
再現性のあるスプリントとは。 ~メッシ・ロナウド・山縣亮太~

今月よりfcpsols有料マガジンが発足されてからの記事第1弾ですので気合を入れて書いていきたいと思います。
先月sunnyさんのネイマールのfMRIを考察した記事よりネイマールはトップダウンで制御を行っており、非常に効率的な運動制御をしていることがわかりました。
トップダウン式の運動制御は動きに無駄がなく、再現性がある。
そこでスポーツの中で最も使われる走りでも運動制御からみて無駄がなく、再現性のあるものは何かを考えていきたいと思います。
▼まず始めに
まずこの3選手の動画を見てみましょう。
メッシ
ロナウド
山縣亮太
皆さんはこの3選手の動画からどんなイメージを持ちますか?
上記2選手はサッカーをやっている方ならもちろん知っているスーパースターですよね。この2選手のプレーを思い浮かべるとき、何となく動かし方に一貫性があり動きの特徴をイメージしやすいかと思います。
メッシに関しての私のイメージは腕をちょこまか動かし、膝下がすごく動いているイメージを浮かべました。
ロナウドに関しては姿勢がとにかく綺麗で体幹が動かず安定している、膝下や腕の振りが特徴的だなというイメージを思い浮かべました。
この2選手はゴール数も他の選手よりも抜きんでており、一貫したパフォーマンスを発揮している。この常に一定のハイパフォーマンスを続ける裏には動きの中で最も基礎に当たる、走りに再現性があるのではないかと考えます。
また、2選手のスプリント姿勢とドリブル姿勢は非常に類似しています。
このあたりにも何か秘密があるのかもしれませんね。
そしてもう1選手はサッカーではなく、陸上100mを10.00秒で走る山縣亮太選手です。
この選手のすごいところはコンスタントに10.0台を連発できることにあります。このコンスタントに10.0台の走りができるには毎レース同じパフォーマンスを発揮していることになり、再現性のあるスプリントを考える上でヒントになるのではないかと思います。
このようなどんな時もハイパフォーマンスな動きを見せる3選手を神経制御の観点から見ていきたいと思います。
そもそも再現性のある動きとは何でしょうか?
まず、再現性のあるとは意図した動きを含むというよりも自動化した動きを多分に含んでいた方が有効のように思います。
⓵意図した神経の制御に要する力発揮までの時間と⓶自動化した神経の制御(不随意)に要する力発揮までの時間や単純に⓷バネの力(弾性力)が要するまでの時間を考えたときに⓶、⓷の方が働き始めるまでの時間や再現性の意味では有効なように感じます。
ということで神経制御に注目して今回は記事を進めていこうと思います。
▼スプリントの前提
まず走りとは何かを考えていきたいと思います。
走るとは自分の身体をより前に進める行為と言えます。
そして前に進むためには左右の足へ重心移動を行いながら足に対して身体を乗り込んでいく作業でもあります。
ほそのさんのnoteにも書いてありますが、
走るとは、左右への重心移動、両足が地面から離れる瞬間がある。
また走りは片脚だけに体重が乗り込む時間があり、落ちて弾むのジャンプの連続であるといえます。
⓵高い重心位置からスムーズに重心移動する
②落ちて弾むバネを使うこと
③弾むリズムに合わせてタイミングをとる
が走る上で最も土台で0番目のスキルであるとほそのさんは表現しています。
この表現はとても自分の中でしっくりきたので使わせていただきます。
その0番目のスキルのに上にあらゆる技術がが乗ってくると考えるのが良いと思います。
▼スプリントの動力
走るという行為はどんなエネルギーを使っているのか。
走るとは前に進む行為です。
そのためには先程述べた落ちて、弾むことがエネルギーになってくると考えます。
エネルギーには位置エネルギーと運動エネルギーが存在します。

位置エネルギー:身体が下に落ちる力。
運動エネルギー:バネの弾む力、筋の収縮で伸びる力。
つまり落ちる力と伸びる(弾む)力により身体を前方(水平方向)へと進める。
▼神経制御

