「ソーシャルキャピタル」を豊かにするロボットの在り方とは?同志社大学准教授・飯尾尊優さんと語ってみた【コモさんの「ロボっていいとも!」第16回】


こんにちは、コモリでございます。
おひるやすみはロボロボウォッチング、ロボティクス業界のキーパーソンの友達の輪を広げるインタビューコーナー「ロボっていいとも!」のお時間となりました。
前回のゲスト、株式会社カラクリプロダクツ代表取締役・松村礼央さんには、テレビアニメ『攻殻機動隊S.A.C.』シリーズに登場するロボット「タチコマ」を制作したエピソードなどを中心に、楽しくお話を聞かせていただきました。
今回のゲストは、松村さんと同じくATR(株式会社国際電気通信基礎技術研究所)出身で、人間とロボットの相互作用、“社会資本”としてのロボットの在り方を研究されています。松村さんからも「最近の研究を詳しく知りたいです」とコメントをいただいているので、根掘り葉掘り伺っていきたいと思います。
それでは早速お呼びしましょう。本日のゲストは松村礼央さんからのご紹介、同志社大学文化情報学部准教授、ソーシャルロボティクス研究室の飯尾尊優さんです!

情報工学への道、開いたのは“貞子のいる世界”?
飯尾:ご紹介ありがとうございます。「ロボっていいとも」の連載、拝見していますよ。弱いロボットの研究者である岡田美智男先生やGROOVE Xの林さんなど、個人的にもロボティクス界隈で注目していた方が取り上げられていて、とても面白く読んでいました!
コモ:そう言ってもらえるとうれしいです! 早速、恒例の質問なのですが、飯尾さんは幼少期、どんな子どもだったのでしょうか。小さい頃からロボットはお好きでしたか?
飯尾:いえ、まったく(笑)。大学院に進学するまで、ロボットとはほぼ無縁でしたね。そもそも、小学生の時なんかは生粋の文系で、算数がめちゃくちゃ苦手だったんですよ。
コモ:なんと、そうだったんですね……!
飯尾:あまりに苦手すぎて、克服するために中学生からは塾に通わされたくらいでした。でも、文字式が出てきたあたりから「あ、数学は単なる記号の操作なんだ」って腹落ちして、パズルみたいに解くのが楽しくなりました。
コモ:むしろ好きな教科に?
飯尾:そうですね。昔から人間とか生き物全般への興味は強かったので、数字への抵抗感がなくなってからは、進路の検討も自然と理系へ寄っていった気がします。
コモ:同志社大学の付属高校から理工学部の情報工学系に進学されたんですよね。それには何かきっかけがあったんでしょうか。
飯尾:父親から借りて読んだ鈴木光司さんの『ループ』という小説には、けっこう影響を受けたなと感じています。映画化されて有名になったミステリーホラーの『リング』や『らせん』の完結編にあたる作品なのですが。
コモ:『ループ』は知りませんでした。前の二作と同じようなホラー作品なんですか?
飯尾:ホラーというより、かなりSF色の強い内容でして……少しネタバレになってしまいますが、『ループ』では「それまでの二作の舞台が、実は生命の進化と可能性をシミュレーションするためにプログラミングされた仮想世界だった」という事実が明らかになるんですね。貞子はシステムバグだった、とか。
コモ:そんな設定だったとは……!
飯尾:SF好きには「ありがちな話」かもしれませんが、当時の自分にとってはかなり衝撃的でした。人間や生物の神秘を、0と1だけで記述される世界線に落とし込みながら探求していくって、なんかカッコいいなと思いまして。
それで、高3の時に大学のパンフレットを見てみたら、工学部の知識工学科(現在はインテリジェント情報工学科)の説明に「遺伝的アルゴリズムなどの生物の進化を模倣した手法を使って、コンピュータプログラムを進化させるぜ」みたいなことが書いてあって、「面白そう、これや!」と。
本音を言うと数学とか生物学をやってみたかったんですけど、できそうなところがなかったので、その次点ではあったのですが(笑)。
コモ:じゃあ、大学に入ってからガッツリとプログラミングを?
