ロボットを体の一部分に|稲見昌彦×伊藤亜紗対談シリーズ 第2話

「稲見自在化身体プロジェクト」が描く将来像に向けた課題を、問題意識を共有する各界の識者と論じる対談シリーズ。第2回のゲストは、美学者で東京工業大学 未来の人類研究センターのセンター長を務める伊藤亜紗教授です。伊藤教授は、様々な障害を持つ人の身体感覚、義手や義足といった装具との関係、それらを通じた世界の認識について探り続けてきました。障害者の方々は、体の多重化や、他人との一体化など、自在化身体を彷彿させる日常を経験しています。ただし義肢はあくまで道具であって、体の一部と感じる人はいないとも。ホストの稲見教授との対話は、触覚がもたらすコミュニケーションの可能性から、身体の多様性や信頼の在り方まで大きく広がっていきます。
(構成:今井拓司=ライター)
(第1話はこちらからお読みください。)
機械は人に「ふれ」られるか
伊藤教授のプレゼンテーションを受けて対話が始まります。最初の話題は「さわる」と「ふれる」は工学的に再現可能なのか。
稲見 お話、どうもありがとうございました。先生が生物系から美学に移られたように、私ももともと生物が専門で、その後情報系に移ったので、もしかすると根っこが共通しているのかもしれません。
先生の本はだいぶ読んだつもりでしたが、まとまってお話をうかがって、聞きたいことがさらに出てきた感じです。先生の著作で素晴らしいなと思うのが、触覚という言語化しにくい感覚をきちんと活字で説明しているところで、大変参考になっています。先生の本を読むまで、(学生時代に在籍した東京工業大学がある)大岡山が、山という意識があまりなく、足の裏の触覚を通して山を感じられるという考え方が非常に面白くて、「目で分からなくても触れることで分かることが、だいぶあるのかな」と考えさせられました。
伊藤 ありがとうございます。ちなみに、テクノロジー的あるいは数学的に触覚を記述して、「さわる」と「ふれる」みたいなタイプに分けた研究はあるんですか。

稲見 「さわる」と「ふれる」という話に直接つながるか分からないんですが、学生時代にロボット研究サークルで、階段や坂道を歩いたような感覚を提示するためVR装置ARMS-Vというものを開発する過程で、自宅でトレーニングできる踏み台昇降みたいな装置にモーターを付けたものを作ったことがあります。階段を上る感覚を脚に与えられないかと思って、今東工大にいらっしゃる長谷川(晶一)先生と一緒にやりました。
そこで非常に面白かったのが、全く同じ足裏の軌跡のはずなのに、人が環境に対して仕事をさせるように制御すると上っているように感じて、環境から仕事をされるようにすると突然下り坂になるというのが明確に分かるんです。
さっきの大岡山の話じゃないですが、そういう触覚的なやりとりが(感覚の違いを生んでいて)、特にエネルギー収支が大切なんだというところが興味深かったですね。その意味では、エネルギー収支をうまく見てあげると、「ふれる」と「さわる」の違いが分かるかもしれない。
それに近い話として、ヒューマノイドロボットの開発者から聞いたんですが、握手ロボットって作るのがめちゃくちゃ難しいらしいんです。会社にVIPが来たときに、せっかくだから握手でもさせようという話になって、握手なんて簡単でしょうと、最初は手に触れた瞬間に手を上下させるように作った。ところが実際に握手してみると、めちゃくちゃ強引な感じがするらしいんですね。だったら関節を柔らかくしておいて、手に触れたら相手の動きに付いていくみたいにすればいいのかなと思ってやってみたら、今度はめちゃくちゃやる気がないふうに感じる。
伊藤 (笑)
