
【第4回】 mbotを使った研修

![]()
皆様 こんにちは。
SAKURAIです。
前回で一区切りがつきました。そして、今回からはmbotの基板についてより深くハードウェアとはどういうものか学んでいきます。
基板を構成する部品たち
まず、mbotの基板であるmCoreにはどの様な部品が乗っているのか?どのような構成なのかを学ぶために一つ一つの部品を細かく見ていくことにしました。
そこで見つけたのがこちら
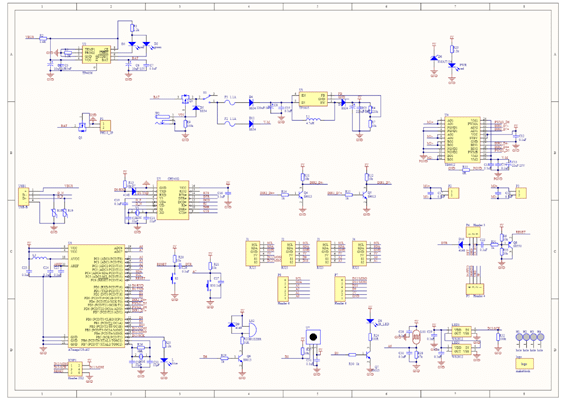
こちらmCoreの回路図になります。
初めに目にしたときはもう訳が分からず・・・。
これを一つ一つ理解することなどできるのかと思いました。
上司いわくこの回路図はとてもシンプルで分かり易い方だとか・・・
こういうものを理解できるようになるまで道は長いなと感じました。
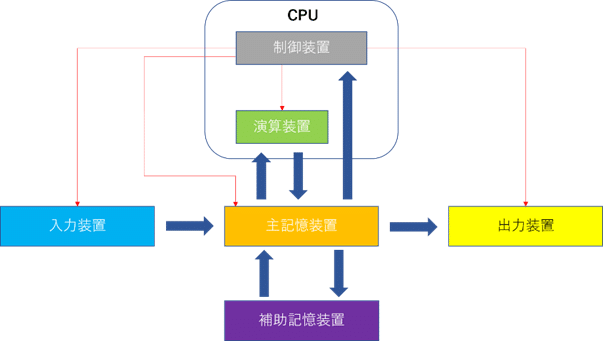
最初は回路図の中でも大きく描かれているCPUの部分について学習しました。
ここでCPUについて学ぶところから始めました。
この記事を読んで下さっている皆様でしたら「それくらい知ってる。」と思われるかも知れません。
しかし、私にとってはいざCPUって何?と聞かれるとふわっとした回答しかできないものです。
メモリーや周辺機器とのデータのやりとりを行う、言わばコンピュータの頭脳とも言えるもの。制御部、演算部、入出力部、記憶部と構成を知っている程度です。
そのためここでは改めてCPUとは?という初歩的な部分から講義を行って頂きながら学習しました。
そして次にCPUが他の部品やセンサーとどのように繋がっているのか?
インターフェースは何か?というところに入るのですがこれが私にとって凄まじく複雑で難解でした。
ATMEGA328-AU
高性能低消費電力AVR8ビットコアのマイコンです。
Arduinoにも使用されていますね。
このチップのピンごとに見ていきます。
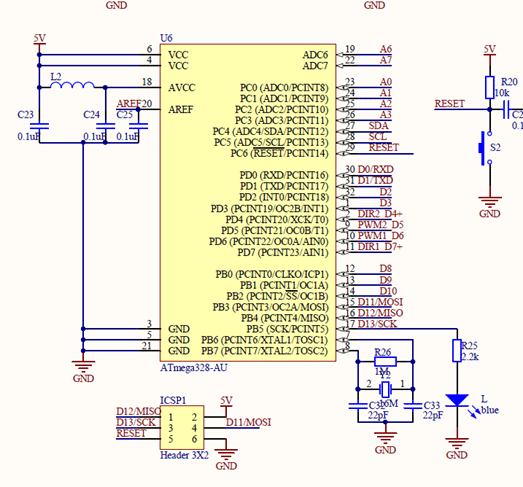
多過ぎる!
VCCは供給される電源ということはわかるが、それ以外のSDAやPWM、MOSIなど初見の文字ばかり。別の部品にも同じ文字があり対応したもの同士が繋がっているということは分かったため、内容を調べました。
つまり先程の英文字はすべて通信方式だということが分かりました。
I2CやUSART、SPIなどいくつか種類があり、それぞれに特徴があるということ。
PWMは、パルス幅を変えることで,ドライバーなどの素子に流れる電流の時間を変化させモーターを制御する信号。
自分での学習+講師の方に講義をして頂きました。いろいろ問題を出されましたが、正解がわからず、、、
むしろそれを教わるために講義受けていました。手間を取らせてしまって非常に申し訳ないと思っております。
学習していくと回路図もすこしずつ分かるようになるのが面白いところですね。
ここから○○に行って、そこからセンサーに繋がっているのだと流れが分かると読み易いです。
本日は以上になります。
もうしばらく学習の記事が続き、その後は私の製作したデモ機の内容に入って行きます。
もうしばらくお付き合いください。

この記事が気に入ったらサポートをしてみませんか?