
自然が相手だからこそ面白い。AIロボットでイチゴの全自動栽培へ。|HarvestX

「スマート農業」や「アグリテック」(農業「Agriculture」と技術「Technology」の造語)と呼ばれる、農業にロボットやAI、IoTなどのテクノロジーを取り入れた新しい生産方法が国内でも普及しつつあります。
中でも植物工場で生産された葉物野菜は、大手コンビニチェーンなどで販売されている"カット野菜"として消費者にも身近な存在となっています。
今回はDMM.make AKIBAが提供するインセプションプログラム「スタートライン」のメンバーでイチゴの全自動栽培に挑む「HarvestX(ハーベストエックス)」にこれまでの活動と未来について伺いました。
▼スタートラインについて▼
▼HarvestXについて▼
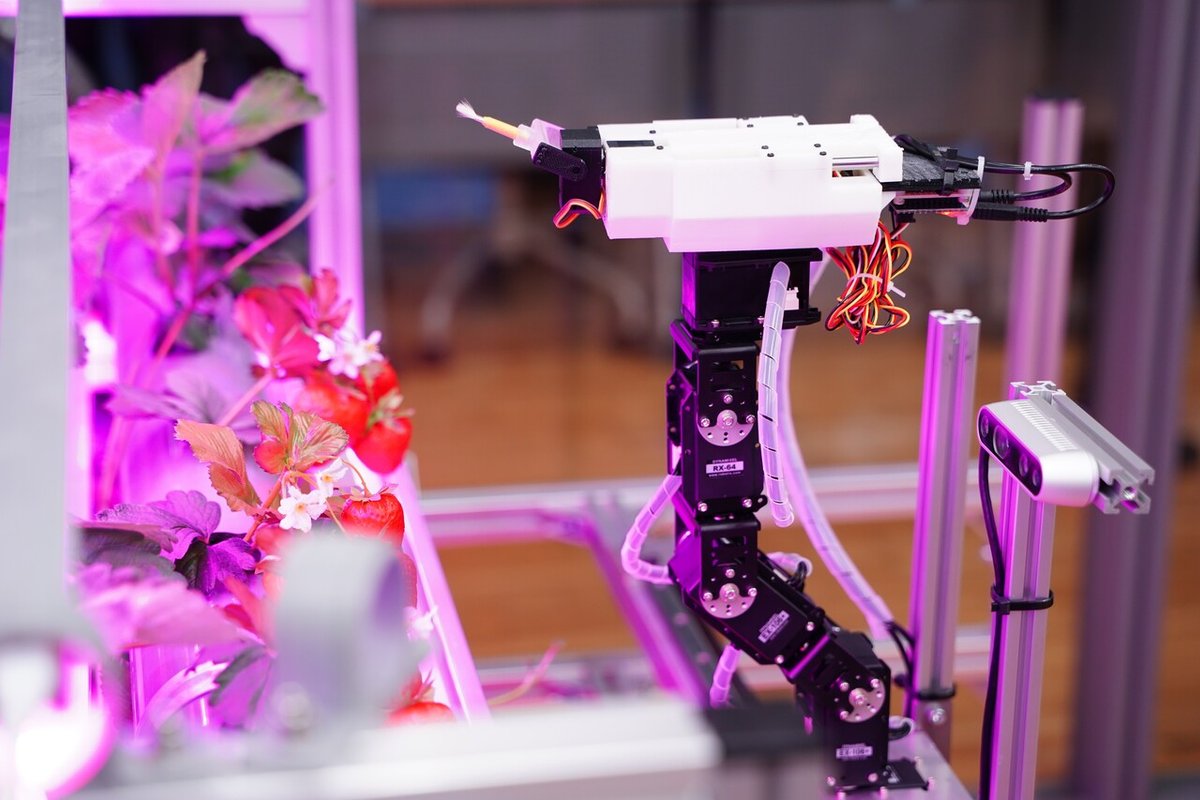
HarvestXは受粉から収穫までの工程を全自動化させる農園向けロボットを開発する東大発スタートアップです。
HarvestXは収穫だけでなく受粉もロボット化し安定的な生産の実現に挑戦しています。
▼現在開発を進めているロボット