飯尾:そうです。それまで一切やってなかったから、イチから覚えるのがめちゃくちゃ大変でした。ノリで選んだのを後悔していましたね……。
研究が面白くなっていったのは、4年生の頃からです。ちょうど研究室を選ぶタイミングで、ATRから人工生命分野の先生が新しく赴任してきたんです。
その先生は「コンピュータなど人工的なメディアを用いて、構成論的なアプローチから生命や生命体に特徴的な現象や振る舞いを創り出す」といったコンセプトの研究をしていると言っていて、「これこそ自分のやりたいアプローチだ!」と思って。彼の研究室に入ってからは、遺伝的アルゴリズムを用いたマルチエージェント・シミュレーションの研究に打ち込みました。
「人間単体の行動原理」ではなく「行動から生まれる相互作用」を研究対象に
コモ:ロボットとの縁は大学院の時に……とおっしゃっていましたが、きっかけは?。
飯尾:大学院2年のときに、ATR知能ロボティクス研究所のインターン募集があって、先生に勧められて参加したんです。そこで初めてロボットシステム開発に関わりました。
これまで「なんで人間はこんなにも複雑で多様な行動をするんだろう?」「その背景にはきっと何らかの原理やルールがあるに違いない。それを知りたい!」といった興味に突き動かされてきたのですが、大学に入ってからいろいろ学ぶうちに「まず身体ありきなのでは?」と感じるようになっていて。
コモ:身体ありき?
飯尾:それまでコンピュータシミュレーション上の単純なエージェントを使った研究をしていましたが、そこで創発される行動は、適応度関数を最適化するための、ある程度決まった行動なんですよね。
でも、実際の人間はめちゃくちゃ複雑な環境の中で、体中のセンサを使いながら、とにかく動き回って、他者と色んなレベルで相互作用しているじゃないですか。大量の情報のやり取りがあって、そこから多様な行動が生まれていくわけです。
「抽象的な世界ではなく、リアルな世界で人間の行動を理解したい」と考えたら、実体のあるロボットを研究に活用するべきなんだろうなと。
コモ:修了後はATRの研究員を経て、大阪大学の石黒研究室にも所属しながら、さまざまなロボティクス関連のプロジェクトに携わられていますね。ここまでの間に、どのようなロボットシステムの研究開発に関わってこられたのですか。
飯尾:代表的なものを挙げると、3つあります。1つ目は「指示物体認識ロボット」です。人間が「〇〇を取ってきて」と指示を出すと、周囲を見回しながら「あの赤い〇〇ですか?」と指差し確認をしてから取りに行きます。この研究を通して、人間とロボットの間でも「引き込み現象」が起こることが分かりました(※1)。
コモ:引き込み現象?
飯尾:一言で説明すると「誰かとコミュニケーションを取っているときに、相手の言動をお互いに真似し合う現象」のことです。
先ほどの例で言うと、ロボットが何かを指差した後で、人も指差しの動作を真似する傾向が強くなりました。また、ロボットが「あの赤い本」と表現すると、人も「大きい本」とか「あの小説」とかではなく、対象を「赤い本」と言いがちになるんです。
コモ:つまり、人はロボットと接しているとき、無意識的にその言動を真似してしまうことがあると。ナッジ(人々がより良い選択を自発的に取れるような環境・行動のデザインをすること)にも応用できそうな観点で、とても面白いですね。
飯尾:2つ目は「来場者の行動履歴に応じて接客を変える展示説明ロボット」です(※2)。本田技研工業株式会社と共同で取り組んだもので、複数の深度センサを使った人物追跡技術とRFIDタグを使った個人同定技術を駆使して「その人が前回いつ来たのか、その時は何をどれくらい見ていたのか」などを踏まえた展示説明を行うロボットシステムを開発し、日本科学未来館で実際に来場者に体験してもらう実証実験を行いました。
飯尾:その結果、たとえ相手がロボットでも、人は「自分のことを覚えていて、ほかの誰でもない自分向けの対応をしてくれている」と感じると、親しみを覚えてハッピーな気持ちになることがわかったんです。
コモ:なるほど。これからロボットが広く社会で受け入れられていくためのプロセスを考える上で、とても大事な気づきですね。
飯尾:3つ目は「高齢者と対話する複数体連携ロボット」です(※3)。株式会社NTTドコモと共同で取り組んだもので、音声認識の困難な高齢者の方々と対話を継続するために、音声認識結果に強く依存せずに2体のロボットが連携することで話を繋ぐようなシステムを開発しました。

簡単なあいづちやリアクションをするだけなんですが、老人ホームにこのロボットを持ち込んでみたら、戦争体験などを含む、すごく深い自己開示をする高齢者さんが何人もいらっしゃったんです。スタッフさんたちも「初めて聞く話ばかりだ」と驚いていて。