稲見 結局、能動と受動が両方入ってないと、ちゃんと握手をしている感じがしない。ある程度自分でも動かそうとするし、だけれども相手の動きにも追従する、めちゃくちゃ高度な制御が必要になる。握手が難しいのは、(お互いが)「ふれる」ことで、ものすごい多くの情報をやりとりしているからかもしれません。
今はコロナでできなくなりましたが、西洋では昔から握手やハグがあいさつとして大切なのは、そういうことが分かるからではないでしょうか。先生の本の中で、VRを使った幻肢痛緩和法で(バーチャルな手につながった感覚を)「通電」という言い方をされていて、はっとしたんですけれども、相手にふれるときも通電に近いことがきっと起きているんじゃないのかと。
伊藤 面白いですね。たぶん、ここでの社会性って一言でいうと手加減だと思うんですよね。どう手加減するか。握手するときにも、最初自分はこのぐらいの強さで、と思っていたけど、相手の出方を見て、その力を強めたり弱めたりする。加減をするのがすごく大事で、そこに「ふれる」が発生するんだと思うんですね。
単純に相手が3だったら、じゃあ自分は4でいこう、みたいなパターンが固定されているわけではなくて、恐らくいくつかのレイヤーがあって、出方を調整しつつ、出方を調整する能力の高さ・低さも見ている。この人って相手の出方によって自分も態度を柔軟に変える人なのか、割と変えずにくる人なのかも見ていて、それによってさらに自分の出方も変えるといった、結構メタな交渉みたいなことも同時にしている気がします。すごくそれはパターンとして決めにくいものだと思いますし、そこを技術的に実現できたら、すごく面白いなと。
稲見 先生の言葉でいえば、握手によって、「ふれる」の生成モードが起きているんでしょうね。言葉で「あなたを信頼します」とかいうよりも、触覚チャンネルを使った方がはるかに饒舌に通じるという1つの例かもしれません。
触覚の破壊力
議論は、「ふれる」ことで生まれる社会性から、人間関係において触覚が秘める可能性の広さに進んでいきます。
稲見 我々も自在化プロジェクトの中で、合体と称して、背中にアームを付けたロボット二人羽織みたいな装置を作って、2人で1つの身体を操ったりしています。場合によっては離れた場所にいる人が(ロボットアームで)私の手首をがっとつかんで、動かされるみたいなこともあるんです。
これを設計したときに全く意図していなかった面白いことが2つありました。まず、当初は自分の手を持たれて誰かに動かされるのは非常に不自由なんじゃないかと想定していたんですが、逆に何で今まで自分の頭で考えて自分の体を動かしていたんだろうと(思うようになります)。もっというならば、ダンスをリードされている感じに近いですかね。他者に身を委ねるのは非常に楽かもしれなくて、それこそ信頼につながるのかもしれません。2つ目は、しばらくこれを使っていると、操作している人と操作される人が、めちゃくちゃ仲良くなるのが面白かった。
そこから考えると、みんなでお祭りでおみこしを担いで一緒に練り歩くとか、運動会のときにみんなで息を合わせて綱引きをするのは、触覚的なコミュニケーションを使った、共同体をまとめるツールじゃないかという気もします。そういう触覚のチャンネルが、身体を考える上でなくてはならないのかな、と思っていたところ、先生の『手の倫理』を読んで「ああ、やっぱりそういうことですよね」と得心しました。
伊藤 そうですね。触覚は確かにすごい大事ですが、実は西洋の人はずっと見下してきたんですよね。視覚が一番精神的な(上位の)感覚で、その次が聴覚。この2つは感覚の対象に物理的に接しないので、距離が取れて、人は冷静に振る舞うことができる。
一方で触覚と味覚と嗅覚は直接対象に接する。嗅覚も(匂いを)物質として摂取するので接していると考えられます。これらは対象に接触しているがゆえに人が冷静になれず、動物的な欲望とか暴力性が引き出されてしまう。だから非人間的な感覚なんだと見下されてきたわけです。
