
【可変形状ドローン】空中で再構成可能なクワッドコプターは墜落防止に役立つか?

カリフォルニア大学バークレー校(UC Berkeley)高性能ロボティクス研究所(High Performance Robotics Lab)が2019年に『International Conference on Robotics and Automation』(ICRA)で発表したパッシブモーフィングクワッドコプター(Passively Morphing Quadcopter)と思われる動画『Design and Control of a Midair-Reconfigurable Quadcopter using Unactuated Hinges』が先月(2021年12月)になって公開された。
■Design and Control of a Passively Morphing Quadcopter
『International Conference on Robotics and Automation』(Published: 2019年)「Design and Control of a Passively Morphing Quadcopter」
DOI: 10.1109/ICRA.2019.8794373
Midair-Reconfigurable Quadcopter
High Performance Robotics Lab(HiPeRLab)が開発したクワッドローター「Midair-Reconfigurable Quadcopter」は、バッテリーを消費するアクチュエーターやセンサーを使用しない非動力ヒンジでローターのアームを折り畳むことが可能な可変形状ドローン。プロペラが逆回転するか、回転を停止するとアームが折り畳まれる仕組みとなっている。
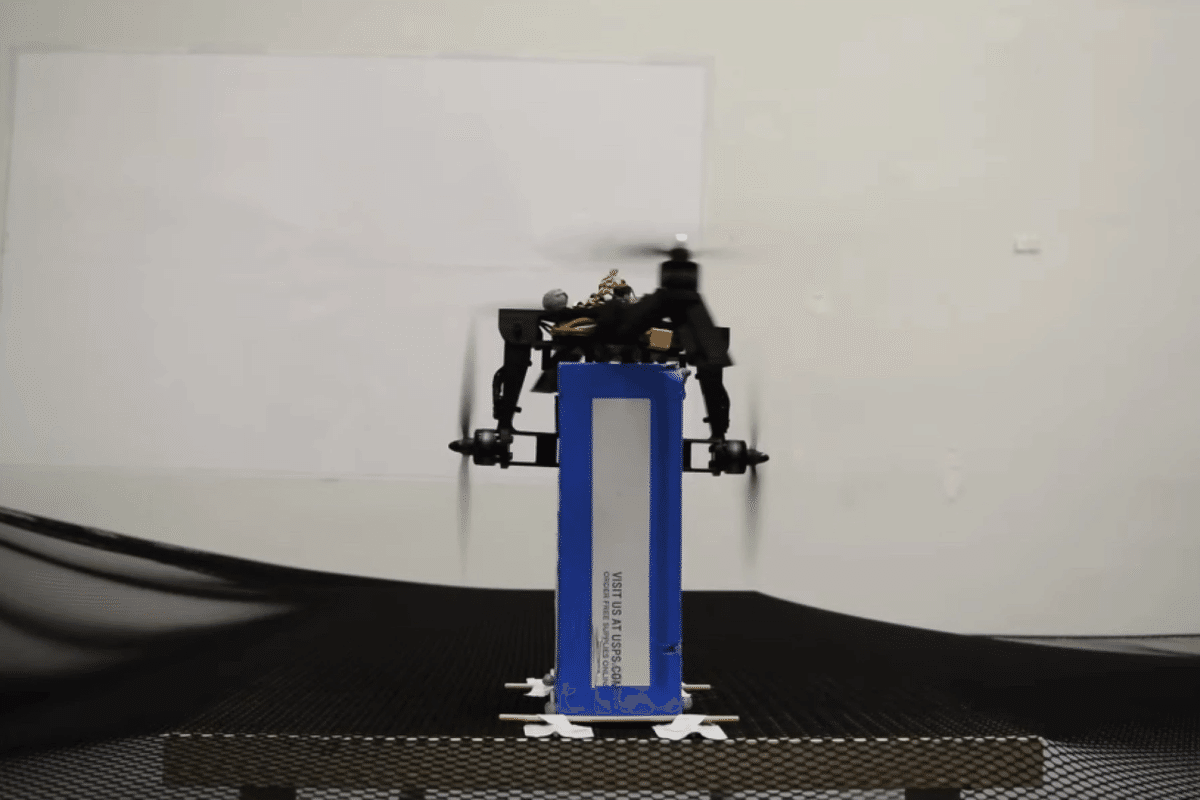
対角線上の2つのローターを逆回転させてアームを折り畳むことで物を挟んで保持し、バイコプター状態で持ち上げて空輸することもできる。また、瞬間的にローターを止めることによって障害物との衝突を回避したり、全てのローターを停止させて電線の上でバランスよく休憩することも可能である。

クワッドコプターの欠点
ビジョンベースでローターの1つが故障しても墜落を防止するアルゴリズムもあるが、一般的なクワッドコプター(クワッドローター)ドローンはローターの1つが故障したら制御を失う。
【ビジョンベースのMAV墜落防止】@davsca1 @sihao_sun @giov_cioffi @UZH_en @tudelft はクワッドローターの1つが故障してもオンボードビジョンでフォールトトレラント自律制御可能なアルゴリズムを発表。#ドローン
— Iwahori Toshiki 🛸 Drones guru (@iw_toshiki) January 21, 2021
《Vision based Navigation for Micro Aerial Vehicles》pic.twitter.com/paUYvY1rcY
墜落防止装置への応用に期待
よって、個人的には非動力ヒンジ機構をクワッドコプターの墜落防止装置として応用できないか興味がある。
エネルギー効率向上で環境負荷低減
さらに、クワッドコプターはバイコプターと比較すると推進効率が悪いが、空中でバイコプターに切り替えられることでエネルギー効率を高めバッテリーの消費を抑制できそうなのも「Midair-Reconfigurable Quadcopter」の魅力と言える。エネルギー効率向上で環境負担(環境負荷)低減にも繋がることだろう。
この記事が気に入ったらサポートをしてみませんか?