コモ:対人では少し打ち明けにくいものが、ロボット相手だと話せることがある……ということなんでしょうか。
飯尾:そうなのかもしれません。いずれにせよ、高性能なロボットではなくとも、人の痛みに寄り添えたり、気持ちを和らげたりできるのなら、とても素晴らしいことですよね。
これらの研究を通して、自分は「人間の行動のメカニズムがどうなっているのか」よりも、「ある行動によってどんなインタラクションが生まれるのか」に興味があるのだな、とあらためて理解できたんです。
仕組みや原理はどうであれ、そこにロボットが存在することで「結果、人がハッピーになる」のが重要だし、自分もそういった人間社会に貢献できるものをつくっていこうと思うようになりました。
弱いつながりを生み出す、コミュ力のあるお地蔵さん
コモ:現在はどのような研究に取り組まれているのでしょうか。
飯尾:主に「どのようなロボットが人々のウェルビーイングにつながるか、またソーシャルキャピタル(社会関係資本)となり得るか」といった視点で、さまざまなロボットの開発や実証実験を手がけています。
コモ:ソーシャルキャピタルとは、「人間関係のつながり」などのソフトな意味での社会的な資本を表す言葉ですね。私も最近注目していました。
飯尾:先行研究を参照すると、ソーシャルキャピタルが厚ければ厚いほど、社会に属する人々の協調行動が活発化し、経済がより効率的に回ったり、災害時の対応力が向上したりすることがわかっています。
直近では、ソーシャルキャピタルを醸成するためのロボットシステムを構築する研究を行なっています。
コモ:おお、なにやら壮大な響きですね……!
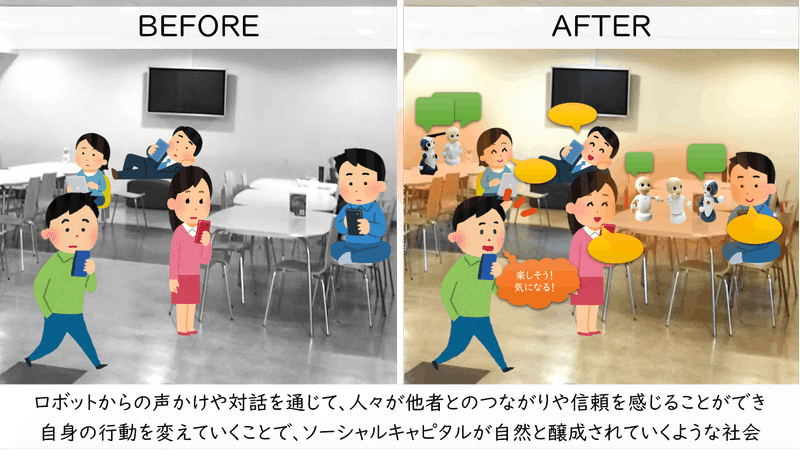
飯尾:いえ、そんな大掛かりなことは全然していなくて。大学の構内にコミュニケーションロボットを設置して、道ゆく人たちに話しかけさせようとしています。
立ち止まる人もいれば、そのまま通り過ぎる人もいます。ただ、通り過ぎる人にも、ロボットと人の話し声がうっすらと耳に入ったりする。あるいは、「ロボットと話している人がいるな、あんな人が同じ大学にいるんだ」と認知したりする。これってつまり、「ロボットをハブにして、同じ空間にいる人たちの間に、弱いつながりが生まれている」とも言えるんですよね。
コモ:なるほど……! なんだかそれって、現代版のお地蔵さんのようなイメージですね。「村の人たちみんながお地蔵さんを気にかけている」という状態は、共同体としてのかすかな、けれども確かな連帯を作っていた気がします。
飯尾:お地蔵さん、いい例えですね。リアルな共同体のハブをつくる上で、実体があることはとても大事な要素だと思うんです。ASIMOは排気音がうるさいからこそ「確かにそこにいる」と思えるし、LOVOTも抱くと犬や猫くらいの温度があるからこそ「生き物みたい」だと感じられます。
実体があるから伝わる言語以外の複雑な情報が、コミュニケーションの説得力を高め、インタラクションの強化につながっていくのではないか──このような仮説がはっきりと立証できれば、物理的な身体を持つロボットだからこそ役立つシーンが、もっともっと日常へと浸透していくはずです。
複数ロボットが織りなす小さな社会性を人間が感じる可能性
コモ:お話を聞いていると、ロボットが身近にいる世界のイメージがどんどん膨らんできました。飯尾さんご自身は、少し先のよりよい未来に向けて、これからどんな研究を進めていきたいですか。
飯尾:これまでのロボット研究の多くは「ロボットと人、一対一のインタラクション」にフォーカスするものがほとんどでしたが、「ロボットたちと人々、複数対複数のインタラクション」にもっと可能性がありそうだなと感じています。
僕はロボットからの「褒め」が人にどんな影響を与えるか、といった研究もしているのですが、その中の実験で「1台のロボットから100の量で褒められるよりも、2台のロボットから50ずつの量で褒められたほうが、人はよりポジティブな気持ちになる」とわかりました(※4)。
コモ:人の場合でも、1人からより2人から褒められたほうが説得力があるように感じますね。
飯尾:それがロボットでも起こるのは、つまり「人が複数のロボットに社会性を感じられる」といえるのだと思います。
ロボットが1体ぽつんと置いてあっても、人は「ああ、ロボットがあるな」としか感じない。けれども、ロボットが3〜4体あって相互にやりとりをしていると、ぐっと人間味が増して、そこに接した人とのインタラクションも生まれやすくなるような気がするんですよね。
コモ:『攻殻機動隊』のタチコマたちが思い出されますね。つまり、ロボット単体を人間社会に持ち込むよりも、複数のロボットを持ち込んだほうが、狙ったインタラクションが生まれやすい……ということでしょうか?
