
世界で最も歴史あるロボコン「マイクロマウス2023」で個人出場したエプソン社員が優勝!

2024年2月17日から18日に東京都立産業貿易センターで第44回全日本マイクロマウス大会(主催:公益財団法人ニューテクノロジー振興財団)が開催され、個人出場したエプソン社員の藤澤彰宏さんが「ロボトレース競技」で優勝を果たしました。
エプソンは優勝を記念し、社内でロボットのお披露目とエンジニア同士の技術交流会を行いました。本記事は、マイクロマウス競技の概要を説明した上で、技術交流会の様子をお伝えしながら、優勝したロボットの秘密、実走デモの様子、優勝した藤澤さんの感想について紹介します。
マイクロマウス競技は、ゴールまでの最短時間を競うシンプルで“知能的な”ロボットコンテスト
マイクロマウス競技は、参加者がロボットの構造からプログラミングまでを自作。ロボットが自らの力で迷路を走破してゴールへ達するまでの最短時間を競う大会です。ルールはシンプルながら、メカ、ソフトウェア、電気回路、センシング、制御、人工知能の技術を駆使し、いかに“賢い”ロボットを作れるかが勝負どころである知能的なロボットコンテストです。
主催者のホームページによると、「我が国で初めての“ロボコン”として30余年、全日本大会が開催され続けている、世界でも最も歴史あるロボット競技会」とのことです。
藤澤さんは、複数ある競技のうち「ロボトレース競技」に出場しています。

ロボットの精度を高める業務に従事。
走行ルートは事前には明かされず、大会当日に発表されます。つまり、予習は不可能。しかも「大会によってコース長や迷路の形状も異なる」と語る藤澤さん。いわば本番中にコースを「覚えて」「ラインに沿って早く走り抜ける」というテクニックが必要です。
「ロボトレース競技」の持ち時間は3分。制限時間内に最大5回の走行が許されていて、その中で最速タイムが採用されます。「1回目はロボットに搭載した各種センサーでラインの形状を読み取りながら走行し、人工知能に学ばせます。その情報を基に、2回目以降は高速で走行します。走行中も最適コースになるよう補正しており、常に“賢く”走れるように学び続けているのです」と説明します。
車体中央に吸引ファン?!
交流会で真っ先に参加者の注目を集めたのが大会で優勝したロボット(以降、車体と表現)。
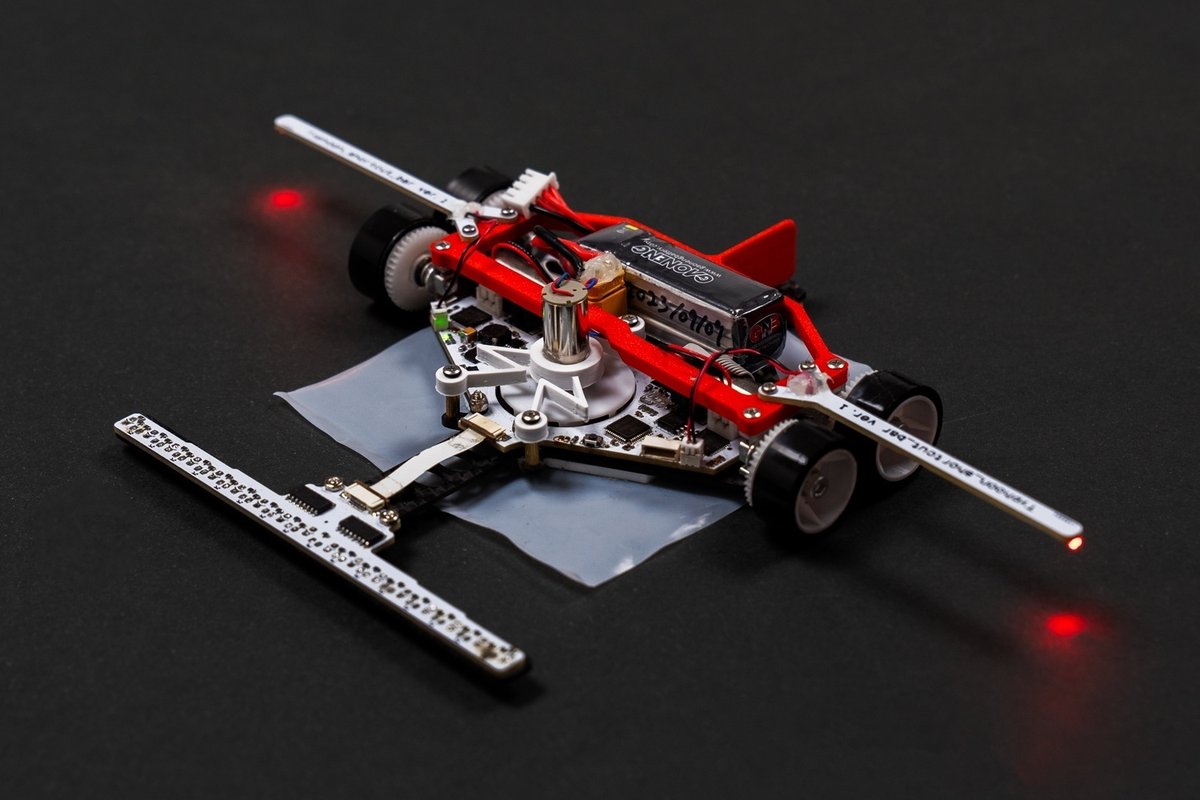
車体は藤澤さんが自ら設計しています。3Dプリンターで部品を自作したり海外に発注したり...といった苦労話や、モーターやセンサーの性能・費用についての裏話には参加者からの驚きの声が上がります。デモ会場に訪れた社員の多くは藤澤さんと同じエンジニア。技術的な視点で車体の秘密を明かしてくれました。

