Sports Biomechanics Geek #4 〜トレーニングと競技の力学的近さ〜

トレーニングにおいて挙上重量が増加しても,競技力が向上しなくては意味がないだろう.「強度」が増加しても競技力が向上するかはわからない.トレーニングでは特定の運動能力向上を目的とすることが多く,競技の力学的特徴が実際の競技に近くなるように適応することも重要だ.そこで本章では,「強度(力)」に「速度」を加えて,競技とトレーニングにおける運動の力学的特徴を表現することで,運動の「近さ」を考える.これにより,トレーニングの強度と量を記録していくとともに,その力学的特徴も調べることでトレーニングの行い方が適切かどうかを判断する材料となる期待がある.ただし,強度と異なり,トレーニングの現場に落とし込む方法論として解決すべき問題も多く,多少,概念的になることお許しいただきたい.また「近い」ことが必ずしも良いトレーニングとは限らない.近さだけでなく競技に「適した」トレーニングを構築していくうえで,計測環境や生理学応答などまだまだ未開拓分野だ.
はじめに
運動の力学的近さの表現
トレーニング施設には最新の機器が数多くあるが,バーベルや質量を利用したトレーニング装置が中心ではないだろうか.機器の進化で多様な選択肢が増えたが,与えられる力学的性質は,実際の競技の運動とは異なる点が多い.
必ずしも競技とトレーニングの運動が物理的に「似ている(近い)」ことがよい結果を導くとは限らないが,違いを,ベクトルの大きさや方向としてを意識することは少なくとも重要だ.
前章

で述べたように強度として関節に作用するトルクを変数として考え,強度における近さを幾何学的にイメージするために,肩,肘,手関節に作用する最大トルクを$${\tau_1, \tau_2, \tau_3}$$で記述される3次元空間で記述することを試みる(図1).$${\bm{X}_A, \bm{X}_B}$$はAさんのとBさんのこれらのトルク発揮パターンをベクトルで示したものと考える.するとAさんとBさんの力発揮の特徴を,この二つのベクトルの「近さ」で記述することを考える.近さはたとえば,二つのベクトルの先端の距離$${||\bm{X}_A - \bm{X}_B||}$$で記述できるだろう.似ているかどうかはベクトルのなす角度で表すこともできる.二つのベクトルの先端の$${\bm{X}_A}$$と$${\bm{X}_B}$$の距離は遠くても,目指す方向が近いことは重要かもしれない.近さを表す変数の候補が4個以上となると,図1のようにもはや3次元空間には記述できないが,多次元ベクトルによって運動の力学的特徴を記述できる.
本章では,異なる運動の「近さ」を表す指標として,「力」に「速度」を加えることで,力学的にトレーニングに関する記述が豊かになることを示していく.
なお,以下に述べるインピーダンスに関連した着想は,何十年も前に故小林一敏先生が唱えられていた考えがベースとなっている.ご興味があれば文献1なども参照されたい.本章は小林先生の着想を筆者なりに整理し直したものである.
身体運動の力学的特徴
目的最大化と動力伝達

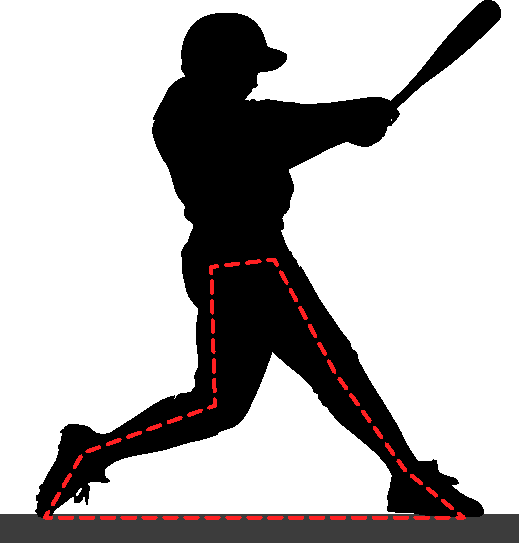
日常行う身体運動と比較すると,スポーツのような運動は特殊な運動と捉えられがちだ.確かに,日常生活でゴルフスイングのような動きをすることはないだろう.スポーツの運動の目的がそもそも特殊だ.たとえばクラブとボールを衝突させる際に,遠くに正確に飛ばすという,強い拘束のもとに運動を行うことである(図2参照).これを「目的最大化(最適化)」の拘束と呼ぶこととする.スポーツ科学の研究は個別の目的最大化のためのスキルのメカニズムや,それが発揮される手先や足先の運動にフォーカスされがちだ.
ちなみに,そのような運動に共通し,競技間につながるダイナミクス(メカニズム)があると考えているが,そのことに関しては今回の主題ではないので,それについてはまた別の機会に述べることとしよう.