飯尾:現段階でそこまでは断言できませんが、その可能性はあるんじゃないかと。それを確かめたくて、小型のロボットを30台まとめて買ったんですよ、最近。机に並べてみたんですけど……圧がすごくて(笑)。
コモ:これはちょっと怖い!(笑)
飯尾:この子たちを使って、これから「複数のロボットが構成する小さな社会を、人間社会に重装させていって、望ましいインタラクションを生んでいく」といったアプローチも試していきたいと思っています。
コモ:これからさらなる研究の飛躍のために、ロボット開発者の立場から「ロボティクス関連でこんな技術的なツールが足りていない!」と思われるものはありますか。
飯尾:そうですね……できればROSと同じような形で、音声・画像認識などのインプットと、行動生成などのアウトプットのインテグレーションを、大まかな設定でうまくやってくれるようなプラットフォームがあるといいなと。
現状、さまざまなインプットとアウトプット、それぞれ個別の要素のクオリティを上げる研究は、ものすごく進んでいます。ただ、それらをひとつのシステム上でどう統合させていくか、という研究はあまり進んでいない印象です。
コモ:個別の要素で「これができるようになりました!」というのはわかりやすい成果ですもんね。統合の分野は難しいし、評価もされにくい……。
飯尾:そこを補ってくれるデファクトスタンダードができてくれたらなと。コモさん、Unityに期待を寄せてもいいですか?
コモ:……偉い人たちに耳打ちしておきますね!(笑)
さ〜て、次回のお友達はー?
コモ:大変名残り惜しいのですが、終わりの時間がやってきてしまいました。最後は恒例の「お友達紹介」です。飯尾さん、どなたをご紹介いただけますか?
飯尾:特定国立研究開発法人理化学研究所の吉野幸一郎さんにおつなぎしたいなと。今は知識獲得・対話研究チームのチームリーダーを務めていて、ロボットの言語処理においては、日本でも指折りの研究者だと思っています。
コモ:それはまた、とても興味深い! 吉野さんに何か伝言があればぜひ!
飯尾:言語分野の吉野さんがロボットをやっていこうと思うようになったきっかけなどが知りたいです!
コモ:本日のゲストは飯尾尊優さんでした。どうもありがとうございました!
皆様、次回もお楽しみに 😎
※これまでの「ロボっていいとも!」は、こちらからお読みいただけます!
該当論文
※1:T. Iio, M. Shiomi, K. Shinozawa, K. Shimohara, M. Miki, N. Hagita, Lexical Entrainment in Human Robot Interaction, International Journal of Social Robotics, Vol.7, Issue.2, pp.253-263, Apr, 2015
※2:Iio, T., Satake, S., Kanda, T., Hayashi, K., Ferreri, F., & Hagita, N. (2020). Human-like guide robot that proactively explains exhibits. International Journal of Social Robotics, 12, 549-566.
※3:Iio, T., Yoshikawa, Y., Chiba, M., Asami, T., Isoda, Y., & Ishiguro, H. (2020). Twin-robot dialogue system with robustness against speech recognition failure in human-robot dialogue with elderly people. Applied Sciences, 10(4), 1522.
※4:Shiomi, M., Okumura, S., Kimoto, M., Iio, T., & Shimohara, K. (2020). Two is better than one: Social rewards from two agents enhance offline improvements in motor skills more than single agent. PloS one, 15(11), e0240622.