
宇宙探査テラ・メカトロニクス研究室の紹介

宇宙探査・テラ-メカトロニクス研究室(飯塚研究室)の紹介をします!
ここでは,
1.ご覧になられる方へ
2.飯塚研究室の特徴や雰囲気は?
3.学生へのインタビュー
の順で紹介させていただきます!
1. ご覧になられる方へ
みなさん,こんにちは! 飯塚研究室所属 システム理工学専攻 修士1年の石井貴大です.
何かの縁でこの記事を発見していただきありがとうございます.おそらく,進路を考えている学生の方やその親御さんなどが興味を持っていただいたのかなと思います.機械系の研究室はどんなことをしているのか,研究生活とは何かなど,いろいろと知りたいことや少し不安に思っている部分もあると思います.そこでこの記事を通して飯塚研究室のことだけでなく研究活動について少しでも理解でき,イメージが膨らめばいいなと思います.では早速,紹介していきたいと思います!!
2.飯塚研究室の特徴や雰囲気は?
飯塚研究室の特徴としては研究を通してモノづくりができることだと思います.シミュレーションや動作解析などを行う研究室ではPC画面上で多くのことが完結してしまいますが,我々の研究室では実際に実験装置を作ったり,探査車や災害救助ロボットで使用するタイヤを作ったりと手を動かして何かものを作る機会は他の研究室と比べて圧倒的に多いと感じました.何か作ってみたい,作ったものを動かしてみたいと考えている方にとっては魅力的な環境だと思います.
研究室の雰囲気ですが,お互いがお互いの強みを生かして助け合う文化があるように感じます.どうしても研究をしていると思うように進まないことがありますが,その際に先輩や同学年の仲間,たまには後輩からアドバイスやヒントをもらい,行き詰っていた状況から脱出できたなんてことがよくあります. また,ほかの分野を研究している人とも話す機会があるので自分の研究分野以外のことも知ることができてとても楽しいです.
では, 研究分野について紹介していきたいと思います.
飯塚研究室では月面探査系,農業系,災害救助ロボット系と主にこの3分野について研究を行っています.
月面探査系は主に月面探査機構周辺の研究をしています.月面環境はレゴリスと呼ばれる非常に細かい砂でできた軟弱地盤となっており,車輪がスリップしたり砂面に沈下してしまったりして身動きができなくなるスタックという現象が発生してしまうことが想定されます.そこで本研究室では走破性の高い車輪形状や移動方法の研究を行ってきました.困難な環境を想定しているため難しいこともありますが,今後発展していく宇宙開発分野に関わっているというワクワク感を持ちながら各々が研究に取り組んでいるように見受けられます.
次に,災害救助ロボット系の研究について紹介します.
災害救助ロボット系の研究テーマは主に被災地での不整地盤環境で走行性能を維持する空気を用いずにタイヤの硬さを変更できる車輪の開発と走行性能の向上を目指しています.災害が頻発する日本では,災害直後の救助活動が非常に重要となります.災害現場の地盤環境は,瓦礫や泥,砂といった不整地盤であり,通常の車輪を用いたレスキューロボットでは走行効率が悪く,救助に多くの時間が費やされるという課題があります.それらの課題を解決するために,日々研究に取り組んでいます.

最後に農業系の研究について紹介します.
農業グループでは,畦畔用の草刈りロボットに関する研究を実際に製品化することを目指して行っております.畦畔走行時に横滑りを抑制するためにハード面とソフト面の両方からアプローチをしています.ハード面では,アウトリガーアームという特殊な機構を取り付け,その効果を検証しています.ソフト面では,ドローンからの撮影された映像をもとに,横滑りを検知するとドローンからロボットへ横滑りを知らせるシステムを考えています.これらを組み合わせることで、人の手を介さず,自動で直進走行しながら草刈りができるロボットを目指して,日本の農業を救っていきたいと考えています.