イチゴ栽培の課題は収穫ではなく"受粉"だった。

市川 友貴(いちかわ・ゆうき)さん
HarvestX 株式会社 / 代表取締役 *写真右
渡邉 碧為(わたなべ・あおい)さん
HarvestX 株式会社 / 取締役 *写真左
[HarvestX・市川さん]
「私は元々ロボット開発が得意で、受託開発で色々なプロジェクトに関わっていましたが、特にやりたいことが決まっていたわけではありませんでした。
そんな中、2018年の春、大学の関係で農業用の組み込み機器を開発することになり、初めて農業に携わりました。
このとき、日本の農業従事者の減少や食料自給率など、農業が抱える課題を自分の技術で解決できないか、と考えるようになったことが現在の事業に繋がっています。
さっそく2018年12月、現・取締役の服部とプロジェクトを開始しました。ビジネス化を見通して、年間を通して需要があり高単価なイチゴの栽培から着手しました。
2019年2月まで都市部の空きスペースを有効活用するユニット型の植物工場を作っていました。

箱の中は温度管理ができるようになっていて、赤く実ったイチゴをカメラが捉えると画像処理で認識し、ロボットアームが収穫するという小さな植物工場でした。
この頃、植物工場や食品加工会社へヒアリングするようになり、収穫よりも受粉に課題が残っていることを知りました。」
植物工場でミツバチに受粉させる難しさ。

[HarvestX・市川さん]
「レタスやバジルなどの葉物野菜と異なり、トマトやイチゴなどの果菜類は受粉が必要不可欠です。
通常、自然界ではミツバチ が花粉を運ぶか風の力で受粉します。一般的に上手くいっている農園でも受粉の成功率は5〜8割と言われています。
植物工場でミツバチ を放し飼いにしたり、人が筆を使って一つ一つ受粉させたりしている農園もありますが、コスト面で大きな課題があります。
閉鎖的な工場内だと日光の不足や狭い空間でのストレスにより、ミツバチが飛んでくれなかったり、すぐに死んでしまったりするため、ただでさえ減少傾向にあるミツバチ を頻繁に調達しなければならず大きなコストがかかります。
人の手で行う場合はもちろん人件費と膨大な手間暇がかかっています。
さらに、せっかく無菌状態で人間がコントロールできる植物工場にミツバチ を放つことで、病原菌を持ち込むなどコントロールできない状態になってしまいます。
私たちはこの不確定な要素をロボティクスで解決しミツバチ の受粉率を超えたいと思っています。」
ロボットで農家の受粉作業を自動化する。
[HarvestX・市川さん]
「受粉が課題だとわかったので、2つ目のプロトタイプでは収穫に加えて受粉も自動化するロボットを開発しました。
先述の通り、筆を使って人の手で受粉させている農家もいます。これをロボット化したんです。研究機関では超音波で振動させたり花粉を噴射させたりしている方法もありますが、技術的に実現しやすい方法を取りました。
受粉ができるようになっただけでなく、栽培方法を土壌栽培から水耕栽培に変更しました。
さらに、この頃に渡邉がジョインしてきたおかげで収穫時に茎を切ってホールドするハサミとアームを一体型にすることができました。」
▼改良したアーム部分

