NASA/ESA の火星サンプルリターン計画の変更点について

日本時間の今日 0:00 から,NASA と ESA の火星サンプルリターン計画についての記者会見があり,先日行われた審査会の結果を受けての新たなアーキテクチャについて報告がありました。その直後のリリースがこちら。
本記事ではこれについて簡単にまとめようと思います。なお,この変更については先日 BBC News が報道していましたが,今回が公式発表となります。なお,正式な決定は 9 月になるそうです。
Mars Sample Return Campaign について
Mars Sample Return (MSR) 計画は,米航空宇宙局 (National Aeronautics and Space Administration, NASA) と欧州宇宙機関 (European Space Agency, ESA) の火星サンプルリターン計画です。これについては別記事でまとめたので,詳しくはそちらをご覧いただければと思います。
従来のミッション概要は下図がわかりやすいです。

簡単にまとめると,以下のようになります。
Sample Collection Mission: Perseverance (Mars 2020) がサンプルを採取しチューブに詰め,地面に落とす
Sample Retrieval Mission: Sample Retrieval Lander 2 (SRL2) によって運ばれた Sample Fetch Rover (SFR) が,地面からサンプルチューブを拾い,Sample Retrieval Lander 1 (SRL1) の元へ運ぶ
Sample Launcher Mission: SRL1 が SFR からサンプルチューブを受け取り,SRL1 によって運ばれた Mars Ascent Vehicle (MAV) によってサンプルを火星周回軌道に打ち上げる
Sample Return Mission: Earth Return Orbiter (ERO) がサンプルを周回軌道上で回収し,地球に持ち帰る
MSR 計画の問題点
上で述べた旧コンセプトでは,Sample Retrieval Mission にランダー 1 機とローバー 1 機が必要となります。すでに着陸した Perseverance,SRL1 と合わせ,全部で 3 機ものランダーが着陸することになるのです。これはいうまでもなく,高コストに貢献してしまいます。なお,先述の別記事で詳しく述べていますが,1 機のランダーで SFR と MAV の両方を運ぶことは技術的な・安全上の課題があり不適切と判断されました。
上の図からもわかるように,Perseverance の落としたサンプルチューブ回収に SFR を使っていますが,これは無駄が多い気がします。というのも,Perseverance 自身もローバーであるため,直接 SRL1 まで運べるように思えるからです。
ではなぜ SFR が予定されていたのか。Perseverance の稼働時間や寿命を考えたときに SRL1 まで運べない可能性があったからです。Perseverance が機能しなくなった場合,足のない SRL1 が遠くに落とされたサンプルを虚しく眺めることになってしまいます。そこでサンプルを拾い集め運ぶための SFR が用意され,SFR の着陸のために SRL2 も必要となっていました。
MSR 計画の変更点
さて,冒頭でも述べたように,先日 NASA と ESA は MSR の概念設計フェーズ (conceptual design phase) の審査会 (Systems Requirement Review) を行い,MSR 計画のアーキテクチャについて見直しを行いました。その結果,大きく以下の 3 つの変更が発表されました(記者会見)。
SFR の廃止
これに伴い SRL2 も不要となる
SRL1 にサンプル回収用の Sample Transfer Arm (STA) を搭載
元々 SRL1 には SFR からサンプルを回収し MAV に搭載するためのロボットアームが搭載される予定であったが,目的が変わり大型化する
SRL1 に Ingenuity クラスの 2 機の小型ヘリコプターを搭載
サンプル回収のバックアップとしての利用を想定している
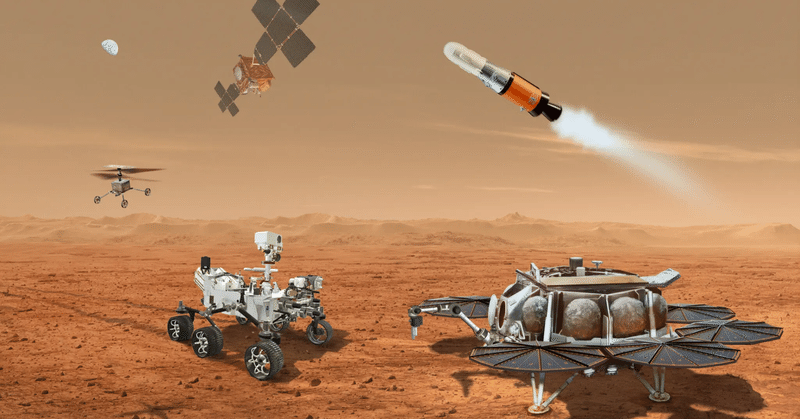
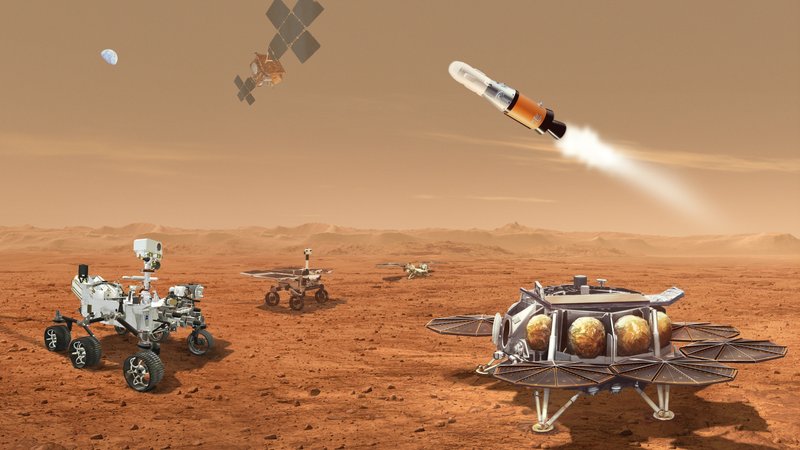
下図はこの新コンセプトのイメージ図です(本記事のトップ画像も同じもの)。参考までに,旧コンセプトのイメージ図も載せておきます。