でも、私はそこもすごい面白いなと思っていて。人間性や社会性にとって触覚が重要だとさっき散々話しておきながら何なんですが、動物的なところが面白い。握手しようと思っていたのに、相手から違う情報をキャッチして、何かをかき立てられるとか。
あと、私は結構あるんですけど、例えば小さい子どもとちょっとチャンバラみたいなことをしていたら、いきなり本気になっちゃうとか。子どもは挑発がうまいので、それに乗ってしまって、ただの遊びだと頭では分かっているのに、何か手が勝手に強めに出ちゃう。確かに動物的だと思うんですよね。その最たるものが性的なものだと。
そういう自分の想定を常に超えていく破壊力みたいなものが触覚にはあって、だからこそ社会性というか人間性を考え得るのかなとも思うんですよね。そこを逆に消去して、「触覚は社会的だ」というだけだと、触覚の可能性を半分ぐらい捨てちゃうし、そんなに簡単に懐柔できない感覚だと思うので、逆に破壊的になる危険もあるなと思うんですよね。
自分はくすぐったくない

稲見 触覚が西洋文化の中でそこまで上位にならなかったのは、動物的なこともありますが、言語がすごい大切な文化なので、恐らく言語化しにくかったこともあるのかなと私は思っていました。言語じゃないものは思考ではなくて、思考がないのは動物だから、ということかなと。
一方で、言語化できる視覚や聴覚でも、触覚的な部分ってありますよね。うなずきもそうですし、Zoomでちょっと遅れがあって発言がかぶったときに、何か触覚的なものを感じませんか。体が触れちゃった、にすごい近いような。
伊藤 あれ、面白いですね。
稲見 はい。あとは視線が触れることもありますよね。視線が合う、合わないのくすぐったさとか。そこの部分は、実は視覚・聴覚の中でも相当触覚的な感じ方を我々がしているところ、もしくは、視覚や聴覚の身体性というのもあるんじゃないかなという気もしました。
伊藤 うんうん。面白いですね。目が合うとくすぐったいんですか(笑)。
稲見 私は目を合わせて話すのが決して得意な方ではありませんが……教師なので授業はやりますけど(笑)。あと、相手が見ているものを見たときに共感する感じとかも、もしかすると(触覚に)近いんじゃないのかなと。よくあるのが、鼻とかをずっと見られると、やはりくすぐったい感じがする。
伊藤 そうですね、くすぐったいって面白いですね。触覚を考える1つのモデルとして。自分の想定とちょっとずれてるのが、くすぐったいということで、まさに他者を感じている。
稲見 自分と他者の違いを見分ける実験として、くすぐり実験があるぐらいですよね。
伊藤 そうですよね。
稲見 自分で自分をくすぐってもくすぐったくないけど、誰かにくすぐられるとくすぐったい。
ジョイスティックでロボットの刷毛を動かして自分の指をなぞる実験で、間に遅れを入れていくと、確か0.2秒くらいでくすぐったく感じてしまうとか。ほかにも角度を変えていくと、90度に近くなるに従って、だんだんくすぐったさが増すみたいな。
脳が感じる自分の身体って、空間的だけでなく時間的な幅もあって、0.2秒ぐらい遅れると他者に近くなるし、90度回してしまうと自分の体でなくなってしまうと。くすぐるって自分と他者の境目だから、鏡を見て自分と目が合ってもくすぐったくない。
東洋医学はアクティブ計測
伊藤 針灸院とかに行くと、東洋医学ではくすぐったいかどうかって大事な指標ですよね。
稲見 そうなんですか。へー。
伊藤 体を触ったときに、ものすごくくすぐったがる人は、今日の私の話でいうと余白がない人で、感じすぎちゃっている。他者の手が自分に触れていることに過剰に反応しすぎていて、受け入れられないというのがくすぐったいという状況で、そこまで感じられず、触っていいよという方が健康的なんですよね。