もちろん「目的最大化」も我々が行う運動パターン形成を強く拘束し,目的に依存し特殊な運動パターン形成を導くことが多い.しかし,もう一つ我々の運動を拘束するだろう「動力伝達」という観点では,比較的出力の弱い日常運動でも,出力の大きなスポーツのような運動でも,効率よくエネルギーを利用するという本質は生命維持の観点でも共通で,我々が行う人間としての本質に違いはないはずだ(図3参照).
たとえば手先の力は体幹や下肢などと比べ相対的に弱く,その近辺で動力を発揮しても負担がおおきいばかりだ.このため日常の身体運動でも,出力が大きく余裕のある部位から動力を伝達する必要がある.したがって,「動力伝達」は,スポーツも日常の運動でも,ヒトでも他の生物でも運動を強く拘束する.さもなければ我々は生き抜くことができない.スポーツの場面では怪我を導くことにもなるだろう.このように動力伝達は生命の本質と密接に関係する.それゆえ,ヒトが行うどのような運動にもある種の「自然さ」を感じ,特殊な運動を行うスポーツでも,洗練された選手の動きに我々は「美」として感じているのかもしれない.
ここでは,この問題を暫定的に「動力伝達最適分配」問題と述べておく(補足1).
ここでは,ヒトの自然な運動の力学的特徴を強く拘束するメカニズムのひとつが「動力伝達」=「力学的エネルギーの伝達」と関係するという立場にたつ.つまり「動力源からエネルギーの効率よい伝達」が日常生活でも疲労や生命維持と関係すると考え,もちろんスポーツにおいても競技成績と密接に関係するはずという立場である.
そして,その動力伝達の数理・物理が「運動やトレーニングの力学的特徴」の基本も構成することを述べていく.
動力伝達のイメージ
力学的エネルギーを構成する運動エネルギーと位置エネルギーのうち,運動エネルギーは一種の運動の勢いを表し,物体の質量に比例し,速度の二乗に比例する(補足2).
エネルギーは「仕事をする能力」などとも説明されるが,移動させてそれを別の部位で利用することもできる(能力がある).エネルギーについては,補足3(仕事とエネルギー)も参照されたい.

身体のある部位の力学的エネルギーを計算し,その時間変化率はパワーに相当するが,これを説明するためエネルギーを流体の量に例えるなら,パワーはエネルギーの単位時間あたりの流れる量に相当する(図4参照).するとエネルギー伝達の効率はパワーで記述できる.また特に筋肉などのアクチュエータ側のパワーを動力と呼ぶことがある.そこでここでは,力学的エネルギーの伝達を「動力伝達」と呼ぶことにする.
電力の場合,電気代(電気使用量,単位:ジュール)がエネルギーに相当し,消費電力(単位:ワット)がエネルギー変化率(パワー)に相当する.
このようにエネルギーを用いると,電気回路や流体など多くの分野の現象を共通したメカニズムで考えることができることが利点で,このような流れにようるたとえも,エネルギーの共通する概念を利用している.ただし,機械力学の教科書にはほとんどでてこない.エネルギーフローのような用語を頻繁に使用するはバイオメカニクスぐらいだろう.しかしエネルギーの流れ(フロー)の概念,あまり使われていないだけだ.ロボットや機械系の研究では,安全,巧みに動かすことが優先され,あまりエネルギー効率に関心がないようだ.
トレーニングにおける運動の力学的特性
トレーニングでは競技特性を向上させる運動刺激を与える必要がある.スプリンターが自転車のトレーニングを行ってもあまり意味がないだろうし,自転車競技の選手が,プライオメトリックトレーニングを多く行っても効果はさほどないだろうここでは,この競技特性をどのように力学で表現するか考えていきたい.図1に相当する運動の力学的近さを「力」と「速度」で記述することが,以降の課題となる.
前章でトレーニングの強度を記述するために「力」$${f}$$や「トルク」$${\tau}$$を,トレーニングの総量を記述するために「力積」$${\int f dt}$$と「力積のモーメント(角力積)」$${\int \tau dt}$$を導入した.しかし,運動の力学的特徴はこれだけで記述するにはたりない.そこで,運動の力学的特徴を記述するために,新たに「速度」$${v}$$を導入する.
すなわち力$${f}$$と速度$${v}$$の二つの状態のセットで,運動や競技の力学的特徴を記述する.この速度を加えただけで,単位時間あたりにどのぐらいエネルギーを供給しているか,またはどのように供給すると効率的になるかを表現することができ,運動に関する情報がリッチとなる.
また,最終的にどれだけ仕事をしたか,またはどれだけエネルギーが増えたかの総量を考えるのではなく,単位時間あたりにどれだけエネルギーを増大させるのかという視点で考えていきたい.