コンセプト修正の動機
これらの変更により,前節で述べた課題が解決されます。上の記者会見では変更の動機について次の 3 つが挙げられています。
Perseverance の寿命や能力が,サンプルチューブを SRL1 の近くまで運ぶのに十分だと判断したため
Curiosity や Perseverance のこれまでの実績から,わざわざ別途 SFR を用意しなくても良さそうだと考えられた
保険として小型ヘリコプターも持っていく
ローバー(SFR)で回収するよりもランダー(SRL1)が直接回収した方がシンプルであるため
システムが複雑だとリスクが高まるしコストもかさむ
実際にランダー(SRL2)が 1 機減る
Ingenuity により,ヘリコプターがバックアップとして十分機能することが証明されたため
Perseverance が運んだ Ingenuity は,地球外で初の動力飛行を成し遂げただけでなく,ロバスト性や駆動性,稼働時間などでも想定を上回る実績を残した
ローバー(SFR)よりも圧倒的に軽く小型でサンプルチューブの回収を実現できる
なお,Curiosity の実績については以下の記事をご覧ください。
新コンセプトの詳細
以下では,新コンセプトに則り,旧コンセプトの SRL1 を単に SRL と呼びます。
SRL の STA は ESA が開発します。STA は多関節のロボットアーム(到達距離はおよそ 2.5 m)で,エンドエフェクタはサンプルチューブを掴む機構になります。STA はサンプルチューブを地面から拾うのみならず,Perseverance のチューブ回転台 (Bit Carousel) から直接回収することも検討されているようです。
すでに ESA 側の SFR の開発が進められている(Airbus UK が担当)中での変更ですが,ランダーやローバーが減ることは大きく,総コストは下がるとの見込みです。

