Inventorによる3次元機械設計手法についてのメンバーシップです。 メンバーは、Inventorのモデリングテクニックの記事を読むことができます。
Inventor モデリングテクニックに関する記事を読むことができます。
オクターブ・ラボ
Autodesk Inventor に関する話題、テクニカルな記事など
Inventorによる3次元機械設計でのモデリングテクニックに関する記事を掲載しています。
Autodesk Inventor のAPIを使ったカスタマイズ(VBA, VB.NET, iLogic など)に関する記事
Autodesk AutoCAD に関する話題、テクニカルな記事などなど
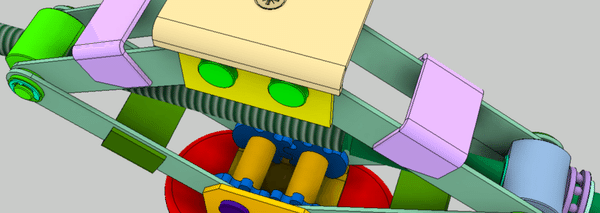
トップダウン設計手法のリアルな設計事例の第2弾です。
引き続き、構想設計の時にダイナミックシミュレーションの機能を活用する方法を説明します。 旋回装置の構想設計での活用1. アセンブリ構成 図のアセンブリモデルで説明します。どちらも、Z軸周りに旋回しますが、片方は重心を通る軸(重心軸)を中心に回転(旋回)します。もう片方は、重心と離れた軸(偏芯軸)を中心に回転します。 偏芯軸周りの方がバランス悪く、回転トルクもより必要だと、直感的にわかります。が、具体的に違いを数値で出そうとすると計算が大変です。ダイナミックシミュレーショ
引き続き、構想設計の時にダイナミックシミュレーションの機能を活用する方法を説明します。 移載装置の構想設計での活用7. 出力グラフ 出力グラフを使って、速度、駆動力などの情報を取出します。 位置 出力グラフのブラウザから、標準ジョイント→平面→位置フォルダを開きます。P[3] P[2] にチェックを入れると、図の様な位置の推移グラフが表示されます。グラフの上の数値は、時間ごとの位置を表しています。 ※ 曲線になっているのは、ジョイントプロパティの強制モーションの設定で
構想設計の時にダイナミックシミュレーションの機能を活用する方法を説明します。 移載装置の構想設計での活用ここでは、図のような重量物を移載する装置を例にします。 質量1300Kgのエンジンブロックを図のように移載(上昇、水平移動、下降)する機構を設計するという想定です。構想設計段階では、この様なおおまかな仕様をより具体的なレベルに落とし込んでいきます。 片道の行程を4秒で移載する場合、まず、上昇・移動・下降時の速度、その速度を得るために必要な駆動力を求める必要があります。
この記事では、ソフトウェアのバグや不具合について、思っている事をまとめてみました。なお、売る側の気持ちが入った文章な事は容赦ください。 ほとんどは使い方の問題 家電の不具合のほとんどは「配線」の問題と言いますが、ソフトウェアについては、ほとんどが使い方の問題です。説明をよく読んで!と突っ込みたくなります。メニューの配置が換わっただけで大騒ぎするのは大人げないです。CADの様な業務用のソフトの場合は、説明を読んだだけでは分からない事もあります。そんな場合は、声を荒げる前に、
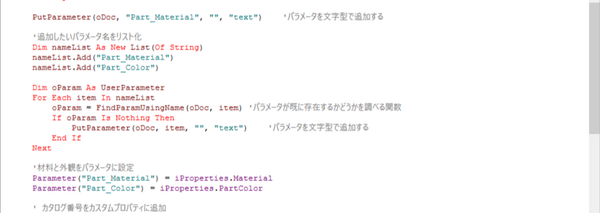
図面番号や部品名称などのプロパティ(属性)を簡単に編集する方法を紹介します。 プロパティ(iProperty) 2次元図面には表題欄があります。この表題欄に記述されている内容は図面属性などと呼ばれます。Inventorでは、iProperty というオブジェクトで表現します。 iProperty には、図面属性に相当するものがあらかじめ定義されています。それをプロパティと呼びます。プロパティをそのまま利用することをお勧めします。どうしても該当しない場合は、カスタムプロパテ
外部荷重の一種である重力について説明します。 Box and Plate重力 準備 重力の機能を確認するために、空間的ジョイントのプロパティ設定で、全ての自由度で、ジョイント荷重と強制モーションを無効(有効にするチェックを外します)にします。次に、一般タブの自由度のロックのチェックを外します。 これで、ボックスは自由に移動回転できる状態です。無重力状態です。 重力の設定 ブラウザ上の外部荷重に表示されている重力から、コンテキストメニューを表示し、「重力を定義」