稲見 私、昔は触られるのが本当に苦手で、めちゃくちゃくすぐったがりだったんですけれども、当時は余裕がなかったのかもしれませんね。
今の話で思い出しましたが、指圧とかって、まさに「ふれる」に近いかもしれないですね。先生の定義だと、医者の治療行為は「さわる」だったと思うんですけど、指圧の場合、治療がすなわち診察にもつながるみたいな言い方しますよね。
伊藤 そうですね。東洋医学と西洋医学では、恐らく身体観が違う。西洋医学は「さわる」だと思うんです。科学の対象として患者さんの体を見るけど、東洋の場合は「さわる」より「ふれる」に近くて、全ての反応が情報になる。触診と切診という言い方があって、西洋医学の場合は触診、触って臓器の状態とかを確認するのに対して、東洋の切診では、もうちょっと体の全体的な状態を見るんですね。
さっきの「くすぐったい」は、西洋医学的にはただのノイズでしかなくて、くすぐったがると臓器の状態が分からないから、くすぐったがらないでくださいみたいになるんですが、東洋医学の場合、それ自体が緊張度合いを示す指標になるので大事な情報なんですよね。
稲見 アクティブ計測ですね。われわれの業界の言葉で。パッシブに見るのではなくて。
視覚と触覚の違いで面白いなと思うところがあって。私は昔、視覚的に透明になる研究(光学迷彩)をしたんですけれども、視覚では間に何もないことが透明なんですよね。逆に触覚は、間に物がなくなると不透明(向こう側の情報が得られない)になっちゃうんです。つまり、触れることによって情報がうまく通過するようになるという、視覚と真逆の性質がある。杖とかがそうだと思うんですけれども。
私、以前、YCAM(山口情報芸術センター)でダンサーの安藤洋子さんのワークショップに出たときに、2人でペアになって相手の指をこうやって持って、その指にお互い全く力を感じないように自由に動かしなさい、みたいなことを言われたんです。それをやっていると、だんだんどっちに主導権があるのか分からなくなって、本当に自分の体の界面が溶ける感じがして。
先生も書いてらっしゃいますけど、触覚は自分自身の身体の界面を知る1つの指標だったし、それを感じなくなると溶けた感じがする。アイソレーションタンクとかもそれに近いのかもしれません。
6本目の指の感覚
2人の議論はさらに進み、人と機械の境界をなくし、あたかも体のように扱うためには何をすべきかを探っていきます。
稲見 私がやっている自在化とか身体拡張でも、視覚だけじゃなくて触覚がものすごいキーワードになっています。例えば、最近論文が通った電通大の宮脇(陽一)先生が作ってらっしゃる6本目の指。
手首にぐっと力を入れると、6本目の指がクッと曲がるんです。筋電(をセンサで検出して)で動かしているんですけれども、あれには実は仕掛けがあって、ロボットの指が曲がると、その角度に応じて刺激ピンが(装着者の)小指の横をずっとなぞってくれるんですよね。つまり目を閉じていても6本目の指がどういう角度にあるかが触覚的にわかる。ピンが下に来ると曲がっているな、上に行くと戻っているなという感じがして、それがすごい大切なんですよね。

この写真の「Stim pin」が刺激ピンで、これがずれてくれることによって、6本目の指の身体感覚と申しましょうか、その動きの触覚的な手掛かりになる。本来自分が持ってない身体に関しても、「通電」したように感じられるのかなと。以前から触覚の統合が身体性では大切といわれていたんですが、あらためて使ってみると、やはり触覚のパワーってすごいなと思います。
伊藤 あのピンが、手のひらのまさにこの辺に付いているのは、理由があるんですか。