2 機のヘリコプターについては,Ingenuity と異なり着陸脚の代わりに 4 つの小型の車輪が搭載され,走行による移動も可能となります。もちろん,サンプル回収のための小型アームも搭載されています。そのため Ingenuity よりも少し重くはなるものの,おおよそ同程度の大きさとなります。
2 機は独立に動き,SRL の STA の届かない範囲にあるサンプルチューブを 1 つずつ拾って,STA の届くところに落とします。あくまでバックアップという立ち位置ですが,もちろん SRL 付近の撮像など他のタスクをこなすポテンシャルはあります(実際 Ingenuity は工学実証機でありながらカメラを搭載していました)。

現時点では,MAV,ERO など,MSR 計画全体のアーキテクチャのその他の部分に関しては特に変更はなく,ERO の打ち上げが 2027 年の秋,SRL の打ち上げが 2028 年の夏の予定です。ERO がサンプルを地球に持ち帰るのは 2033 年になる見込みで,これは当初の計画通りとなり,見直しにも関わらず遅れはないようです。
Rosalind Franklin との関連
ESA の他の火星探査計画として ExoMars 計画の火星ローバー Rosalind Franklin があります。2022 年の打ち上げ予定でしたが,これは Roscosmos(ロシアの国営宇宙企業)との協力ミッションであり,昨今のウクライナ情勢を受けて協力関係は破棄され延期となってしまいました(参照)。NASA は Rosalind Franklin の遅れが SFR の開発の遅れにも繋がることを懸念し,SFR の廃止に至ったという経緯もあります。
なお,Rosalind Franklin を SFR に転用できないか?という考えもあるようですが,Rosalind Franklin は(Curiosity などと同様)生命の痕跡を探すその場観測のために設計された "mobile science laboratory" であり,サンプルチューブの回収や素早い移動には向いていないため,転用はできないとのことです。
コメント
今回の見直しに大変興奮しています!先日の BBC の発表以来興奮が収まらず,深夜の記者会見もリアタイ視聴してしまいました。イメージ図は何度見てもわくわくしてしまいます。
ちょうど今が NASA の Mars Pathfinder の着陸から 25 年の月というのも感慨深いです(当時私はまだ生まれていませんが……)。Mars Pathfinder は Sojourner という約 11 kg の小型のローバーを連れていきました。Sojourner は 1997年 7月5日に着陸機の Pathfinder から放出され,史上初めて地球以外で車輪によって走行したロボットとなりました。今では火星表面を大きなローバーが走り回っていますが,それもこの小さな最初の一歩があったからこそなのでしょう。

Ingenuity も Sojourner と似たような境遇と言えます。初めて地球外での動力飛行を成し遂げた Ingenuity の初フライト成功後には「今後の惑星探査が変わる」と言われていましたが,まさに Sojourner がローバーによる探査の世界を切り開いたのと同じく,これからは航空機による探査が盛んになっていくと思います。惑星探査のパラダイムシフトです。
とはいえ,まさかこんなにすぐに Ingenuity の功績が認められ実際に活躍する機会が与えられるとは……と驚きを隠せません。Ingenuity の開発チームの努力の功績だと思います。今回の判断は本当に嬉しかったのではないでしょうか?周りに無理だと言われながらも火星ヘリコプターを飛ばすことに注力してきた彼女ら彼らに感謝です。
これまで SFR の開発に携わってきた方々を気の毒には思いますが……チューブの画像認識などの技術は新たなヘリコプターにも当然使えると思うので,今後の STA やヘリコプターの開発に期待です。
飛行探査といえば,NASA の Dragonfly があります。こちらはタイタンの探査機で,火星の希薄な大気とは異なり地球の気圧よりも高いため,Ingenuity ほど飛行に苦労はしないのかなと思います。ですが,遠い天体での飛行探査はローバー以上に自律的な動作が求められるため,技術的に高度なことに変わりはありません。
MSR も Dragonfly も,そしてこれらに触発された将来の惑星飛行探査にも,非常に楽しみです!惑星探査の新時代を目の当たりにすることができて本当に光栄です。

この記事が気に入ったらサポートをしてみませんか?