実際の設計では、モデルを動かすためには、シリンダやモータといったアクチュエータを使用します。ダイナミックシミュレーションでは、それらは外部荷重として設定します。 外部荷重には、荷重とトルクがあります。また、重力も外部荷重のひとつです。 Box and Plate荷重 準備 荷重の機能を確認するために、空間的ジョイントのプロパティ設定で、全ての自由度で、ジョイント荷重と強制モーションを無効(有効にするチェックを外します)にします。次に、一般タブの自由度のロックのチェッ
練習問題 引き続き、簡単な練習問題をやってみましょう。 2方向に往復する動きに、回転を加えた動きを作ってみましょう。 ボックス形状についたボスを中心に、毎秒1回転しながら… グローバル座標のx軸、Y軸方向に移動させます。 x軸方向に、1秒間で200mm移動 y軸方向に、1秒間で200mm移動 x軸方向に、1秒間で-200mm移動 y軸方向に、1秒間で-200mm移動 という動きです。 解答例の動画です。 開始モデル 開始時のモデルはこちら 回答 回答の
Box and Plate練習問題 簡単な練習問題をやってみましょう。 前回までは、1方向(自由度1)の往復の動きを作りました。自由度を一つ増やして、2方向に往復する動きを作ってみましょう。 x軸方向に、1秒間で300mm移動 0.5秒停止 y軸方向に、1秒間で250㎜移動 0.5秒停止 x軸方向に、1秒間で-300mm移動 0.5秒停止 y軸方向に、1秒間で-250㎜移動 というサイクルです。 動画はこちら、 回答 回答のモデルはこちら
Box and Plate のアセンブリモデルを例に、ジョイントを使ったシミュレーションの方法を説明してきました。この記事では、ジョイントについてまとめてみました。 Box and Plateジョイント座標系 ジョイントを作成したときにコンポーネントに追加される座標系。ジョイント座標系は、ジョイントのモーションおよび作用力を定義するために使用します。 図の様に、Plate と Box のふたつのコンポーネントの間で、空間的ジョイントの設定を行う時、それぞれのコンポーネ
この記事はメンバーシップに加入すると読めます
空間的ジョイントの続きです。 前回は、ボックスに力を加えるシミュレーションを作成をしました。 今回は、動かす・止める というシミュレーションを説明します。 Box and PlateSTEP 7 : 動かす・止める 駆動力を与えるだけだと、どんどん加速してしまいます。これだと現実的ではありません。ブレーキに相当する機能が必要です。 また、実際の機械設計では、どんな動きをさせるのかをまず決めます。必要な駆動力を求めるのはその次です。 ダイナミックシミュレーションでは、ど
「ジョイント」は、ダイナミックシミュレーションを使う上で、とても重要な概念です。Inventorの拘束にもジョイントという機能があり、概念はよく似ていますが、違うところもあります。 Box and Plate という簡単なアセンブリを例に、一番基本のジョイントである「空間的ジョイント」を使って、ダイナミックシミュレーション (DS) の基本を説明します。 Box and PlateSTEP 1 : START 図は、ボックスとプレートの2部品のアセンブリモデルです。プ
動きのある設備・機械で、より良い設計を行うのに便利なダイナミックシミュレーションの使い方について説明します。 概要想定している読者について 動きのある機械の設計で仕様を決めるのに、以下の事で悩んだ経験はある機械設計者を対象とした記事です。 パワーのあるアクチュエータ(モータやエアシリンダなど)を使うと、購入品コストが上がる。 不用意に軽量化すると、強度・剛性に問題が生じる。 正確に力や反力・重量・剛性の計算をするには、時間が掛かる。また、その計算結果の正しさを証明で
エコシステムとは エコシステムという言葉があります。 これを機械設計で用いるツール(CADとかPDMとか)に当てはめてみると、ある時代では強力だったエコシステムが、次の時代には対応できる別のエコシステムに取って代わっていました。この事を振り返り、現在に当てはめてみたらどうなるか!という話をしたいと思います。 CAD黎明期からパソコンCAD(2D) 黎明期は、自動車OEMや造船会社など大手の自社CADの時代です。自社で開発したCADとメインフレームがつながっている程度
Inventorで、3Dモデルを表示・編集するための画面操作について、いくつかのテクニックを紹介します。