
赤ちゃんロボットpopoを作ってみよう!

こんにちは、ユカイ工学のkurikitチームです!
2020年6月より続いていた、女子美術大学 × ユカイ工学kurikit 『ユカイなロボット開発プロジェクト』。
今回は制作作品の中から、『赤ちゃんロボットpopo』のつくりかたをご紹介します!
工作レベル:★★★★
制作時間:約75時間

材料と道具
・ユカイな生きものロボットキット
・ココロキット
・布(ポリエステル)
・綿
・手縫い糸
・黒い目のボタン
・ファスナー
作り方
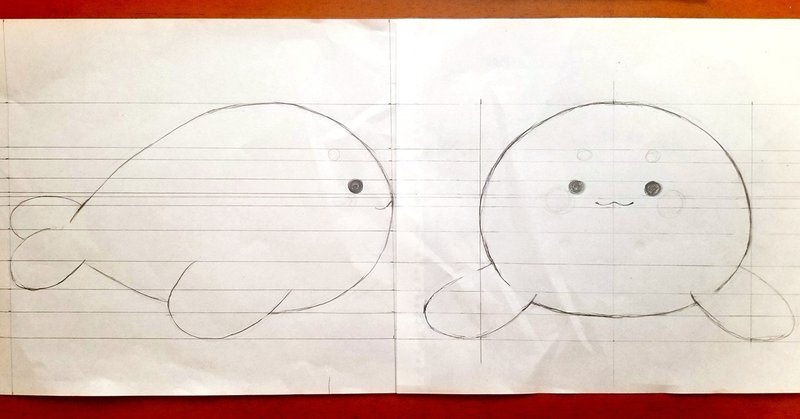
1. まず、ぬいぐるみの2面図を描きます。
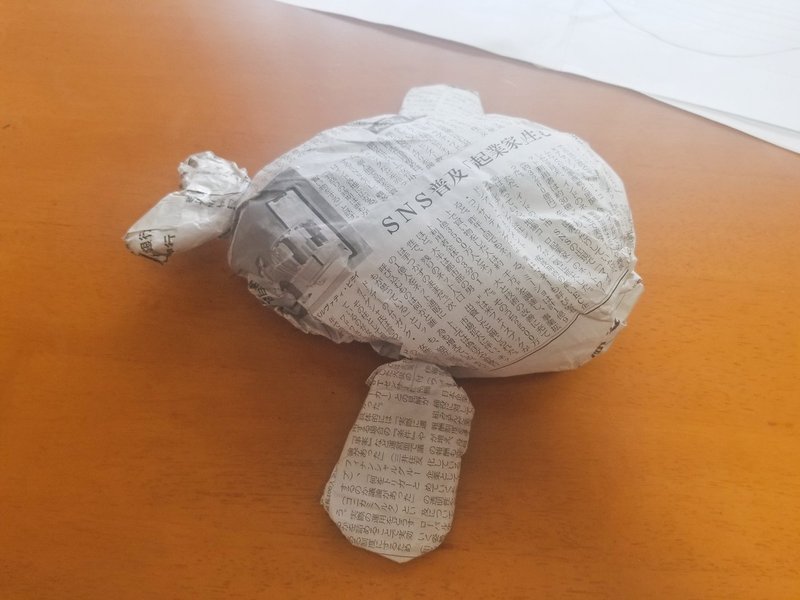
2. 新聞紙を丸めて立体に起こしてみます。
3. 紙で型紙を作ります。
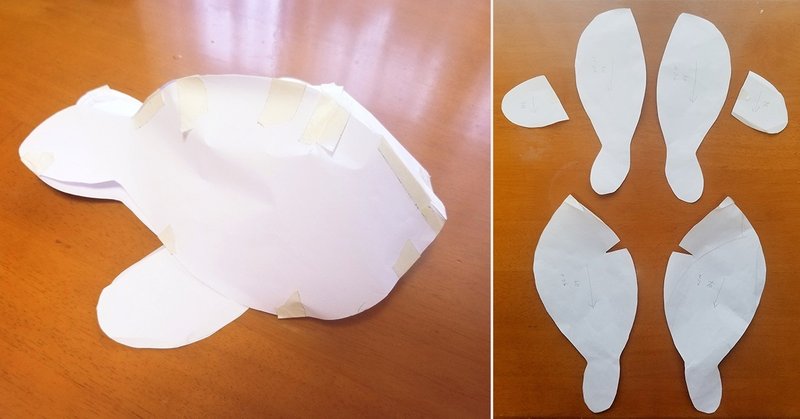
4. 型紙ができたら、布に書き写し、縫い代を約5mm付けてカットします。