なお,運動の力学的特徴を記述することはできないが,本題に入る前に,力と速度の積であるパワーについて述べておく.
パワー:運動の効果
力と速度の積をパワー(power)と呼び,パワーは物体を移動させるための単位時間あたりに必要とするエネルギーとしての意味がある.エネルギーを供給する側としてのパワーは,とくに動力と呼ばれることもある.パワーは「単位時間あたりにどのぐらいエネルギーを供給しているか」を示す物理量である(図4参照).
スポーツのような身体運動では筋肉(アクチュエータ)が「動力源」で,手先などに作用する「負荷」に対してどのように動力を伝達するかをという視点で,以下では議論する.なお,ここで「負荷」は単に物体・オブジェクト・対象として捉えていただきたい.前章でも述べたが,負荷は科学の世界では物理量では用いない.トレーニング業界では,残念ながら負荷が物理量の意味を持っているが,その定義が曖昧,かつまちまちで,この用語を物理量として使うことは,少なくとも科学的な議論を行うためには行わないほうが懸命だ.
例えば,投球ではボールを身体から見ると負荷(オブジェクトで,強度ではない)と考え,それをできるだけ速く正確に投げることが求められる.すなわち単位時間あたりに負荷に供給するパワーと,その積算である力学的エネルギーを大きくすることでボールの速度を増加させることができる.ランニングの場合は,自分自身を動かすことになり,それは身体重心に作用する力と重心の速度が運動を拘束するが,地面反力と重心に作用する力は同じで,負荷を動かすのでなく自分自身を相対的に動かすと考えれば,見かけ上,地面という硬く重い質量を負荷と考えてもよいだろう.
仕事は運動の移動という効果を表現することに適した物理量で,その時間微分であるパワーは単位時間あたりにどれだけ移動させることができるかを表現することに適している.自転車競技であれば,動力(パワー)の伝達能力が競技力そのものと考えて良い.ただし運動の効果を記述することに適した物理量であるが,運動の特徴を記述することはない.
たとえばバーベルに作用する力ベクトルと速度ベクトルを計測し,その内積を計算すればパワーになるが,パワーが大きくなるように動かすということは,バーベルの質量が相対的に軽くなってくると,高く投げ上げることが負荷レベルでのパワーを最大化することになる.しかし,負荷レベルのパワーを最大化することが,特定のスポーツで必要とされる動かし方と一致するかどうかはわからない.特徴は,力と速度の積では記述できない.
例えば負荷に作用する力を$${f}$$とし,負荷の速度を$${v}$$とすると,力学的エネルギーの時間微分である,動力(パワー)$${P}$$は
$$
P = \dot{E} = f v
$$
で表され,この力$${f}$$と速度$${v}$$に分解することで動力伝達の議論を行う.
機械力学の教科書では,物体の運動の記述は運動方程式が中心で,機械システムの入出力を力と速度の両方で記述することはあまりないが,一般に,競技特性を特徴付けるためには,この力$${f}$$と速度$${v}$$の二つの状態のセットで記述する.わざわざ積を計算するのではなく,分解したまま力$${f}$$と速度$${v}$$のセットで記述するのも一つの方法である.
なお,機械力学では運動方程式ベースで考えることが中心だが,運動方程式だけで伝達効率を議論を行うことは困難である.そこで,以下の議論のように力学的エネルギーの時間変化(エネルギーの流れや抵抗)をベースに考えていきたい.そしてこれが,トレーニングを含めた身体運動の力学的特徴を記述する重要な考え方となる.
インピーダンスマッチング
力と速度のセットで運動を記述することで,特に動力伝達の表現が豊かになると述べたが,ここでは力と速度が,動力伝達に関連してどのように運動の力学的特徴を表現するのか述べる.
なお,インピーダンスマッチングについては
でも述べている.重複する分が多いが,そちらも参照されたい.ここでは,トレーニングと動力伝達という観点から整理し直している.
あらかじめ以降の議論の要点を述べると,
環境と身体が弾性的な振る舞いをしているなら,弾性係数
弾性ではないなら,力(トルク)–速度(角速度)変化
に注目する.
機械インピーダンスの導入
ここで,力と速度の関係の意味を捉えやすくするために,機械素子の概念を導入する.
たとえば下肢や体幹で作られたエネルギーがゴルフクラブに,そのまま流れればよいが,ことはそう簡単ではない.身体を構成する質量などがエネルギーの伝達を阻んでいる.動力の伝達を妨げるものは一種の「抵抗」である.機械系では,たとえば質量,バネ,ダンパなどが代表例だ.電気回路の電気素子にならって,これを機械素子と呼ぶことがある.これらの機械素子が運動の力学的特徴を構成すると,問題は比較的単純化されるので,ここでは機械素子を使って運動の特徴を記述することを試みる.