3.学生へのインタビュー
飯塚研究室では各研究分野ごとにコンソと呼ばれる研究を共有する集まりがあります. これから各コンソグループのインタビュー記事を紹介したいと思います!研究室のイメージが膨らむと思います!
◎月面探査系
PPL
・研究内容
私達のコンソでは月面の安定した走行手法の提案を行っています.月面では細かい砂が堆積したレゴリスと呼ばれる砂で覆われていることや,斜度の高い斜面が広がっています.これにより車輪が砂面に沈下して動けなくなってしまうことが想定されます.この課題の解決法として,PPL(Push-Pull Locomotion)機構に着目し研究を行っています.PPLとは尺取り虫のような伸縮動作を挟んで走行する方法です.PPLを行うことで地盤から機体を支える力が増加し,安定した走行が可能になります.そこで,私達の研究グループではPPLを利用した斜面登坂・斜面横断・運搬などの観点に着目し研究を行っています.
・コンソのポリシー
主に小型ローバと大型ローバの2つの班に分かれています.それぞれの班で毎週一回コンソ内で集まり,お互いに課題や改善策について議論を行っています.異なる視点で物事を考え共有することで効率的な解決策を見つけることが可能であると考えているため,積極的な意見交換を行っています.
・楽しかったこと
自分自身でマイコンにプログラムを書き込み,3Dプリンタで作成したローバが初めて動いたときです.研究室に入る以前は全くマイコンや3Dプリンタに触ることがなかったので,初めて作成したローバが動いた瞬間はとても嬉しかったです.新しいことが一つ一つ増えていくことは大きな自信に繋がりました.初めてのことにも恐れることなく取り組むことが大切だと思います.
・苦労したこと
実験において必ずしも想定した効果が出ないことです.新たな手法の提案を行い,プログラムを書き,3Dプリンタで新しいローバ作成したとしても先行研究で開発されたローバよりも良い結果が得られるとは限りません.良い結果が得られなかった場合は,データを分析した上で,結果が出るまで繰り返さなければいけません.望んだ結果がでなくとも,何度も諦めずに挑戦することが大切だと思います.


◎内部深覚系
・研究内容
内部深覚班は,スリップやスタックの予測,検知を研究のテーマとして扱っています.月面などの軟弱な斜面においては,登坂,横断に関わらず高い精度で姿勢変化を捉える必要があり,視覚的制御と慣性計測による制御などでは不十分な現状があります.そこで,本研究班では地盤と車輪の作用によって,ローバの脚部に発生するひずみを読み解くことでスリップ,スタック現象を力学的,直接的に捉え,安定した走行ができるようにするためのシステムを実現すべく,日々研究を行っています.
・コンソのポリシー
我々のコンソは皆が同じ研究目的を持っています.このため,研究活動における一人一人の課題点や悩みはコンソ全体の問題でもあります.そこで週に1回集まって,どんなに些細な課題点でも全て共有し,コンソで考えて解決するようにしています.
・苦労したこと,楽しかったこと
ローバでの実験,単輪試験機での実験ともに,持ち運んだり部品の付け替え作業があったりと,重いものを持ち運ぶ体力仕事が意外にも多いことが大変です.また,場合によってはひずみデータがうまく取得できていないことがあるほか,ひずみデータを用いた解析の最適解が見つかっておらず,模索中であることにも苦労しています.
しかし,このような苦労の先には,回路やデータシートを読む力がつき,データの不具合に対処できるようになったり,学会やポスター発表で,他の人に研究に興味を持ってもらえるという嬉しい一面もあります.
◎掘削系
・研究内容
私たちの研究では,月面での掘削を目指した掘削方法の提案を行っています.月面に堆積するレゴリスがあり,このレゴリスは深度に相関して密度が上昇し掘削機に生じる掘削抵抗の増加が想定されます.この課題を解決するため,車輪状の回転機構によって砂を削り出し掘削を行う手法に着目して研究を行っています.回転機構を用いた掘削は,ドリル掘削などに比べ抵抗を減らした掘削が出来ると考えられます.そこで私たちの研究では,初めに回転機構による掘削量に着目し研究を行っています.
・コンソのポリシー
4Dマップ班において毎週一回コンソ内で集まり,進捗から課題や改善策の議論を行います.
・楽しかったこと
プログラム,設計を行い,3Dプリンターで制作した掘削機が掘削を行えたときです.試作機を何個も作成する中で実機が砂をきれいに掘り進めた時は感動しました.
・苦労したこと
砂の掘削機を制作するにあたり、モータの干渉やモータの防塵が課題としてありました.実機が完成し何度か実験を行うとモータが砂によって破損し修理に大きな時間が取られました.