運動制御は大脳皮質、大脳基底核、脳幹、小脳、脊髄より行われる。
▼脊髄運動中枢

各脊髄節に比較的少数の介在ニューロン群と運動ニューロン群からなる神経回路で不随意的に反応をおこします。
・CPG(Central Pattern Generator)
歩行や走行のようなリズム運動には脊髄運動中枢の関与が大事であり、脊髄にはCentral pattern generatorというリズム形成機構が存在します。
猫や犬の脊髄を上位中枢から切り離した後でも後肢に屈筋ー伸筋の周期的な筋活動とステッピング運動が発現することは良く知られている。
これを実現しているのがCPGと言えます。
大部分の四足動物は四肢をリズミックに伸展屈曲することによって歩いたり走ったりします。
CPGは上位中枢と脊髄運動ニューロンの中間に存在し、歩行や走行運動の基本となる屈筋・伸筋間の周期的な運動出力を脊髄運動ニューロンに与えています。
CPGのモデルとしてhalf center仮説というものがあります。

図中のEHC,FHCはそれぞれ伸筋と屈筋への指令をつかさどる介在ニューロンで相互に抑制結合をもつことで屈伸の交互運動を作り出しています。さらにFHC同士も相互性抑制を持っているので左右の体肢間の周期的な運動出力も調整しています。
CPGは「感覚入力や上位中枢からの神経指令なしに周期的な運動パターンを生成する神経回路」と定義されるが実際は歩行・走行運動制御には感覚情報が重要な役割を果たすことが明らかにされています。
なかでも筋紡錘からの感覚情報の貢献度は大きく、歩行中に絶えず変化する筋の長さと張力を感知し、脊髄のみならず上位中枢に末梢の状況を伝達することで運動制御のための有効な情報が活用されます。
歩行・走行に参加する多数の関節のうち、股関節の動作とそれに伴う感覚情報はCPGの活動に大きく影響を与えます。
立脚後半に股関節が伸展される際の筋紡錘からの求心性情報は遊脚期への位相転換を担う股関節屈筋の活動を喚起する。
また、関節運動に伴う筋紡錘からの入力はFHC,荷重の入力はEHCに選択的な神経連絡を持ち運動の調整に貢献している。
これらよりCPGの出現にはゴルジ腱器官からの荷重情報、関節運動に伴う筋紡錘からの情報が必要です。
・固有受容器反射回路
筋紡錘、ゴルジ腱器官、静的・動的γ運動ニューロンが関与する固有反射群があります。
筋紡錘は筋の長さのセンサー
腱器官は筋張力のセンサー
こういった反射系統は脊髄レベルで処理されるため脳を介した制御よりも速く力発揮を行うことが可能となります。
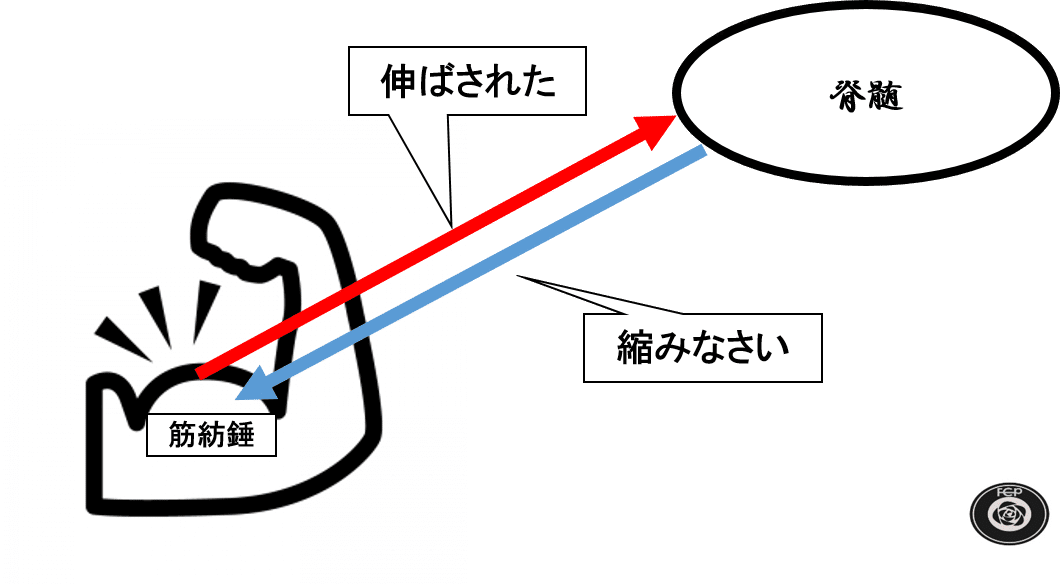
伸張反射:筋肉の中にある筋紡錘が伸張されることで脊髄より収縮命令が出され筋が収縮する反応。
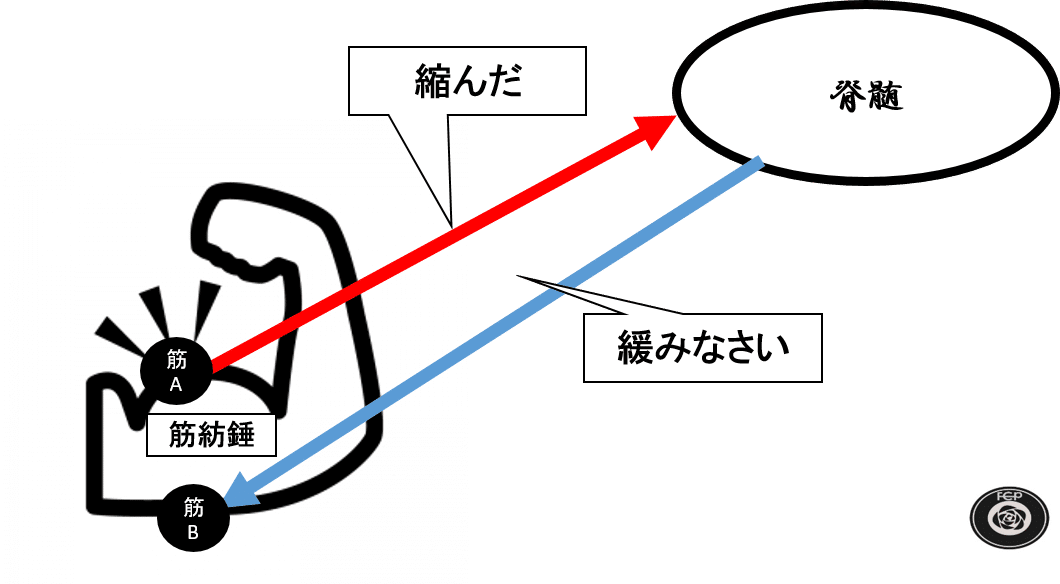
Ⅰa抑制:主動作筋を収縮させることで筋紡錘からのⅠa繊維が抑制性介在ニューロンを介して拮抗筋の運動ニューロンに抑制的に働く
反回抑制:主動作筋が収縮した際に、主動作筋及び同じ神経で支配される筋には抑制的に働き、拮抗筋には促通的に働く。