稲見 まだそこまで調べていないんですけど、まず最初は、実際に動く場所に近い方が理解しやすかろうと。
伊藤 先週、今週と、ピアノのレッスンを見学したんです。ピアノをしっかり打鍵するには指の運動が当然重要なんですが、みんな指の付け根ってここだと思っているけど、実は骨の位置とはだいぶずれている。みんな、ここから動かすんじゃなくて、ここから動かす感覚をどうつくるかがすごい重要だと先生が話されていて。

ここから(指の付け根)ではなく、

ここから(骨の付け根)から動かす感覚
伊藤 さらにいうと、鎖骨も腕の動きに連動していて、ピアニストはつい手だけを意識しちゃうけど、鎖骨からのつながりを考えないとうまく弾けないと。(6本目の指の)触覚をどこにつくるのかによっても、ほかの指の感覚にも影響しそうですね。
オートマとマニュアルを自在に
稲見 人の身体って、ロボットと比べて難しいところがあって、ロボットでは大抵、関節にモーターが付いていて、センサーも関節に付いている。でも人間の場合、1つの筋肉で複数の関節を動かしたり、手とか骨があるところはまだ分かりやすいんですけれども、呼吸筋とか、首の回りとかって、どう筋肉が付いて動かしているか、全く意識できませんよね。
ロボットならば「モーターを3つぐらい付ければ十分かな」みたいな部分でも、複数の筋肉が統合して動いて初めて首をねじれるのは、ものすごいことなんだなと。最近は「筋シナジー仮説」とかもあるみたいですが……。我々が、一個一個の筋肉を意識しないでできてしまうのはすごいことでもあり、動かなくなったときにめちゃくちゃ難しいところでもある。
伊藤 そうですね。私は、がんとか交通事故で手足を切断した方など、幻肢を持っている方の調査をずっとしているんですが、幻肢痛という痛みとして感じられるケースがかなり多くて、それを緩和するためにVRとかが最近使われています。健康なほうの手の動きをデータで取って、それを左右対称にVR空間で患者さんに見せてあげると、自分の手が正常に動いていると脳が錯覚して、幻肢痛が消える仕組みなんです。
問題は、これを日常化することなんですね。VRとかで(幻視の存在を)意識している間はいいんですが、ずっとVRを付けているわけにいかない。意識的につくったバーチャル空間の手の感覚を、いかにもう一回無意識下に落とすか。そこに今、患者さんたちが取り組んでいらっしゃいます。
意識的にやったことを無意識化するって、学習の基本だと思うんです。それを、手という人間にとって一番表現的な部位であり、道具的な部位であるものでやることが、めちゃくちゃ難しくて。
稲見 無意識と意識の切り替えについては、先生もオートマとマニュアルみたいな話を書かれていたと思うんですが、そこがまさにオートマ動作とマニュアル動作の界面、私が勝手に「ウィーナー界面」といっているところに重なると思っていまして。

身体とは何かという定義はいろいろありますが、自分の思ったとおりにほぼオートマで動かせる範囲が、きっと身体なんじゃないのかなという気がします。確か、(ダニエル・)デネットが「自分の意図どおりに動かせる全ての総和が自己なんだ」みたいな言い方をしていました。
そこで私は、このウィーナー界面と呼んでいるところを、どんどん広げて(意識して制御できることを増やして)いくのが大切だと最初は思っていたんです。広げれば広げるほど人間は拡張されるんじゃないかと。
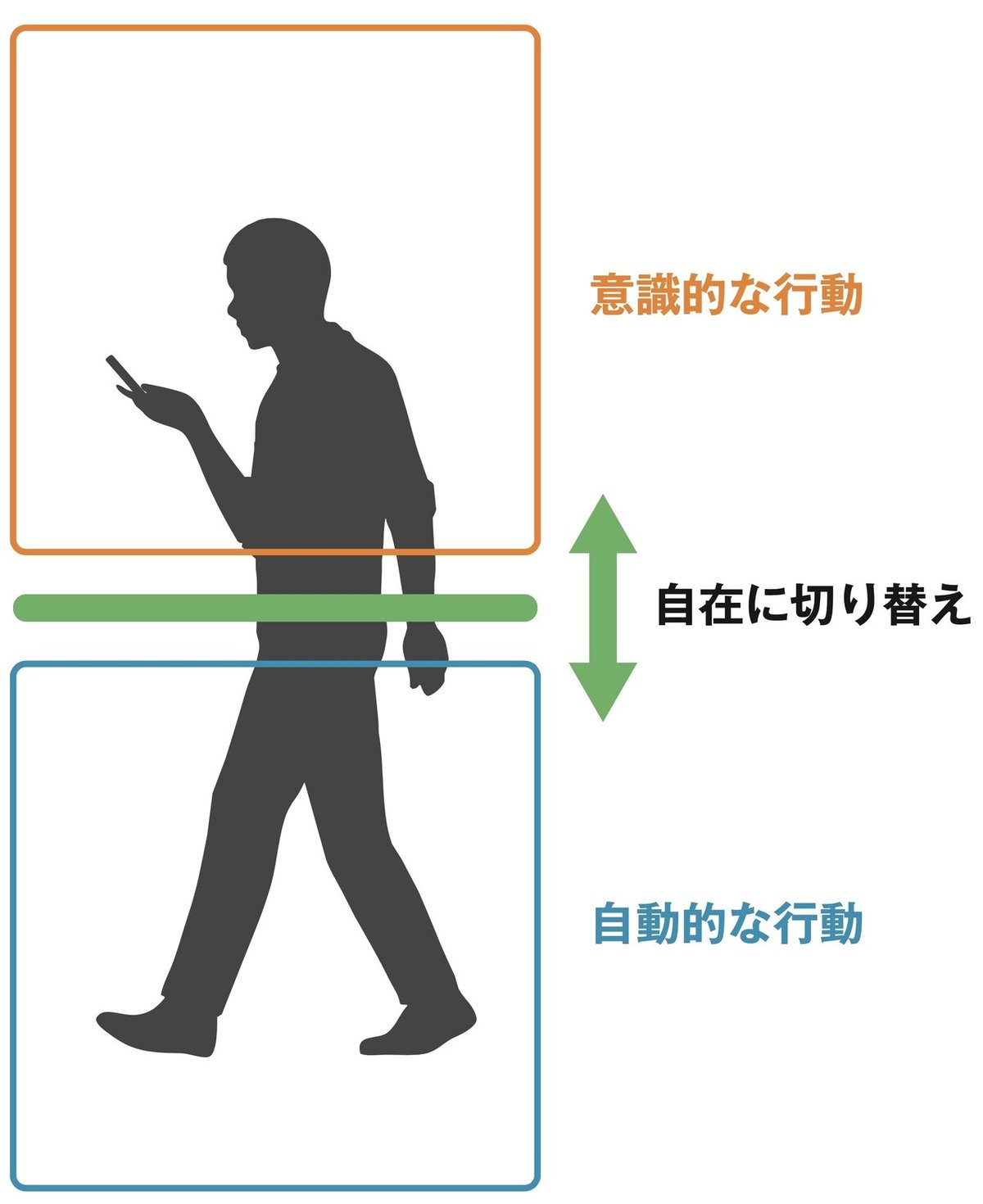
ところがふと思い返してみると、我々の心臓はほぼ制御できなくて完全なオートマだし、呼吸はオートマとマニュアルの中間ぐらいだったりする。さらに、歩きスマホをしているときの脚は、ほぼオートマだと。
