自動運航船で世界をリード!日本の船よ、黒船になれ!【自動運航船シリーズ vol.1】

今、世界に先駆けて、日本の海運業界が大きな変革点を迎えています。
デジタル技術を活用した運航状況や船内外ナビゲーション、エンジンなどの機関システムの見える化が急激に進んでいます。
そして、その先に目指すものは"無人運航船"の実現。
競合他社とも手を取り合い、オールジャパンで進められている無人運航船プロジェクト。長年航海計器で業界を支えてきたフルノの目線で取り組みを紹介します。
無人運航船の目となり、頭脳となる
「みえないものをみる」から「その先へ」
フルノでは2020年に"自律航行システム開発部"が発足し、船舶の自動運航の実現に向けて様々な技術開発を進めています。今回は同部市場開発室の松本さんに概要を伺いました。

松本 大助さん
2005年入社、知的財産部を経て、自律航行システム開発部 市場開発室へ。
自動運航船向けのセンサーやシステムの市場調査や企画、知的財産に関する業務を担当している。
松本さん「現在、日本では少子高齢化が進んでおり、海運の船員も例外ではありません。内航海運の船員の半分以上が50歳以上であり、大きな課題となっています。また島国である日本は数多くの離島があり、その生活の軸となるのは船です。しかし朝夕の1日2便のみの航路も多く、離島航路の維持も課題のひとつ。
さらには海難事故の原因も多くはヒューマンエラーといわれており、海難事故ゼロを目指すフルノとしてはなんとか解決したい課題ですね」
これらの社会課題の解決策のひとつとして大きく期待されているのが"無人運航船"ということです。2020年より日本財団が推進する無人運航船プロジェクト「MEGURI2040」の2つのコンソーシアムに参加し、さらに技術開発を加速させています。

ー MEGURI2040 ー
本プロジェクトでは、2025年までに世界初となる無人運航船の実用化に向けて、国内各分野の企業が協力し、実証実験を実施。無人運航が実現することで、流通、人、コスト、交通などのMEGURI(循環)がよくなり、便利になる、そして2040年には国内を走る船の50%が無人運航船となることを目指している。
全5つのコンソーシアムのうち、「1.無人運航船の未来創造~多様な専門家で描くグランド・デザイン~」「2.内航コンテナ船とカーフェリーに拠る無人化技術実証実験」にフルノは参画。
その中でフルノに期待されていることはどういったことなのでしょうか。
松本さん「フルノは長きにわたり船舶用航海機器や無線通信装置などで航海の安心・安全を支えてきました。これらの開発で培った技術やノウハウは自律運航船にも必ず活きてきます。
フルノ独自のセンサー技術を活かした「周囲状況把握」と「把握結果に基づいた避航操船」などを中心に研究開発に取り組んでいます。「みえないものをみる」という認知から「その先の船を動かす」という判断・運航までを行い海難事故ゼロ、そして無人運航船の実証実験の成功に貢献したいと考えています」