Ⅰb抑制:ゴルジ腱器官伸張刺激によって、求心性のⅠb繊維が抑制的に作用する。

▼脳幹運動中枢

脳幹は中脳・橋・延髄より構成されます。
人が進化の過程で陸上生活をするにあたり、重力に逆らって重心を高く維持・保ち移動(歩行や走行)する必要がある。
そこで必要になる全身の抗重力筋群の共同した興奮を引き起こす装置、神経回路が橋・延髄には存在する。
感覚入力を用いて、この装置が制御することにより歩行や走行の高い重心位置が実現される。
陸上での姿勢と運動を制御するということは外界と接触する身体部位を支点として重力軸に対して身体配置を定めることである。
そのためには身体と重力軸の関係や外界と身体の関係を知ることが重要である。
身体と重力の関係は内耳の耳石器と頚部固有受容器によって知る。
内耳の耳石器と頚部固有受容器の感覚入力はそれぞれ、緊張性迷路反射と緊張性頸反射を引き起こす。
緊張性迷路反射は仰臥位のとき抗重力筋群の緊張は最大になり、腹臥位では最小となる。
緊張性頸反射は体幹に対して頭部を屈曲させるとき、足は進展して手は屈曲する。体幹に対して頭部を伸展させると足は屈曲して、手は伸展する。
また、頭部を体幹に対して長軸周りに回転させると顎先が向いた側の手足が進展して対側が屈曲する反応が見られる。
緊張性迷路反射も頸反射も抗重力筋群の筋緊張を発生する神経経路に重畳し、抗重力筋群の筋緊張のバランスを調整している。
橋・延髄は脊髄運動中枢の上位中枢であり、どの脊髄運動中枢が働けば良いのか(空間パターン)、いつ働けばいいか(時間パターン)、どの程度働けばいいか(活動の大きさ)などを指示する。
中でも網様体脊髄路は重要であり、CPGの促通、四肢の屈曲伸展の制御、四肢間協調の制御など多岐にわたって関わっている。
脳幹から起始する神経経路を総称して内側運動制御系(大脳皮質より投射される前皮質脊髄路を除く)といわれています。
内側運動制御系は錐体外路系(不随意な運動)であり、上記の緊張性迷路反射、頸反射に加えて伸張反射や屈曲反射、前庭眼反射、立ち直り反射などの姿勢反射に関与しています。
また、内側運動制御は両側頭頚部、両側体幹筋や近位伸筋群の運動に関与する。