そんなことを考えていくと、実はタスクの種類とか注意の与え方によって、オートマとマニュアルの間を自由自在に動かせる範囲こそが、実は自分の身体なんじゃないかなと最近思うようになった。なので先生が『記憶する体』で書かれているオートマとマニュアルの関係性がものすごい腑に落ちたんです。
伊藤 ありがとうございます。そうか。完全なオートマだと、自分の身体とは感じにくいってことですよね。
稲見 そうですね。マニュアルにしようと思ったときにすぐマニュアル化できる範囲が自分の身体であると。一方で完全にマニュアルのままだと注意をし続けなくてはいけないので、道具として思いどおりになっていないかと。きっとリハビリの最中は、ある意味、究極のマニュアルなわけですよね。
伊藤 人がマニュアル化できる範囲って、結構狭いですか。
稲見 恐らくそうですね。注意は一番有限のリソースかもしれないので。ジャグリングをやっている方とかも、ほぼオートマですよね。わずかなずれとかをマニュアルで直す感じになっている。
私も第3の腕、第4の腕を作っていますが、今のところマニュアルで動かしているんです。やはり、セミオートのような機能がないと、結局われわれはそれを使いこなすことにはならないという。
そういう意味では、先ほどの伴走者みたいな形は非常に良い関係性かもしれませんね。それに近い形をシステム側が持っている必要があるのかも。盲導犬もそうかもしれません。
身体化を阻むハードル
伊藤 障害を負うって、それまでオートマでやっていたことをマニュアルでやらざるを得なくなる世界で、『記憶する体』では「機能を器用さで補う」という話を書きました。片脚を切断した方が、それまでは何も考えずに歩けたけど、今は義足をすごく器用にコントロールしながら、道具として使っている。体の一部じゃなくて、杖みたいなものとして使っている。それがまたオートマに戻れば、もう一回身体化するんでしょうけど、そこのハードルが結構高い気がするんですよね。
稲見 確かに難しいかもしれません。でも一方で、車のオートマはよくできているなって感じます。あれは不思議ですよね。アクセルの位置や角度は、イコール速度にもなってないのに、ドライバーの意図は反映されている。ギアは意識もできれば、意識しないこともできますよね。もちろん、そこに至るまではものすごい開発者の苦労があったと思うんですが、可能かどうかというと、可能な例の1つではあるんじゃないかなと。
もしくは、それこそ格闘ゲームのキャラクターの動きや、1人でプレーヤーを10人とか11人操れるサッカーゲームとか。たぶんうまくオートマ(の制御)が入ったおかげで、プレーヤーの認知負荷をそこまで高めずに、普通の人が練習すればプレーできるレベルに達しているんですよね。その意味では、システムとしては可能かもしれなくて、もし義手や義足がまだ難しいのであるならば、研究の余地があるのかなという気もします。
伊藤 うん、そうなんですよね。ただ、自分は研究者としていろんな当事者と関わる中で、どこまで楽観視していいんだろうって、正直いつも悩むところで。エンジニアと一緒に当事者に会うと、エンジニアは身体の拡張っておっしゃる一方で、当事者はいつまでたっても道具なんですよね。義手とか義足って。
私は当事者の発言に寄ってものを見ていきたいと思っているんですが、体の一部になっているという人には、まだちょっと出会えていない。「何が足りないんだろう」「何があれば車とかゲームみたいに本当にオートマ化するのかな」っていう、埋め方のイメージが実はなかなか持てなくて。
稲見 熊谷(晋一郎)先生が以前書いてらっしゃって興味深かった話があります。3.11で地震があって避難する中で、電動車椅子だと避難できないので車椅子から自分の身体を離されたときに、痛みに近い感覚を得たとおっしゃったんですね。もしかして熊谷先生にとっては車椅子はやはり身体で、比喩かもしれないですが、それこそ幻肢痛に近い痛みなのかもしれない。その意味で熊谷先生にとっての車椅子は、道具でもあり身体でもあるんじゃないかなと。本人にお伺いするのが一番よいとは思うんですが、そういうふうに感じました。