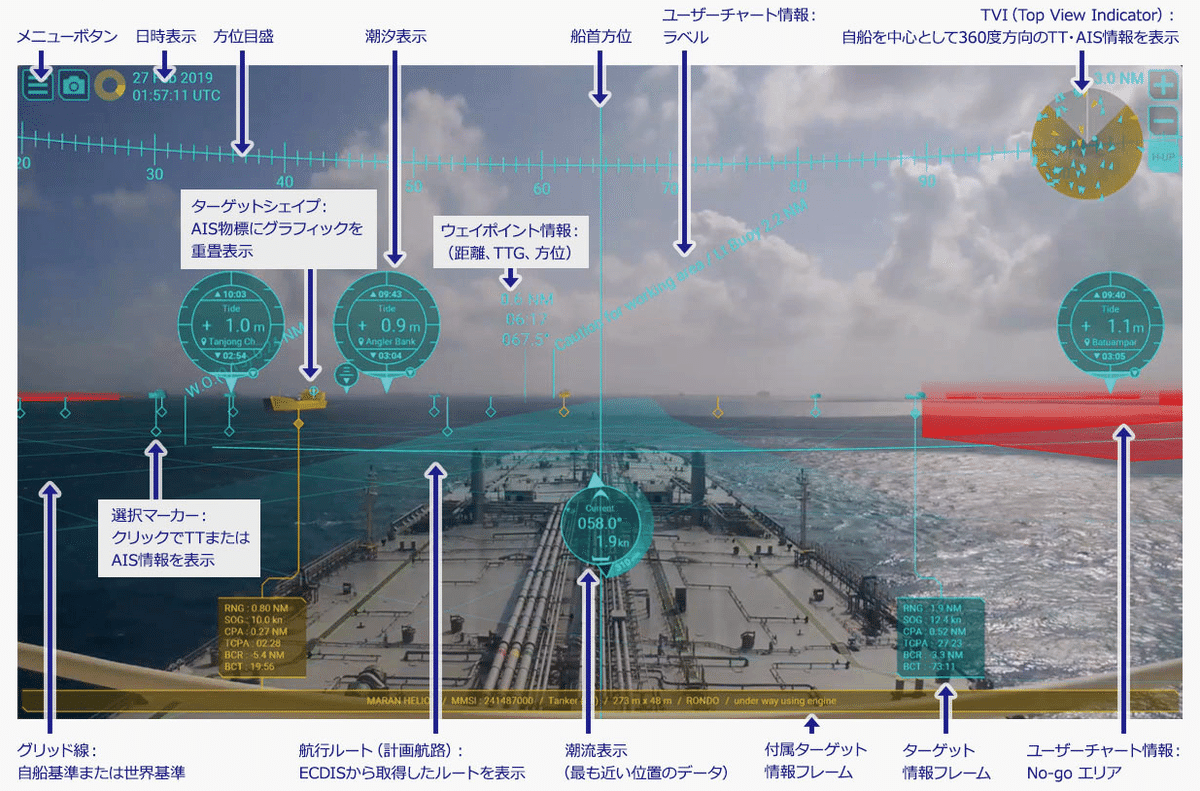
船舶の前方に向けて設置したカメラの映像をディスプレイ上に映し出し、
その映像上にAR技術を用いて航行に必要な情報を重畳表示する
自動運航船の課題とは
フルノの持つ技術と新たに得た技術
こうして始まったオールジャパンの無人運航船プロジェクト。では一体、自動運航・無人運航にはどのような課題があるのでしょうか。現在の技術でも海上でルートを決めて走ること自体はオートパイロット搭載艇であれば可能で、一見簡単に実現できるのでは?と想像してしまいます。
松本さん「オートパイロット等の既存の自動化システムだけではできないことが大きく2つあり、それを解決するのがフルノの目指す技術になります。ひとつは"避航"、もうひとつは"離着岸"です」
通常の船舶ではレーダーや航海士の見張りによって他船や障害物を見つけ、適切な避航ルートを考え、船を操船します。その避けるルートを適切なものにすることが重要であり、難しいことなのだと松本さんは言います。
松本さん「避航ルートを策定するためには、まず他船を正確に見つけることが必要になります。他船がどれくらいの速度でどの方向に進んでいるのか、またその大きさはどれくらいなのか、このような認知部分がまず重要になります。
そして、自船の操縦性能や海況、さらには航行ルールに従うように避けることはできるのかなど、様々な情報を統合的に勘案してはじめて避航ルートが策定できるようになります。これが判断・運航部分になりますね。複雑なバリエーションの中で最適解を選ぶことに技術課題があります」
認知部分の課題を解決するために新たにカメラ画像認識技術を獲得し、従来のレーダーやAIS(船舶自動識別装置)などにプラスしてカメラ画像認識から得た情報を統合するとのこと。
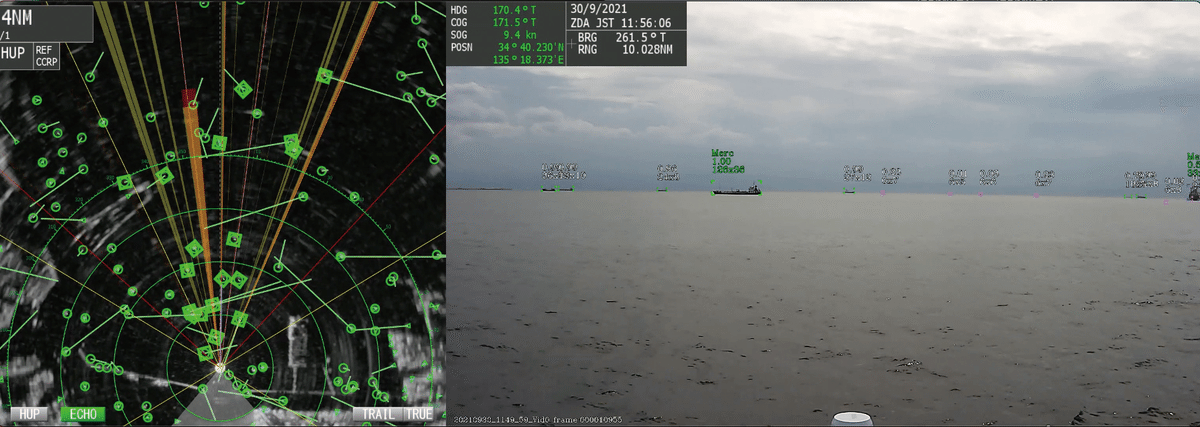
(左:レーダー映像、右:カメラ映像)
レーダーやAISの情報とカメラで識別した情報を統合して表示しています
また離着岸に関しても一筋縄ではいかない課題があるのだそう。
松本さん「タンカーなどの大型船の場合、船体長は200mほどのものあります。そうなると1度の傾きでも船の前と後で3.5mほどのズレが生じます。岸壁にぶつからないよう自動で調節するのは至難の業であることを理解してもらえるかと思います」
ここで目を付けたのはLiDARという技術。LiDARはレーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを高精度で計測することができます。船にすでに搭載されているセンサーとこの技術を組み合わせることで岸壁までの正確な距離と船体の状態を認知し、離着岸時の操船を制御しています。

