
Lanky Porter搭載機能の紹介 vol4-安全性能、走行能力-

こんにちは。那須です。
私からは前回に引き続き、今回もLanky Porterの機能やスペックを深堀し、ご紹介してまいりたいと思います。
これまでの記事と重複する内容があるかもしれませんがご容赦ください。
狭い通路の通行能力
まずはLanky Porterのサイズをおさらいしておきましょう。Lanky Porterの本体サイズは、奥行526mm、幅493mm、高さ1320mmとなっています。
走行に際しては、Lanky Porterの幅に対して左右10cmほどの幅があれば、スムーズな走行が可能です。
つまり、走行のための最小通路幅は、およそ70cm程度です。もう少し具体的に70cm幅を表してみると、これは32型のテレビと同じくらいの幅なのだそうです。かなり狭い印象ですが、問題なく走行できるのはLanky Porterの凄さではないでしょうか。
さらに驚くべきことに、実はLanky Porterはもうひと段階狭い65cm幅の走行も可能です。以下の画像はテストを行った際の様子です。連続する65cm幅の通路でもぶつからずに走行しているのがわかります。

道幅と進路の障害物、自分の位置を基にAIでルートを計算し、障害物を回避しながら走行しているのですが、この技術にはただただ驚くばかりですね。
運搬中の緊急衝突回避
続いては緊急回避の機能についてです。以前にセンサー関連のお話はしましたが、これも少しおさらいをしておきましょう。
Lanky PorterにはLiDARとRGBDカメラという二つの高性能センサーが搭載されています。この二つのセンサーを利用して、進行方向の障害物や情報を逐一検知し、安全な自律走行を可能にしています。
では実際に物を運搬している際にはどの様に動作するのか?
通常走行中は、障害物までの距離が1.7mほどになると、障害物との衝突回避ルートの計算を開始します。前方の経路幅も計算し、回避や迂回ができないと判断した場合、Lanky Porterは障害物から約20~30cm離れて停止します。
走行中に急遽障害物が現れた場合は、即時に回避動作に入り、停止をします。この際に急ブレーキで停止すると、トレーの上の物が倒れたり、零れたり、落ちてしまったりする懸念があります。
そのため、Lanky Porterはブレーキをかけながら回転という動作を行い、物にかかるGを逃がすことで対応しています。
この動作によって水などを運んでいる状態でも問題なく回避する事ができるんですね。下の画像は水を載せて走行してるLanky Porterの前に人が飛び出した時のテストの様子です。

回転を加えて回避していますが、気になるのは載っている水の状態。

若干揺れはしたものの、下の写真のように零れていません。

広い場所でのテストなので、Lanky Porterが避けやすい環境ではありますが、ある程度の道幅が確保できていれば同様の動作を行ってくれます。
目線の高さの障害物回避
ここまではどちらかというとLiDARセンサーでの動作でしたが、RGBDについても少し紹介しておきます。
足元の障害物はLiDARで確認していますが、下図のような足元に隙間の多いテーブルなどはLiDARでは完全に検知することができません。

このようなテーブルは、天板が張り出ているのでぶつからない様にRGBDで確認をする必要があります。
この障害物を避けているのが、下記の画像になります。

ルート上にせりだした障害物が置かれています。この場合、Lanky Porterはどのような動きになるでしょうか。
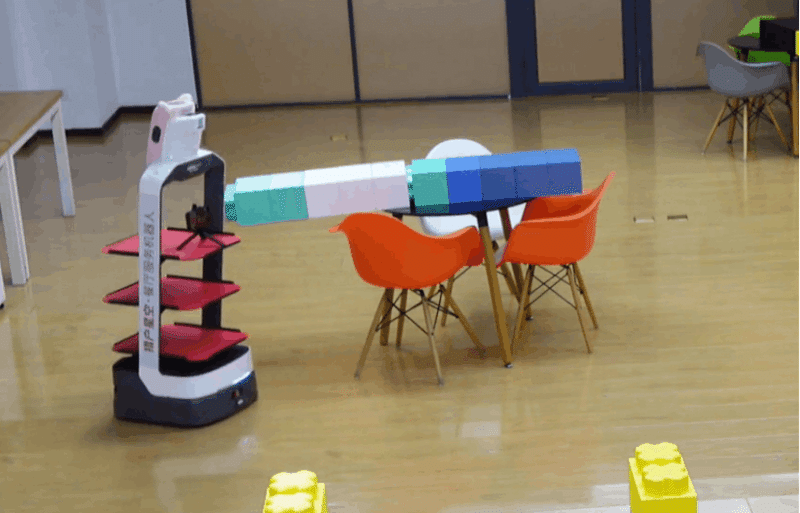
ご覧のようにきちんと障害物を認識して回避しながら走行しています。
このようにあらゆるシーンを想定して、安心安全にご活用頂けるよう、Lanky Porterは機能設計されているのです。
今回ご紹介したテスト動画は、ご要望があればYouTubeチャンネルにアップしますので、ご覧になりたい方はぜひコメントしてくださいね。
お店でお試ししてみませんか?
飲食店では様々なレイアウト、様々な家具がおかれており、ロボットにとって、とても複雑な環境ではありますが、ご覧いただいた様に、Lanky Porterはどの様な環境でも適応できる機能を備えています。
安全かつ店舗運営に役立つように様々なご提案をいたしますので、もしご興味のある方はぜひお気軽にお問い合わせください。
https://biz.kingsoft.jp/ai/dl/
私たちの『ロボットを通して様々な思い』や『皆さんにお知らせしたいこと』を積極的にnoteで発信しています。サポートのつもりで、”スキ”や”フォロー”、”シェア”などをして頂けたら飛んで喜びます!さらに”コメント”を頂けたら私たちの励みになりますので宜しくお願いいたします!