伊藤 確かに、失われたときに自分の体が一部なくなったような痛みはあるんだと思います。さっきの盲導犬を亡くした方も、やっぱり自分の体が失われたような痛みを感じるとおっしゃいますし。逆に、もういない盲導犬が、幻視みたいな感じでしょっちゅう一緒にいて、スーパーとかに行くと姿が見えたりとか。
自己像の一部としての自分でないものが、確かにあり得るなと思うんですよね。それをどうやって運動レベルで延長として実感できるようにするか。もしかしたら、失うよりも拡張する方がハードルがあるのかなと、ちょっと思ったりはしますけど。
稲見 そこも触覚的なものがキーになるかなと思ってます。義手とか義足を接続部を通して杖のように感じる状態と、(義手や義足が何かに)触った感覚や地面に触れている感覚が、何らかの触覚フィードバックとして2次元にマッピングされた形で返ってくるのとでは、感じ方はきっと変わるだろうなと。(感覚が戻ってくる先は)体の別の部位かもしれないですけど。想像ですが、それが「通電」の補助になる気もします。

一人のための科学
稲見 ただ、先生がおっしゃるように、当事者の方々と向き合ってやっていくべきで、(一方的に)「こうなるはずだ」という話ではないと思いますね。先生のおっしゃる社会性には(エンジニアの見方と当事者の見方の)2つがあって、確かに私も気を緩めるとそれこそ「手段のために目的を選ばず」という「エンジニアあるある」に陥ってしまうところがあります。こういう身体の話では、一人一人の事例を積み重ねてボトムアップでやっていった方が、より真実に近づけると感じます。
伊藤 でも、恐らくいろんなことをやられてらっしゃるのかなと。
稲見 いや、迷いがあるんですよ(笑)。この前、思わず教員会議で「うちの専攻では定量的な研究じゃないとやっちゃ駄目なんですか。当事者というか(対象者の数が)n=1の研究は駄目なんですかね」みたいなことを聞いたんですけど、「いや、やっぱりそれはやるべきで、むしろ稲見先生が広めてください」といわれたんです。慰められたのか、励まされたのか、よく分からないんですけれども。いわゆる伝統的なエンジニアリングでも、ようやく人に対して働き掛けることをやろうとしているときに、そこ(当事者と組んだ研究)はますます大切になってくるのかなと感じます。
伊藤 そこは、すごく面白いところですよね。私も別の研究で、ちょっとスポーツに関する『見えないスポーツ図鑑』っていう……。

稲見 はいはい。渡邊淳司君と一緒に。
伊藤 そうです。あれは、もともとは観戦の方法を増やす研究で、選手が実際にプレーしているときの感覚って必ずしも視覚で見えるものではないので、それを触覚的な情報に置き換えて、普通の日用品の中に翻訳して体感する鑑賞ツールとしてやっていたんです。ただ現場の選手からは、選手一人一人の違いがものすごくあって、データで残しきれない部分を残してほしい、みたいなことを言われるんですよね。
例えば今度やってみたいと思っているのは、陸上の短距離のスタートってめちゃくちゃ重要だと思うんですけど、そこで何をイメージしてどう体を動かしているのかは、恐らく選手によってものすごく違っている。為末(大)さんに聞いた話だと、100メートル走の選手も「スタートするときにイメージするものの表現」は人によってちがうらしいんですね。
稲見 へー。
伊藤 本当にそれぞれが個人の体の中で納得のいく表現に落ち着いているんだと思うんです。そういうものを、もう少し共有可能にしていくことが、教育とかの場面ですごく大事だなと思っていて。本当にその人だけのための科学みたいなことを、やっていきたいなと思いますね。