電気回路以外の機械回路なども含め,一般に「抵抗」を総称でインピーダンス(impedance)と呼び,特に質量や弾性などの機械系のインピーダンスを機械インピーダンス(mechanical impedance)と呼ぶ.インピーダンスは抵抗だが,機械系では「力と速度の比」と考えれば良い.「力」と「速度」は電気回路では「電圧」と「電流」に対応するが,電気回路でが電圧と電流の「比」が抵抗である.
電気回路(特に交流回路)ではこの素子の特性が,電力供給側と負荷側で一致していないと電流は流れない.そこで,電気回路同様に機械回路の素子で身体を表し,身体における効率よいエネルギー伝達の条件は,同様に「動力を生成する側と,動力を受け取る側(負荷側)の機械インピーダンスを一致させる」ことになる.すなわち両側のインピーダンスの近さが動力伝達の効率につながり,インピーダンスが運動の特徴を記述することになる.たとえば,機械素子でも同じ弾性係数のバネ同士の反発がもっとも効率よく反発することが知られている(共振(resonance)と捉えることもできる).この性質を考えれば,トランポリン競技で身体全体をひとつのバネとみなすと,トランポリンの弾性係数にあわせて,身体側の弾性係数が一致するように身体全体の硬さを調節することで,高く跳躍することができることが期待される(図5).実際モーションセンサレベルでの確認になるが,接地中身体は恐ろしく強いバネを構成している様子がうかがえる(陸上競技の跳躍系よりも大きな力が発揮されているかもしれない).

身体の一部,または全体がバネのように振る舞っている場合,身体側の弾性係数を同定し,環境や負荷側と同じような弾性係数を示すなら,身体側の運動は競技の力学的特性に適した運動をしていることをチェックできることになる.この場合,弾性係数が近いことが,パフォーマンスを向上させることと直結している.スーパーボールがよく跳ねるのは,地面が硬いために,弾性の大きい硬いバネでボールを構成されているためで,硬い物体には硬いバネで反発させることでエネルギーの授受が効率良くなる.このことと同じ原理だ.
トランポリン以外の例を上げよう.
硬式ボールに比べて柔らかい軟式ボールとよく反発するバットは,硬式ボールに比較し柔らかいバットにする必要がある.ミズノ社のビヨンドマックスという軟式野球用バットはこの性質を利用し,従来よりもむしろ反対にバットとボールが衝突する部分を柔くすることでより反発する性質をもたせるように開発されたバットだ.硬くすることばかりがよいのではなく,マッチングすることが大切であることを示した例だ.トランポリンと全く同じだが,短距離走や走り高跳などの跳躍系の競技は,地面という硬い弾性にみあうように,身体側を硬くすることで,身体を弾ませて移動したり跳躍している.100m走は身体全体を硬いバネにして,もはや跳躍運動を高速に繰り返していると考えるほうが物理的にはマッチしている.今後も選手の能力が高くなるにつれ,おそらく走路も硬くなり,靴底も固くなるということが繰り返されるだろう.
このようにスポーツに限らず,ヒトの運動で効率よく負荷側にエネルギーを伝達する際ためには,負荷と動力側のインピーダンスを等しくすることが求められ,これをインピーダンスマッチング(インピーダンス整合:impedance matching)と呼ぶ.
なお,身体がバネのように振る舞っているかどうかの判断は,力$${\bm{F}(t)}$$がベル型のようなカーブを示し,バネに相当する長さ$${\Delta x(t)}$$が短縮から伸縮へと変化していれば,弾性のような振る舞いをしていると考えてよいだろう.

ランニングでは,身体全体をバネとみなし,身体重心と地面間の長さがバネの長さと考え,地面反力が重心の加速度で定まることを考えれば,地面と身体重心を結ぶバネとみなすことができる(図6).
このように,力と速度の比を計算するよりも,たとえば身体全体がバネのように振る舞っている際には,弾性係数を推定することにより,運動の特徴が観察ができる.身体のバネの弾性係数の求め方は割愛するが,バネ的に振る舞っている際の力が接触している時間と力などから計算することができる.
なお,機械回路におけるインピーダンスについての数理的な理解にご興味のある方は(電通大・下條先生の資料「機械回路の記号解析」)や,文献2などを見るとよいだろう.
弾性係数とRJ指数
弾性係数とは異なり物理的意味はないが,日本ではこれに近い係数が身体の硬さの指標として利用されている.これはRJ指数(rebound jump index)と呼ばれ,この係数が高いほど,跳躍能力の高さなどを示すことが知られている.ただし,この指数そのものは経験的に導入された指数で,弾性係数に近いが,物理的意味はあまりなく,RJ指数は弾性係数の1.5乗に比例し,質量の1.5乗に反比例する指数だ.詳細は
を参照されたい.筆者は弾性係数を求めることのほうがが物理的,工学的に意味があると考えるが,RJ指数自体かなり普及した方法でデータの蓄積があることから,RJ指数で比較するほうが選手としては便利な側面は多分にあるだろう.エリートアスリートのRJ指数を具体的な数値で知りたいなら,文献3などを参照すると良い.選手のRJ指数を計測したいならマットスイッチで計測可能である.
