティマニピュレーターの動作パターンに関する調査も行われました。バイオテンセグリティ ロボットの多くの研究は数値的および実験的研究を通じて行われていますが、特に外部負荷を受けた場合、カップリング システムが高度に拘束されているため、静的および運動学的問題はほとんど解決されません。
人間の脊椎の柔軟で多彩な多方向運動能力に触発され、3 つのクラス 1 脊椎バイオテンセグリティ モデルの形状変化プロセスがこの研究の焦点です。
提案されたモデルは、人間の背骨の細さと自然な曲率を幾何学的形状で保存し、特にバイオテンセグリティ原理による脊柱と筋肉の安定化ネットワークを強調しています。研究の目的は 2 つあります:
( i ) 著者ら が提案した形状変化制御戦略を脊椎バイオテンセグリティ モデルに適用した場合の有効性の評価、
(ii) 脊椎の潜在的な変形特性の調査一方向、双方向、三方向モードの脊椎バイオテンセグリティ モデル。
この研究の成果は、センサーとモノのインターネット (IoT) 技術を利用して自動タスクを実行するバイオテンセグリティ モデルの形状変化制御に拡張できる可能性があります。
脊椎バイオテンセグリティモデル
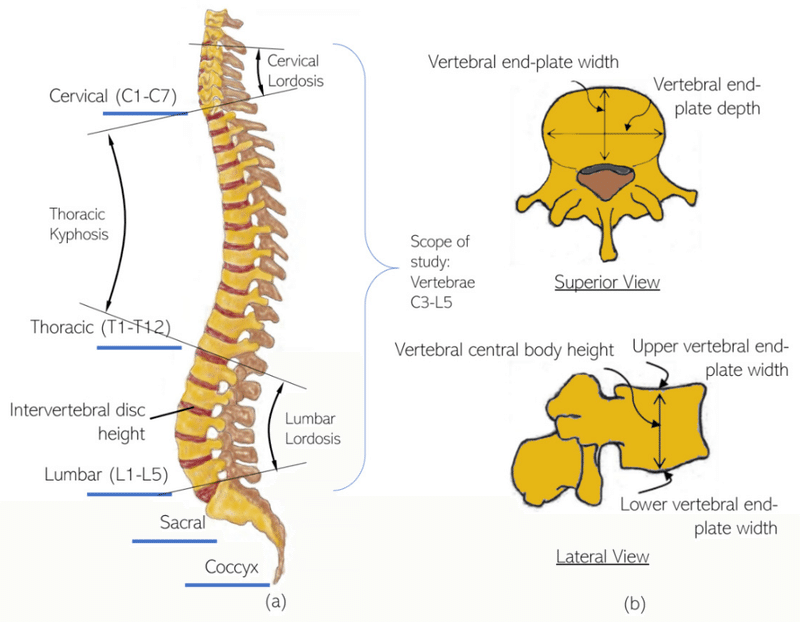
提案された 4 段階の脊椎バイオテンセグリティ モデル SB1、SB2、および SB3 が使用されました。脊椎バイオテンセグリティ モデルの解剖学的パラメーターとトポロジーについて簡単に説明します。実際の人間の脊椎の解剖学的パラメータの幅、高さ、自然な曲率が考慮され、人間の脊椎のトポロジーを模倣することによってバイオテンセグリティ モデルがモデル化されました。筋肉、筋膜、靱帯の正確な位置や、脊椎に接続されている体の他の部分は、モデリングでは考慮されていません。クラス 1 テンセグリティ マストは、椎間板によって隙間がありクッションがあり、筋 (ケーブル) で十分に囲まれている椎骨 (ストラット) で表される人間の脊椎を模倣するために採用されています。Busscherらによって研究された実際の人間の脊椎の解剖学的パラメータ は、脊椎バイオテンセグリティ モデルの幾何学的入力データに採用されました。これらの解剖学的パラメータは、椎骨終板の幅、椎骨中心体の高さ、および椎間板の高さです。椎体中心部の高さと椎間板の高さの両方の集合は、脊椎バイオテンセグリティ モデルの高さを特徴づけますが、椎間板の高さの累積は、下部セルの上三角表面とセルの上部三角形の表面の間の垂直距離に対応するサドルの高さを使用してモデル化されます。バイオテンセグリティ モデルの上部セルの下三角形表面。人間の脊椎のテーパ部分の特性が脊椎バイオテンセグリティ モデルに組み込まれています。合計 22 個の椎骨、特に頸部、胸部、腰部のそれぞれの椎骨 C3 ~ C7、T1 ~ T12、および L1 ~ L5 が脊椎バイオテンセグリティ モデルで考慮されました。脊椎バイオテンセグリティ モデルには、頂点 AP1 での頚椎前弯が 20.1°、頂点 AP2 での胸椎後弯が 34.5°、頂点 AP3 での腰椎前弯が 29.2°である人間の脊椎の自然な湾曲も組み込まれています。