稲見 今のお話で思い出したのが、ちょうど私がIPA(情報処理推進機構)という経産省の外郭団体の未踏というプログラムでいろんな学生を指導したりメンタリングをやったりしているんですけど、その中で、合気道をやっている北海道大学の学生が、合気道のコツをAR(Augmented Reality)で学べるシステムを作って、なかなか面白いんですよ。空中に浮いているボールに手を伸ばすように押しなさい、というコツがあるらしくて。私がグイグイ押しても押せないような物とか人が遠くにあるようにして、その遠くに手を伸ばすようにすると、確かに力が入るんですね。
頭の中でイメージしなさいといわれていたトレーニング法をきちんと可視化してあげると、より多くの人がコツをつかみやすくなる。ほかにも彼はいろいろと作っていて、そういうテクノロジーの入り方もあるかなと思いました。
(第3話に続く)
自在化身体セミナー スピーカー情報
ゲスト: 伊藤 亜紗
東京工業大学 科学技術創成研究院
未来の人類研究センター センター長
リベラルアーツ研究教育院 教授

生物学者を目指していたが、大学3年次に文系に転向。
2010年に東京大学大学院人文社会系研究科基礎文化研究美学芸術学専門分野を単位取得のうえ、退学。
同年、同大学にて博士号を取得(文学)。
日本学術振興会特別研究員を経て、2013年に東京工業大学 リベラルアーツセンター 准教授に着任。2016年4月より現職。
2019年の3月から8月まで、マサチューセッツ工科大学客員研究員。
2020年2月より東京工業大学 科学技術創成研究院 未来の人類研究センター センター長。
ホスト: 稲見 昌彦
東京大学先端科学技術研究センター
身体情報学分野 教授

(Photo: Daisuke Uriu)
東京大学先端科学技術研究センター 身体情報学分野教授。博士(工学)。JST ERATO稲見自在化身体プロジェクト 研究総括。自在化技術、人間拡張工学、エンタテインメント工学に興味を持つ。米TIME誌Coolest Invention of the Year、文部科学大臣表彰若手科学者賞などを受賞。超人スポーツ協会代表理事、日本バーチャルリアリティ学会理事、日本学術会議連携会員等を兼務。著書に『スーパーヒューマン誕生!人間はSFを超える』(NHK出版新書)、『自在化身体論』(NTS出版)他。
「自在化身体セミナー」は、2021年2月に刊行された『自在化身体論』のコンセプトやビジョンに基づき、さらに社会的・学際的な議論を重ねることを目的に開催しています。
『自在化身体論~超感覚・超身体・変身・分身・合体が織りなす人類の未来~』 2021年2月19日発刊/(株)エヌ・ティー・エス/256頁
【概要】
人機一体/自在化身体が造る人類の未来!
ロボットのコンセプト、スペイン風邪終息から100年
…コロナ禍の出口にヒトはテクノロジーと融合してさらなる進化を果たす!!
【目次】
第1章 変身・分身・合体まで
自在化身体が作る人類の未来 《稲見昌彦》
第2章 身体の束縛から人を開放したい
コミュニケーションの変革も 《北崎充晃》
第3章 拡張身体の内部表現を通して脳に潜む謎を暴きたい 《宮脇陽一》
第4章 自在化身体は第4世代ロボット
神経科学で境界を超える 《ゴウリシャンカー・ガネッシュ》
第5章 今役立つロボットで自在化を促す
飛び込んでみないと自分はわからない 《岩田浩康》
第6章 バーチャル環境を活用した身体自在化とその限界を探る 《杉本麻樹》
第7章 柔軟な人間と機械との融合 《笠原俊一》
第8章 情報的身体変工としての自在化技術
美的価値と社会的倫理観の醸成に向けて 《瓜生大輔》