
「コピーロボット」



【コマネチロボ】
人が動く動作をそのまま
ロボットの動きに反映させて
人間と全く同じ動きで操作できる
活気的なロボットが開発されてます
このロボットの名前は
「ナディア」と言うロボットで
南の海のナディアの方でなく
ナディアコマネチから取られました
ナディアが動作する様子は
操縦者の動きを細かく反映し
まるで人間のような滑らかな動きで
ボクシングの練習ができます。
この人型ロボットは
フロリダ人間機械認知研究所と
「ボードウォークロボット社」が
協力して開発中です。
ナディアに対する目標は
人間と同じ可動域を与える事で
その為人間の動きを極めようと励む
体操選手を参考にする事にしました
この開発でナディアには
体操選手並みの身体の可動域を
ロボットに獲得させる事を目指し
可動範囲を凄く広くしてます。
この事からナディアという名前は
1993年に国際体操殿堂入りした
ルーマニアの女子体操選手
ナディアコマネチから取られました
〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
【動作方法】
人型ロボットが
人間と同じように動けるなら
危険な環境でも遠隔操作で
人間の代わりに作業させられます
例えばや消火活動や災害救援
爆発物処理など危険な目に合わず
ロボをレバーやボタンで操作せず
人の体の動きで操作可能です。
人の動きをそのまま
ロボットの動きに反映させられれば
難しい職人技もやらせる事が出来
自宅で現場の仕事が出来ます。
実際ナディアがもつ29の可動域は
世界の人型ロボットの中でも
最大稼働箇所数のロボットで
十分に繊細な動きが出来ます
しかも油圧の伸び縮する駆動と
電気モーター駆動の組み合わせで
人型ロボットの中で最高の馬力と
滑らかな動きを実現してるのです
現時点でのナディアの操作方法は
VRヘッドセットを付けて
体に取り付けられたセンサーを元に
人の動きと同じ動きをします
腕の動きは
手持ちのコントローラーの位置を
センサーが検知して動き
正確でしなやかな動作が可能です

〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
【操作方法】
体の前後左右回転の動きは
ゴーグルの位置情報を元に
人間が見てる方向や高さを検知し
ロボットの体が動きます。
足の動きは
人にセンサーが付けられてないので
手持ちのコントローラーで操作し
走ったり歩いたり可能です。
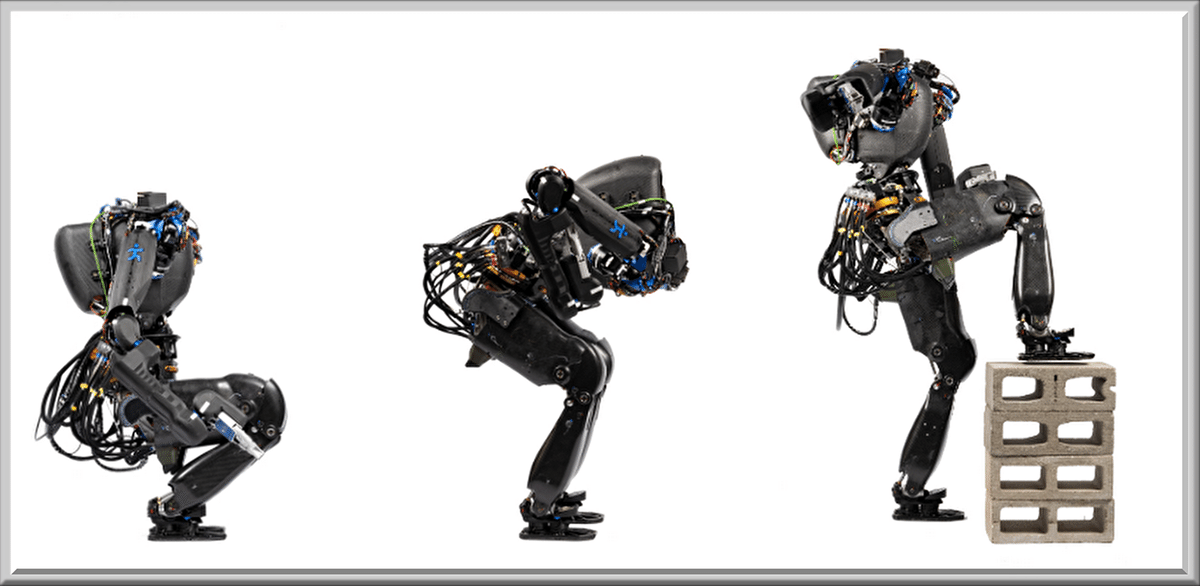
両足を曲げて中腰になったり
しゃがんだりする動作は
ゴーグルの高さセンサーを元に
その位置になる様足を曲げます。
ナディアの開発の課題は
まだ動作がそれほど速くなく
人の素早い動きに対応できなくて
どうしてもついて行けない点です
この課題をクリアーする方法として
強力な油圧式人工筋肉を使用したり
大電力大出力の駆動モーターで
関節を動かす方法があります。
しかしこのどちらも
膨大な電力を必要とするので
とても性能が良いバッテリーを
使わないとならなくなります。
もし小型原子炉を装備出来れば
超大電力を半永久的に発生出来
将来ガンダムみたいな巨大ロボも
動かせるようになるかもしれません
サポートしてくれたら 明日食べる もやしを買う事ができます((+_+)) よろしくお願いします( ゚Д゚)