なお,一般論からの考察だが,跳躍系の技能は身体がより固くなるように(RJ指数が大きく)振る舞うことで向上している.恐らく徐々に地面の硬さもルールで固くなっていることだろう.身体と地面が双方に固くなることで,記録が向上している.このことは,短距離や長距離では目指すトレーニングの方向が,近さではなく,身体が硬くなるように進化すべきであることを示唆している.
競技力を向上させるためのトレーニングとして,身体に少し質量$${m}$$を増やしながらジャンプするのが良いのか,少し高い位置からドロップジャンプ(位置エネルギーの増加)が良いのかなどは,その時の身体の力学的な振る舞いと,長期的な生理学的な適応から判断できるだろう.
このように,トレーニングにおいて力学的に近い力と速度発揮を目指すのではなく目標は少し異なるところに置くべきで,その力学的目標の設定の仕方(図1のベクトルの方向)が,新しいトレーニング科学の研究すべき点である.
なお,このような議論の続きから,SSC(stretch shortning cycle)が重要と考えがちだが筆者は否定的だ.これについては,またどこまで述べることとするが,その本質を「局所的」な筋肉や腱の弾性を起源に考えるか,そうではなく,ここで述べてきたように,あくまでも「身体全体」でひとつの弾性のような振る舞いが重要かで見解が異なる.
短縮性・伸張性収縮
バネの場合と伸びと縮みの特性は対称であるが,実際の筋肉の収縮特性を考えると,問題はそう単純ではない.
筋肉は基本的には一方向に収縮することしかできない.これに対して,筋肉の収縮速度は正負にまたがる.収縮方向の速度$${v}$$の向きを正とすると,短縮しながら力発揮する.運動が弾性的な振る舞いをするとき,最初に筋肉が伸ばされながら伸張性(eccentric)収縮し,その後収縮方向と力発揮方向が一致するような収縮を短縮性(concentric)収縮を行う.
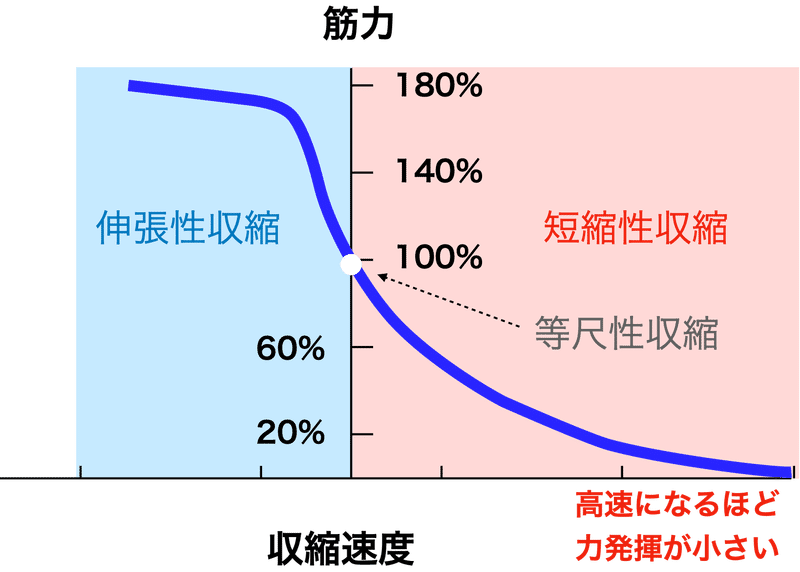
よく知られているように伸張性収縮時のほうが収縮力は大きい(図7参照).もし単関節運動なら伸張性収縮は負の仕事をすることにつながるが,多関節運動や閉ループ構造をとる運動では,伸張性収縮の大きな力発揮は,まわりまわって末端に届き大きな動力源となる.このことを考えれば,動力源の関節で伸張性収縮の活動を有効利用するフェーズはトレーニングとして強化すべきかもしれない.そして,伸張性収縮から短縮性収縮に切り替わる(速度=0)フェーズの力(またはトルク)発揮の大きさが運動の特徴を表す特徴量になるだろう.
したがって,弾性要素がバネ的な振る舞いをする際でも,伸張性収縮と短縮性収縮のフェーズが存在するが,フェーズごとにどの方向に能力が向上しているかを観察すべきである.
マッチングトランスファーによる機械インピーダンスの変換
動力源側と負荷側のインピーダンスが都合よく,バネでそれらをマッチングできる場合は良いが,スポーツのような運動でも,いつも負荷側がバネとは限らない.つまり機械素子でマッチングできる場合はそれなりにあるが,限界もある.