◎デジタルマップ系
・研究内容
近年世界中で,生命や水の発見・惑星の起源の解明のため様々な手法で惑星探査が行われています.惑星探査の手法の一つに惑星表面での自律移動ロボットを用いた探査があります.レゴリスと呼ばれる砂で覆われている惑星表面をロボットが走行する際は,しばしばスリップを起こしたりタイヤがスタックしてしまったりすることがあります.そこで走行時にロボットの脚部に生じる振動を解析することによってスリップやスタックを検知・予測し,より安全な自律移動を実現するための研究です.
・コンソのポリシー
研究グループには所属し,研究の方針や課題について話し合います.しかし,ハードウェアをメインで扱う環境の中でソフトウェアを扱うため,独学で必要な技術を学び続けなければいけません.そのためディスカッションに参加しつつ勉強を続けることが重要です.
・楽しかったこと
プログラムが動いた瞬間や解決策を実際のプログラムに落とし込む設計の段階です.
・苦労したこと
エラーが解消されず,他の手法を検討するかどうかを考えているときです.

◎海底探査・バイオミメティクス系
・研究内容
本グループでは,海底探査のためのロボットの機構の設計や開発,また生物の機能や構造などを模擬した移動探査ロボットの研究を行っています.
具体的な研究内容を説明します.
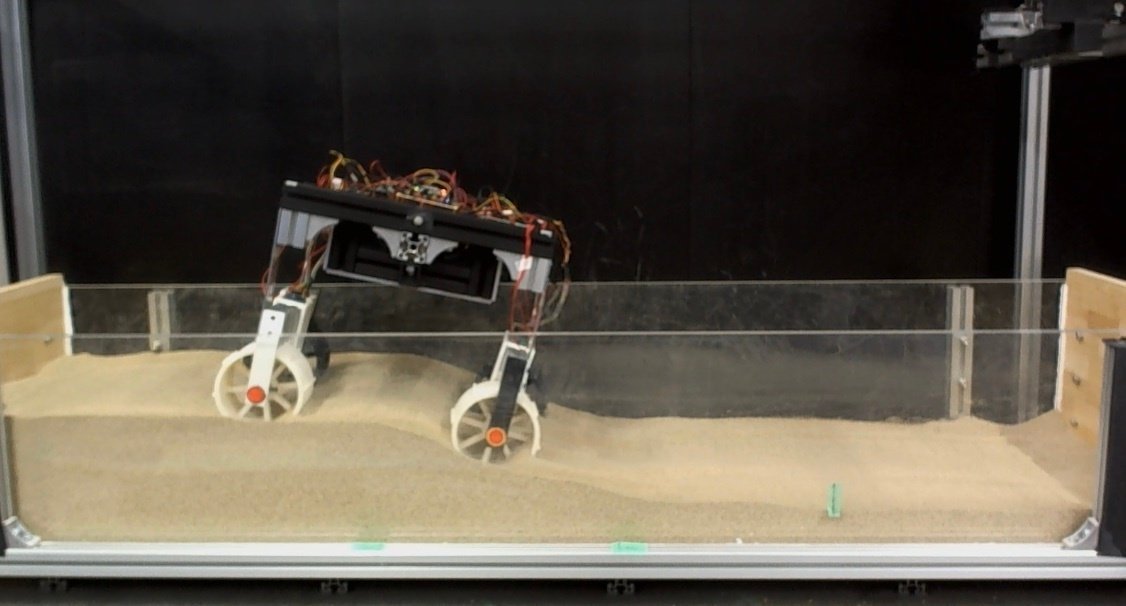
海中探査ロボット
海底の直接探査を想定した車輪型ロボットの走行実験の様子です.研究や養殖のための海底生物生態観察・調査を目的に,海底の軟弱地盤で走行できるロボットを開発しています.