カメラ映像へ岸壁までの距離情報を重畳表示(上半分)したり、俯瞰表示(左下)することなどで
船体と岸壁との位置関係を視覚的にわかりやすく表示している
フルノが従来持っていた様々な技術や製品が他の最新技術と組み合わさり自動運航船実現に向けて進化を遂げていることがわかりました。
無人運航船の実証実験
エンジニア総出の一大実験
こうして"避航"や"離着岸"の自動化の技術を高めて行く中、2022年1月にプロジェクトのひとつの山場を迎えました。それは株式会社商船三井をリーダーとし、フルノを含む7社の共同で行われた"営業コンテナ船を用いた実証実験"です。これに成功すれば"世界初の無人運航船の実証実験の成功"となります。
松本さん「2020年からMEGURIプロジェクトが始まり2年、この時のために準備してきたと言っても過言ではありません。自律航行システム開発部のエンジニアは30名ほどいますが、ほぼ全員が準備に関わったと思いますね。フルノに課せられたミッションは避航判断のための認知と離着岸支援。認知は航海士の見張りの代替となり、離着岸支援は岸壁との距離などを目視する業務を代替となります」
そうして2022年1月、これらのシステムを組み込んだ内航コンテナ船「みかげ」で実証実験が行われました。航路は福井県敦賀港から鳥取県境港。離桟から着桟・係船作業までを含む港から港間を船員による操船無しで航行することに成功。見事世界初となる営業コンテナ船を用いた無人運航実験成功となりました。
「これまでの機器開発と異なり、船の機関系や陸上通信などのシステムを作っている他社さんと組み、船を自動で動かすところにみんな難しさがあったんじゃないかな」と松本さんは振り返ります。さらに1ヶ月後には北海道苫小牧港から茨城県大洗港間の約750km、昼夜をまたぐ約18時間の無人航行を実施。こちらは世界最長距離・最長時間の無人運航実証実験となりました。

松本さん「さらに2022年2月後半から3月にかけては、東京港と津松阪港間約790kmで無人運航船の実運用を模擬した実証実験を実施しました。
東京湾内は一日あたりの航行隻数が約500隻という世界屈指の海上交通過密海域です。その海域において無人運航システムによる航行を成し遂げたことは、無人運航技術の高さを証明すると共に、2025年の実用化に向けた強い推進力になると思います」

本実証実験では自律航行機能を搭載したコンテナ船「すざく」と陸上から無人運航船の運航を支援する「陸上支援センター」を衛星・地上通信回線で結び、将来の無人運航船の実運用を模擬した形で実施したとのこと。
陸上支援センターは遠隔操船機能や機関の異常予知機能などの機能を有しており、フルノでは船上の自動航行システムが陸上の支援を必要と判断した場合に、陸上から本船を遠隔操船するなど、速やかに本船の安全確保ができる非常対応システムを開発しました。


2025年の無人運航船実用化に向けて
こうして実証実験を成功で終えた次にプロジェクトが見据えている目標は2025年の無人運航船実用化です。その目標までの課題を伺いました。

松本さん「まずフルノとしては避航や離着岸技術の向上は大きなミッションですね。船舶といってもさまざまな大きさや航路、港がありますから実用化と言うならどのパターンでも成功する状態に持っていく必要があります。実証実験の成功はStage1、そして実用化はStage2と位置付けられています。Stage2では様々な船舶で実証実験を重ね、実用化できる領域を広げていくことを目指しています」
また実用化に向けた課題は技術だけではなく、国際条約に基づいた規則や国内法令の整備や無人運航船への社会的な理解を醸成していくことなど、無人運航船を取り巻く環境を作り上げていくことも求められています。
そのためStage2ではさらに参画企業が追加され、51社の事業体でプロジェクトを推進していきます。
松本さん「プロジェクトが広がりを見せる中でフルノに求められている役割も高まっています。自動運航船の実現には船側でだけでなく陸側で操船を支援する環境を構築する必要もあり、非常時に速やかに船の安全を確保できるようにしないといけません。そこでフルノはStage2でも船での認知や避航判断などの自律航行機能に加えて、陸上支援センターの開発を担当します」


自船周囲状況を3Dで俯瞰して見ることができる
遠隔操作時に中・長距離操船計画の立案を支援している
自律航行システム開発部は若いエンジニアが多く、皆アイディアを出し合い、積極的に行動してプロジェクトを推進しているとのこと。
"次の時代を担う人が次の時代のシステムを作っている"
松本さんのそんな一言が印象的でした。
航海の安全、安心につながる自動運航船の早期実現と海難事故ゼロの目標に向かって奮闘するエンジニアたち。国内様々な企業と手を組み、実証実験を重ね、実用化に向けて進んでいます。協力企業が増えたのはまさに追い風となるはずです。荒波を乗り越え、新時代の海を突き進んでいくことでしょう。
執筆:高津 みなと
- 海を未来にプロジェクト -