[HarvestX・渡邉さん]
「初号機ではハサミとアームがそれぞれ存在していたのでモーターも2つ必要でした。
アームの内側をスポンジのような柔らかい素材にすることで、握ったときにスポンジが変形し、ある程度握ると内側からハサミの刃が出てきて茎を切るという構造です。
HarvestXにジョインする前に、国際ロボット展でクレープを自動で焼き上げるロボットを出展していました。そのときに開発していたクリームの缶を握る動作の機構がここに活かされました。
さらに、機械的な機構が似ていたので受粉用の筆もアタッチメントを交換するだけで済むようにすることができました。
このプロトタイプで『Todai To Texas 2020』に応募しDemo Day Awardを受賞。『サウス・バイ・サウスウェスト(SXSW)』に出展予定でしたが、新型コロナウイルスの影響で中止になってしまい、渡米することができなくなってしまいました。」
[HarvestX・市川さん]
「この頃、DMM.make AKIBAで出会った半導体商社の三信電気株式会社からarmマイコンやToFセンサーの評価ボードを提供していただけることになりました。量産フェーズになったときの心強いパートナーです。
▼DMM.make AKIBAで三信電気の担当者と記念撮影

経済産業省「未踏事業」に採択されて支援を受けて開発していましたが、「未踏IT人材発掘・育成事業スーパークリエータ」にも認定していただくことができました。」
AIで花と果実の収穫時期を判別する。
[HarvestX・市川さん]
「初号機では赤い実を画像処理で判別して収穫するという単純な仕組みでしたが、2号機からはAIで花と果実の状態を判別して受粉と収穫を行っています。
▼下がロボットで受粉して実ったイチゴ。上の黒っぽい実は自然に受粉された。綺麗に受粉しないと美しい色や形にはならない。

イチゴ狩りに出かけてはイチゴの写真を大量に撮ってAIに食べられるイチゴを学習させています。HarvestXは福利厚生がイチゴ狩りなんです(笑)
導入された農園の環境や日光の当たり具合によってイチゴの検出に影響が出ないように、ディープラーニングによって色々な環境で収穫期を正しく検出できるようにしています。
さらに、AIがイチゴであると判断したデータに対して色相を利用した成熟度の判定のアルゴリズムを組むことで、美味しいイチゴを見分けられるようにしています。
農家に導入された際は生産者が収穫する成熟度を指定して適切なタイミングで収穫できるようになります。
花も同じようにディープラーニングで学習させて判別しています。

順調に開発が進み、2020年10月にはレール駆動型のロボットが完成しました。これは大規模な農園で実証実験をすることを想定して製作されています。
来年夏以降にこのレール駆動型の初号機を共同研究としてリリースすることを目指しています。」
唯一無二の自然を相手にするからこそ面白い。
[HarvestX・市川さん]
「イチゴに限らず自然を相手にするテクノロジーは、技術者として難しくもあり魅力的だと感じています。
一つとして決まった形、色、大きさが存在しないものをコンピュータで認識させる面白さ。決定論的でないものこそ今後の課題になっていくと思います。
2020年、東大IPC 1stRoundに採択され、支援を受けながら8月に法人化しました。
▼写真右が取締役・服部さん

今年は総務省『異能vation』にも採択され、1月には初めて資金調達を発表しました。ますます実証化に向けて加速していきます。」
[HarvestX・渡邉さん]
「私たちはロボット技術で農業の人材不足の解消や安定的な生産を実現させることをミッションとして活動しています。
新型コロナウイルスの影響で世界的に輸出入に遅れがでるなど、食料自給率は世界的な問題になっています。
さらに、気候の影響でこれまで国内で生産できなかった植物も、植物工場で生産できるようになっていきます。
私たちのロボットとAIの技術でこれらを実現していきたいと思っています。
今後はトマトやメロンなど他の果菜類にも挑戦してく予定です。実証実験や協業できる食品メーカー、植物工場の関連会社、農学系の研究機関の方を探しています。ぜひお気軽にお問い合わせください。」
さいごに。
DMM.make AKIBAではスタートアップから大企業まで様々な企業やクリエイターが活動しています。
プランや機材についてなど、お気軽にお問い合わせください。
無料施設見学ツアーを開催しています。ぜひご参加ください。
また、公式noteではマガジン「STARTUPS」「MAKERS」にて会員の皆さまの投稿を読むことができます。ぜひこちらもご覧ください。