ホタテ貝型ロボットの遊泳実験の様子です.藻場の観察を目的に,ホタテの遊泳方法を参考にしたロボットを開発し研究を行っています.

月"地中"探査ロボット
月面の軟弱地盤・レゴリス地中を移動することを目的に,砂漠に生息するサンドフィッシュスキンクという生物を模したロボットを開発し研究しています.

振動脚を利用した月探査ロボット
月面斜面などの移動性能向上を目的とした脚を振動させる機能を付与した脚型ロボットについて,解析ソフトによるシミュレーションなどを交えて研究しています.画像は,シミュレーションの結果,振動により支持力が増加したことを示します.

・コンソのポリシー
週に一回のゼミはパワポを用いた形式で進捗を共有しお互いに質問しあうという実践的な発表形式で,発表や質疑応答に慣れることができます.雑多な研究内容が集まったコンソですが,研究に詰まった時には相談しあうことで.様々な視点から解決の糸口を見つけることができます.
・苦労したこと,楽しかったこと
水中や砂中で動くロボットを作成するにあたり,モータの防水や防塵が実験中の大きな課題です.研究内容に大きく関係する部分ではないですが,防水・防塵に失敗してしまうと実験が進まず,かなり時間がとられてしまいます.関連研究を参考にしながら試行錯誤し,ロボットが正常に動いた時には感動しました.
◎農業問題解決ロボット系
アグリ
・研究内容
私たちアグリ班では畦畔と呼ばれる水田の周りにある急斜面でも草刈りができる草刈りロボットについて取り組んでいます.急斜面でも作業が問題なくできるロボットにおける課題の一つに,「横滑り」と呼ばれる急斜面で移動しようとすると斜面谷側に滑ってしまう現象が挙げられます.この横滑りのせいで機体の転倒や畦畔を傷つけたりしてしまうため,横滑り抑制できる方法が求められています.
この課題に対して,アグリ班では世界で初めての機構である「アウトリガーアーム」を提案しました。アウトリガーアームとは、リニアアクチュエータの先端に車輪をつけた脚車輪です.これを草刈りロボットの側面に搭載することにより,横滑りを抑えながらの急斜面の除草を実現させています.また,「シャクトリムシ機構」と名付けられたロボットを地面に固定して進むことのできる機構を搭載するなど様々なアプローチでこの課題に取り組んでいます.


・コンソのポリシー
私たちのコンソでは,コンソメンバーで相互に協力し合いながら研究を行っています.毎週行っているコンソでは,研究の方針や現状の課題について活発に議論を行い,最適解を見出す努力をしています.また,日々の研究活動で疑問や小さな課題が見つかった際にはすぐ相談することや,実験の際には互いに手伝い合うことにより効率的な研究を行えるようにしています.