しかし,機械素子に頼らずとも,インピーダンスは力と速度の比であるから,その比はテコで変換することマッチング(整合)させることができ,動力伝達を向上させることを可能とする.電気回路ではトランスがその役割を果たすが,機械回路ではテコやギアがそれに相当する.
自転車や自動車のギアチェンジがトランスに相当し,多関節の身体全体をテコと考えれば,身体の姿勢のとりかたでもインピーダンスを動力側から負荷側に変換が可能となる.これは「動かして学ぶバイオメカニクス」
の第28~31章までに述べてきたヤコビ行列(Jacobian matrix)がその役割を担うことになる.身体におけるヤコビ行列はテコそのものである.
ただし,身体の動力側(筋肉)のインピーダンス,すなわち力,速度比は,筋肉の性質である程度定まってしまうので,環境側のインピーダンスに合わせてギア変換することで,インピーダンスのマッチングをはかることが一般的だ.
たここでは,このテコ比によるマッチングについてはあまり深いりしない.ご興味ある方は
を参照されたい.
力・速度曲線
前述のように,身体がいつもバネのように振る舞うとはかぎらない.自転車のような運動では,そもそも環境・負荷側の自転車の抵抗が弾性的ではない.マッチングする対象が弾性抵抗ではないなら,身体側を弾性のように振る舞う必要はない.自転車の場合,運動は周期的ではあるが,伸張性収縮のフェーズが存在するのか不明だが,関節レベルでトルクと角速度のグラフや,それが周期的な運動を行うならその位相図の変化を観察することは重要だろう.
ただし,手先や足先のような負荷と相互作用する部分の力・速度関係と,関節のトルク・角速度関係は姿勢によって大きく変化し,伸張性と短縮性のフェーズのトルク(力)・角速度(速度)関係は関節レベル(トルクと角速度)で観察するほうが適切であろう.
図8の左上のグラフは,投球時の右肩関節トルク(縦軸)と相対角速度(横軸)の関係を,内外旋軸まわりで観察している.恐らく最大外旋位近辺までのトルク発揮特性が重要だが,トレーニング前後で,この波形がどのように変化するかを観察することは重要で,単にトルクや角速度のカーブではなく,このようなトルク・角速度曲線で観察することが重要だろう.

図9に内外旋以外のトルク–角速度関係も示した(青:伸展屈曲,橙:内外転,緑:内外旋).
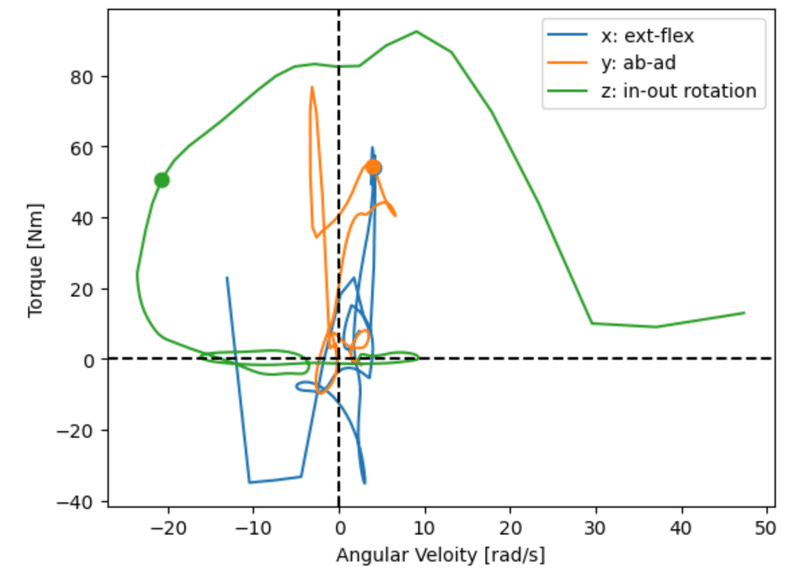
このうち内外旋方向のグラフは最大外旋時前後で,後方に引き伸ばされた(角速度が負)あと,前方に内旋し(角速度が正),常に正のトルクが作用していることから,一見すると弾性的振る舞いをしていると考えがちだ.しかし,肩関節の内外旋トルクは肩関節の可動域で自由度が拘束され(動かない),このトルク発揮の前半は肩関節のトルク発揮そのものというよりは,体幹側で発揮さていると考えた方が良く,完全に筋肉が弾性的な振る舞いをしているとは考えないほうが良いだろう.
これに関連したインピーダンストレーニングや,投球中の肩関節におけるトルク–角速度曲線の解析例については
を参照していただきたい.