脊椎バイオテンセグリティモデルの形状変化戦略
バイオテンセグリティの形状変化の数値シミュレーションで使用される解析戦略を簡単に要約します。凸問題を解決するには、座屈が発生しないように部材の軸力に制約を課します。さらに、形状制御パスを厳密に最小化することは、考慮されていません。そこで、文献に記載されている目的関数を目標位置からの距離とする逐次二次計画法の数値戦略を採用した。
形状変化の数値シミュレーションには、初期状態、変形状態、形状変化状態、目標状態が含まれます。初期状態は、拘束や外力のない形状探索解析から得られた状態に対応します。変形状態では、モデルは初期状態に拘束と自重を課して線形弾性変形を受けます。形状変化状態では、ケーブルの強制伸長によりモデルが形状変化します。目標状態とは、ノードの集合の座標を規定した場合に達成すべき状態に相当する。脊椎バイオテンセグリティモデルの形状変化プロセスは、変形状態から始まり、目標状態に達した時点で終了となります。
人間の脊椎の形状に触発された 3 つのバリエーションのバイオテンセグリティ モデル (SB1 ~ 3) の、一方向、双方向、および三方向モードの場合の形状変化を解析しました。アルゴリズムは、非線形計画問題を首尾よく解決し、ケーブルの最適化された強制伸びを探索し、特定の制約下での形状変化解析中にケーブルが緩まないことを保証します。単方向モード (99.96%)、双方向モード (99.98%)、および三方向モード (98.92%) を扱う合計 、および 168 の解析ケースで、目的関数の達成における高い成功率 (99.62%) が観察されました。 、 それぞれ。アルゴリズムで 2% の許容誤差を緩和すると、収束結果はさらに向上します。

一般に、総計算ステップ、NOF、および SB モデルのタイプに対応する監視対象ノードの変位の結果に大きな変化は観察されませんでした。脊椎バイオテンセグリティ モデルが曲げや軸方向の変形、およびこれらの変形の組み合わせを受ける能力があることが証明されました。変形した構成の結果は、脊椎バイオテンセグリティ モデル (SB1、SB2、SB3) が軸方向の変形と比較して、曲げ変形を受ける柔軟性が高いことを示唆しています。脊椎バイオテンセグリティ モデルの頂点 (AP1、AP2、AP3) は、形状変化の過程で曲げ、伸長、収縮、回転を可能にする関節として機能します。形状変化における頂点の寄与は、ターゲットの変位の大きさと、監視されているノードからの頂点の距離に依存します。形状変化制御のシミュレーションをさらに拡張するには、形状変化プロセス中の脊椎バイオテンセグリティ モデルの潜在的な変形を理解することが不可欠です。前述の方向に向けて、メンバーと外部障害物の衝突回避、および複数シリーズの監視ノードの適用については、将来の研究で検討する必要があります。さらに、形状変化解析戦略の策定において、人間の脊椎のモデリングを拡張して脊椎に接続されたパーツを組み込むことや、人間の脊椎の動きに対するさらなる制約も考慮する必要があります。
この記事が気に入ったらサポートをしてみませんか?