・楽しかったこと
この研究で最も楽しかったことは,ロボットの設計・製作です.ハードウェアからソフトウェアを一から考えて設計・製作してきました.最初はほとんど知識がない状態で不安でしたが,飯塚研は何度失敗しようとも先生や同期,先輩方に気軽に相談ができる環境だったため,悩みや失敗を一人で抱え込みつづけることなく研究できました.そして,何度も失敗しながらも試行錯誤を重ねた結果,自分たちで設計・製作したロボットを制御できたときは非常に感動しました.
・苦労したこと
この研究で最も苦労したことは,ロボットの設計・製作です.設計・製作の過程で,機体が壊れたり回路が燃えたりなど何度も何度も失敗を繰り返してしまいました.研究する前はなんやかんや上手くいくだろうと楽観的に考えていた部分がありましたが,現実は挫折だらけでした.しかし,この挫折は周りに相談することの重要性を学びました.失敗を繰り返した後に相談することは怖いことかもしれませんが,勇気をだして失敗を周りと共有し,経験として蓄えていくことが大切だと思います.
◎災害レスキュ用トランスフォーム車輪系
・研究内容
デブリ班
土砂災害などの災害現場を想定した不整地上で高い走行性能を発揮するための手段として,車輪のトレッドの柔軟性に 着目しています.デブリ含有軟弱地盤(小さな礫が多数混じった軟弱地盤)において,デブリ(=小さな礫)の回転や流動を抑制することが確認でき,不整地上の走行性能向上に貢献しています.
※トランスフォーム車輪とはずれているが,その車輪が持つトレッドの柔軟性とデブリ含有軟弱地盤という研究例の少ない環境での実用性を確認した研究でもあります.
またもう少しサイズの大きなデブリを想定したデブリ乗り越えに関する研究も実施しています.剛体地盤または軟弱地盤上にデブリを設置し,デブリの回転を抑制して車輪が乗り越えるかを検証しています.
可変剛性班
災害現場や農業現場の路面は不整地であり,そこを走行する車両の車輪のスリップ・スタックが課題となっています.現場までの路面はアスファルトやコンクリートなどの硬い地盤のため,高空気圧タイヤのような走行効率の良い硬い車輪が必要です.しかし不整地上では車輪がスリップ・スタックしやすい状況であり,それを打破するために地面との車輪の接触面積を増加させて地盤崩壊を防ぐ柔らかい車輪が提案されました.この2つの地盤に対応した車輪として硬いモードと柔らかいモードの切り替えが可能な「空気レス可変剛性車輪」が開発されました.現在はこの車輪の柔軟性に加え,さらにスリップを抑制するために回転軸の位置の移動によるトラクションの獲得や,柔軟車輪にラグを搭載した斜面登坂などに着目して実験を実施しています.
・コンソのポリシー
トランスフォーム車輪グループにはさらに二つのグループに分かれており,毎週互いのグループの進捗や新規手法の提案,実験結果の共有をとるうえで重要な場面.災害対策をはじめとする社会課題を解決するためのブレーンストーミングを中心に話し合います.
※トランスフォーム車輪の前駆者である「空気レス可変剛性車輪」の実用性にかかわる研究グループと,デブリ対策を中心に論じる研究グループに分かれています.
・楽しかったこと
実験で仮説が立証された瞬間やデブリ対策などの手法提案・プロトタイプ製作などです.さらに得られた実験結果からなぜそうなったかの理論的な考察や機構を考えたり,可変剛性車輪のモード変化の仕組みを知ったりする場面は,研究のやりがいを感じる瞬間は感動します.
・苦労したこと
実験環境の整備や実験ごとの車輪の移動速度の算出や統計作業などに時間が割かれることです.また車重負荷や牽引負荷,斜度,車輪の種類などの多くの実験条件が必要であり,それに試行回数を考慮すると実験回数が非常に多くなり,車輪を地盤から離したり,整地したりする作業が大変です.(全自動単輪試験機があると負担が減るかもしれません.)


○芝浦工業大学機械制御システム学科にご興味ある高校生のみなさん
わたしたちは, 自由な発想のもと, 世界にはない唯一のものを研究テーマとして日々活動しており, 大変なことも多いですが, とても充実した大学生活を送っています. よかったらぜひとも見学・遊びにいらして下さい!
○この記事を見てくださった皆様
本研究室の記事に目を止めてくださってありがとうございました. とにかく面白いことをしようという研究室です. その一方でみんな全力でがんばっている研究室でもあります. ぜひとも芝浦工業大学機械制御システム学科をよろしくお願いいたします!!!
この記事が気に入ったらサポートをしてみませんか?