ここで,この章の結論が中途半端になることをお詫びするが,この図8の左上のグラフの曲線を,どのような方向に改善することが投球の競技力を向上させることなのか?どのようにトレーニングすることで,それを達成できるのかはまだ道半ばである.
抵抗の与え方は,質量,粘性,弾性,部位(手先・関節),並進・回転,方向,いろいろとアイデアや可能性はあるが,実現可能性や実際にどのような適応効果があるかの研究など課題も多い.競技の力学的特性を知る必要もあるだろう.トレーニングは生理学的な応答だが,トレーニング方法の開発はむしろ力学的な視点からの改善でできることは多いだろう.
おわりに
たとえば,競技の力学的特徴を,力$${f}$$や速度$${v}$$などの複数の「状態」で記述でできた仮定しよう.するとこれをベクトルを$${\bm{z}(f,v)}$$にまとめることができ,運動の特徴ベクトルと呼ぶこととする.実際には時間変化するが,この競技の特徴ベクトルを$${\bm{z}_s(f_s,v_s)}$$とし,トレーニングの特徴ベクトルを$${\bm{z}_t(f_t,v_t)}$$で記述できたとしよう.これらの二つの特徴を表す状態の近さは,ベクトル間の距離(たとえば$${||\bm{z}_t - \bm{z}_s||}$$)で記述できる.また,そのトレーニングの目指す方向も特徴量ベクトル$${\bm{z}_t}$$の方向で定める可視化することができる.
ただし,実際にどの方向に,どの大きさでトレーニングの目標をセットすることで競技特性にみあうように筋肉の力学的特徴を改善し,さらに競技力を向上させることができるかの知見は必要となる.特にこのような観点からのトレーニングの生理学的応答などについては研究が必要となることだろう.
運動におけるインピーダンスを,負荷レベルと関節レベルで知ることはその競技特性を知るばかりでなく,さらに力学的にどの方向を目指してトレーニングを行うかの指針になる.これをインピーダンストレーニングと呼ぶことにする.将来,このような情報を利用し,質量以外の粘性抵抗などの力学抵抗を自由な方向に与えるインピーダンス制御(impedance control)トレーニング装置(ダイナミックトレーニング装置)が未来のトレーンングとなると考えている.
概念的な話に終止したが,とりあえずトレーニングや競技における力学的特徴を観察する場合は,
弾性的な性質を振る舞いをする運動:弾性係数,またはRJ指数を観察
弾性的な振る舞いを行わない運動:図8のグラフのように,トルク–角速度曲線を関節レベルで記述
することとよいだろう.
前者に関係して,RJ指数はマットスイッチで計測できる.トランポリン競技中の能力なら,モーションセンサなどで推定することも可能だろう.跳躍系はフォースプレートがあればなおよい.
後者の計測は,モーションセンサやモーションキャプチャなどで推定することができるだろう.
トレーニングは力学の理解でより豊かになると思う次第だ.
補足
補足1:動力伝達
効率よくエネルギーを伝達する問題は,「出力に余裕のある大きな部位から,必要とされる部位に伝達すること」で恐らく解決しているだろう.つまり何らかの重み付けがあるはずで,末梢に近い出力の弱い部分は動力を出力するよりは,他の部位からの伝達に寄与しながら,疲労などの負担を減らす作用が自然に働いていると考えられる.
これを裏付ける例が多くあるが,科学的に緻密に裏付けられた事実ではない.一般的に認知されている事実でもない.筆者がそうとしか思えないと考えているだけのことであることをお許しいただきたい.
この問題の物理的定式化は,ここで述べていくように力と速度によって,力学的エネルギーの時間変化率で考察する方法が恐らく有力な方法である.そこでこの問題は,本文で述べている目的最大化との対比で,効率という観点を含む「動力伝達最適分配」問題と述べるのが適切ではないかといまのところ考えている.
一般的に出力の大きな部位は体幹や下肢である.それも一箇所ではない.たとえば,消しゴムを指先で飛ばすような運動なら,指先の運動で事足りる.しかし少し重いドアを開けたり,手先に作用する力が大きくなるにつれて,その力は腕だけの力だけではまかなえなくなる.このため,大きく余裕のある部位からの伝達が必要となる.
また出力の大きい運動ほど動力源は,1箇所ではなく下肢と体幹を中心とした大きい部位に分散する.さらには左右の両脚を地面と接することで閉リンク(閉ループ)構造を構成し,さらに関節レベルでむしろ動かさない(速度が小さい)力発揮を行うことが多い.
このようなことをヒトはある意味自然と行い,動力源の分配を適切に配置している.一般に,それらの部位は末端から離れているので,「動力伝達」が必須となり,生物である以上そこに効率が求められる.
効率向上は,当然無駄の削減も含むことになるが,弱い部分の負担削減の意味を持つ.考えるべきは,必要なエネルギーをどのように最適に供給するかという言い方ができるだろう.