高速走行でポイントになるのは車体が滑らないこと。
2回目以降の高速走行時に車体がスリップしてしまうと1回目で測定したデータとのずれが生じ、覚えたルート上から外れてしまいます。さらにカーブは強い遠心力がかかるため、車体が滑ると飛ばされる事態にもなりかねません。強い遠心力に打ち勝ちながらカーブを高速で曲がるためには、接地力を増す(すなわち、タイヤのグリップを強くする)必要があります。
そこで、滑りにくいタイヤ素材の採用に加えて、車体には特製の吸引ファンと、「スカート」と呼ばれる薄いシート状の部品が取り付けられています。ファンの回転で車体下の空気を吸い出すことでスカートと床面を密着させます。ぴたりと床に張り付くように走行することでタイヤのグリップ力が増し、急激なカーブでもスピンせずに走行できるのです。
「どのように空気を吸引し、負圧をタイヤのグリップに変えるのか、最初は手探りでした。試行錯誤しながらノウハウを蓄積しました」と苦労を明かす藤澤さん。「ほかの選手の車体よりも強い吸引力を生み出す機構を開発できたのが勝敗を分けた一因だと思います」と大会を振り返ります。

いざ、実走デモを見る!!
走行1回目はラインの形状を読み取りながらゴールまでゆっくりと進みます【探索走行】。
そのとき、車体前面のフォトトランジスタが赤外線の光量(明暗)から白いラインを見分けていきます。また、モーターに取り付けたエンコーダがタイヤの回転数から進んだ距離を、ジャイロセンサーが進行方向を計測します。これらを総合的に処理することでロボットの位置を推定します。この情報をもとにAIが最短で走れる経路を自動計算します【走行計画を作成】。

走行計画の作成後、スタートボタンを押します【最短走行】。
ただ、再度走ると計画通りにはならず、ごく僅かに誤差が生じます。そこで2回目以降の走行中に自動補正していくのですが、「このアルゴリズムの開発はかなり大変でした」と胸の内を明かします。
最短走行を見た参加者から「おおー!」という歓声が上がりました。

実走デモは短いコースでしたが、本番はもっと長く、複雑な形状をしているので、実際の様子は大会の映像をご覧ください(リンク)。
皆さんも、マイクロマウス競技に挑戦してみませんか?
最後に全日本大会で優勝した感想を聞いてみました。
「個人で参加できるロボコンの中でマイクロマウスは最も大きい大会です。そこで優勝することを人生の目標の一つとしていたので、その願いが叶って、めちゃめちゃ嬉しかったですね。過去、優勝した人の中には2連覇3連覇していく人もいるので、来年は気を張っていきたいと思います」と嬉しさを噛み締めます。

続けて、マイクロマウス競技に挑戦しようとしている方々に対してエールを送ります。
「先ほどお話した通り、マイクロマウスは大きい大会なので、どうしても怖気づいてしまうのですね。でも『そんなことはないよ』と伝えたいです。ハードルが高そうと迷っているのであれば、既製品のロボットを買って出場することも可能なので、気軽に参加してほしいですね。もし困ったことがあったら大会に出ている人たちが丁寧に教えてくれます」と優しく語りかける藤澤さん。今後は多くの人に参加してもらい、技術を伝承していくために「大会参加に加えて普及活動にも力を入れたいです」と抱負を語りました。