▼大脳皮質運動中枢

人など高等哺乳類において大脳皮質運動野は皮質脊髄路、皮質網様体路を介して随意運動、意図した動作の指令を出力します。
大脳皮質より起始する指令に外側運動制御系と言われるものがあります。
外側皮質脊髄路は錐体路であり随意的な運動を制御する。
外側運動制御の主役であり、対側特に手・足の遠位筋による運動を制御する。

今まで説明してきた神経制御系は意図した神経制御(随意的)と自動化した神経制御(不随意的)に分けることができます。
運動は体幹や上下肢の近位筋による姿勢制御と手指の遠位筋を用いる精緻運動に分けられる。
前者はいわゆる自動化した制御、後者は意図した制御です。
スプリント、走るという行為においても自動化した動きと意図した動きが存在する。
フラン・ボッシュが提唱するアトラクターとフラクチュエイターのようなものと考えていただければと思います。
図からもわかるように近位部はより自動化され、遠位は調節機能として働くのがベストと言えます。

再現性のあるスプリントは自動化した内側運動制御や反射系統、リズム形成をするCPGをうまく使い、近位を安定化した動きを実現したものではないかと思います。つまり、脳幹から起始する内側運動制御系の賦活、CPGや反射系統の促進がカギになってくるのではと考えます。
▼再現性のあるスプリントの条件
山縣亮太
スタートの際は位置エネルギーを使用した落下のエネルギーを使っている。その証拠にスタート直後他の選手よりも腰の位置が低くなっている。

また、セットの際の首の位置は伸展しており、スタート直後より頸反射(姿勢反射)や頸部伸展による体幹伸筋群(背中)の賦活がみられる。

トップスピード区間では体が起き上がり体幹のブレがない。体幹、股関節、大腿までが四角形のようで膝下、肘下が動いているように見えるくらい綺麗です。
つまり、自動化した制御の条件である姿勢反射や伸筋の賦活による近位の自動化した動きがみられるといえます、
前から見ると一目瞭然体幹と股関節はブレず膝下が多分に動いているように見えます。
メッシ
ロナウド
2選手に共通してみられるのは顎が伸展しており股関節より上は一定の動きをしていて、膝下を活発に動かしています。
加速時の顎は両者とも上がっており、頸反射を利用したピッチ確保や背中(体幹伸展筋)が機能しやすい環境にて動いていることがわかります。
つまり、内側運動制御系が働いているといえます。
またロナウド・メッシともに手を多様に動かしているのがわかります。
外側運動制御系を使って手を意図的に動かし身体や外界のコントロールを行っている。
サッカーは陸上競技と違い相手に注意を向けたり、ボールをコントロールしながら走るので身体近位部の自動化はより大切になってくると思います。
膝下の動きも意図した神経制御を用いてボールコントロールに使われています。
逆に積極的に意図した制御を使うことで自動化した神経回路の賦活も行っているのかもしれませんね。
このように走り方に再現性が見られれば、末端の操作が意図した制御で行えるので速いスピードでのボール操作が行いやすくなります。
再現性のあるドリブル・その他の動作へと繋がってくると考えます。

全ての動作の基本である走り。
再現性のあるスプリントとは自動化した神経制御をどれだけ上手く駆使できるか。
自動化した神経制御を引き出すには内側運動制御系、CPG、固有受容器反射の賦活が必要と考えます。
神経制御の観点から見てもやはり背中にスイッチを入れて走ることや反射系を使うことが自動化した神経パターンへ導く鍵だということがわかりますね。
今までfcpsolsが掲げてきた伸張反射等の記事、体幹記事の数々に記してあることは神経制御の観点から見ても再現性を示したスプリントには重要だということがわかります。
走りを速くしたい方はもう一度fcpsolsの記事を読み返すことをおススメします。
今回は神経制御の観点からスプリントを考えましたが今後は多角的な視点からスプリントを考えていきたいと思います。
あくまで一意見なので今後考えが変わるやもしれませんが現時点での考えを書いてみました。
最後までお付き合いいただきありがとうございます。
今後も更に考えを深め、有益な情報を届けられればと思います。
理学療法士/スポーツシューフィッター 安田智彦
よろしければサポートお願い致します。活動資金として使わせていただきます。 応援よろしくお願い致します!