ちなみに,フォースプレートで左右の床反力を発揮した図9のような例を示せないのが残念だが,
に示すように,力学的エネルギーの変化量が多いから(エネルギーがたくさん流れているから)その場所が動力源とは限らない.動力源は複数の部位の協調によって生み出されている可能性もあり,特に図10のような閉ループ(閉リンク)構造を構成して動力発揮を行うときに注意して観察されたい.
貢献度という考え方は各関節の寄与に帰着させる考え方だが,それがそもそも誤りを引き起こす.また,運動方程式だけでは寄与は記述できない.しかし反対にエネルギーだけでも寄与は記述できない.身体運動のメカニズムを理解するには,ダイナミクスとエネルギーと両方の理解が重要だろう.
補足2:エネルギーと運動量
多くの違いがあるが,同じように運動の勢いを表す運動量$${m \bm{v}}$$と異なり,エネルギーは運動エネルギーと位置エネルギーに変換されたり,他のエネルギーに変換可能な点が異なる.
補足3:仕事とエネルギー
力学の教科書を読んでも,「エネルギー」と「仕事」の違いがわかりにくい.仕事を感覚的にのべることは少し躊躇するが,その定義を述べると物体に作用する一定の力を$${\bar{f}}$$とし,移動量を$${\Delta x}$$とすると,
$$
W =\bar{f} \Delta x
$$
となる,時間変化する力$${f(t)}$$が作用するなら
$$
W = \int f(t) dx
$$
と積分で記述される.
端的に述べると(わかりにくくなっている懸念はあるが)仕事は,「物体を移動させる際」にどれだけ頑張ったかを力と移動量の積で記述する.しかし,問題は物体が移動しなければ,いくら頑張っても仕事は零である.虚しい,したがって,その時間微分のパワーは運動強度の記述には適していないことは前章で述べた.「頑張り(力)と「効果(移動量)」の積である.
ではエネルギーは教科書では,「仕事をする能力」などとごく簡単に書かれている.これで,理解できるのだろうかと思うが,感覚的に理解できるように表現するのは筆者も難しい.
物体の質量を$${m}$$,速度ベクトルを$${\bm{v}}$$とすると,運動エネルギー$${\frac{1}{2}{m \bm{v}^T\bm{v}}}$$は一種の運動の勢いだが,運動量$${m\bm{v}}$$も勢いといってよいだろう.違いは速度の2乗か1乗かである.これが仕事をする能力と言える理由は,実はさきほどの仕事は運動エネルギーと一致する.どの古典力学の教科書にも書いているので,確認してみるとよいだろう.
つまり「仕事をした分だけ,物体の運動エネルギーの変化が表れる」.このロジックから述べると反対なのだが,エネルギーとは「仕事をする能力」と説明される理由のひとつだ.
参考文献
1)小林一敏,スポーツの達人になる方法(テクノライフ選書),オーム社,1999
2)機械系基礎工学4,機械力学,原文雄,朝倉書店,1996
3)フィットネスチェックハンドブック―体力測定に基づいたアスリートへの科学的支援―,独立行政法人日本スポーツ振興センター ハイパフォーマンススポーツセンター 国立スポーツ科学センター 監修,松林武生 編集,大修館書店



【著作権・転載・免責について】
権利の帰属
本ページに掲載されている記事,ソフトウェア,プログラムなどに関する著作権および工業所有権については,株式会社スポーツセンシングに帰属するものです.非営利目的で行う研究用途に限り,無償での使用を許可します.
転載
本ページの内容の転載については非営利目的に限り,本ページの引用であることを明記したうえで,自由に行えるものとします.
免責
本ページで掲載されている内容は,特定の条件下についての内容である場合があります. ソフトウェアやプログラム等,本ページの内容を参照して研究などを行う場合には,その点を十分に踏まえた上で,自己責任でご利用ください.また,本ページの掲載内容によって生じた一切の損害については,株式会社スポーツセンシングおよび著者はその責を負わないものとします.
【解析・受託開発について】
スポーツセンシングでは,豊富な知見を持つ,研究者や各種エンジニアが研究・開発のお手伝いをしております.研究・開発でお困りの方は,ぜひスポーツセンシングにご相談ください.
【例】
・データ解析の代行
・受託開発
(ハードウェア、組込みソフトウェア、PC/モバイルアプリ)
・測定システム構築に関するコンサルティング など
その他,幅広い分野をカバーしておりますので,まずはお気軽にお問い合わせください.
【データの計測について】
スポーツセンシング社のスタジオで,フォースプレートやモーションキャプチャを利用した計測も行えます.出力されるデータと,ここで示したプログラム(入力データの取り込み関数を少々改変する必要があるが)で,同様な解析を行えますので,まずはお気軽にお問い合わせください.