5. 縫い合わせます!
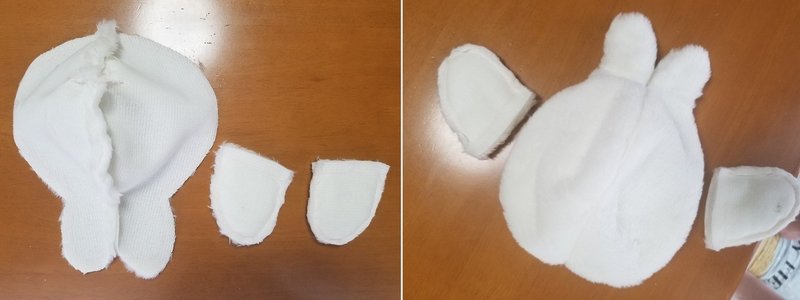
縫い合わせる際、お腹にココロキットを入れるファスナーを付けたいのでお腹は最後に縫います。
モーターも入れるのでヒレをつけるのも最後にします。
6. お腹とヒレ以外が縫い終わったら目や口をつけて顔を作ります。
綿を入れて目の位置を確認しました!
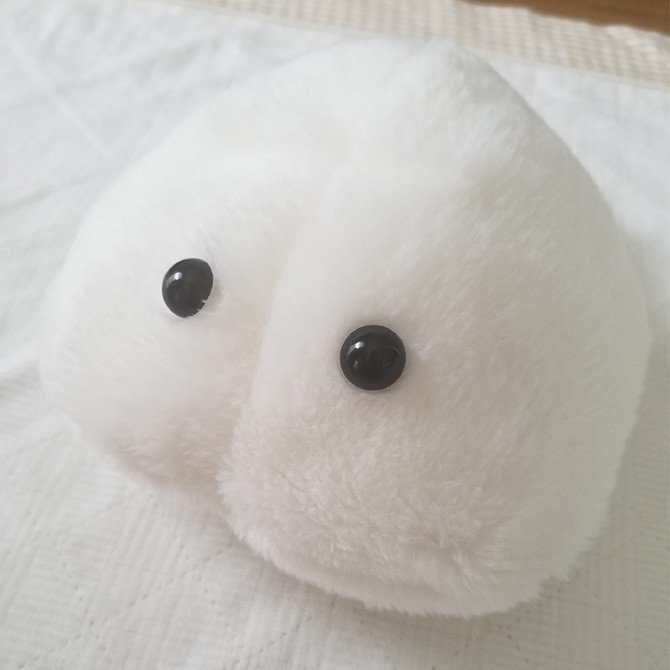
綿を入れてみたら顔がお尻のようになってしまいました…。
布は綿を入れると形が変わってしまうので、試しに何回も綿を入れてみて形を修正していきます!

popoのチャームポイントのまろまゆも付けて持っていた化粧品でチークを付けました。
7. 顔が完成したら、お腹にファスナーを付けていきます。

8. ファスナーが付けられたらヒレも付けていきます。

モーターはこのように入ります!
先に布とモーターを付けてしまうとヒレを体と縫い合わせるのが難しくなってしまったのでまだ布とモーターは縫い付けません。

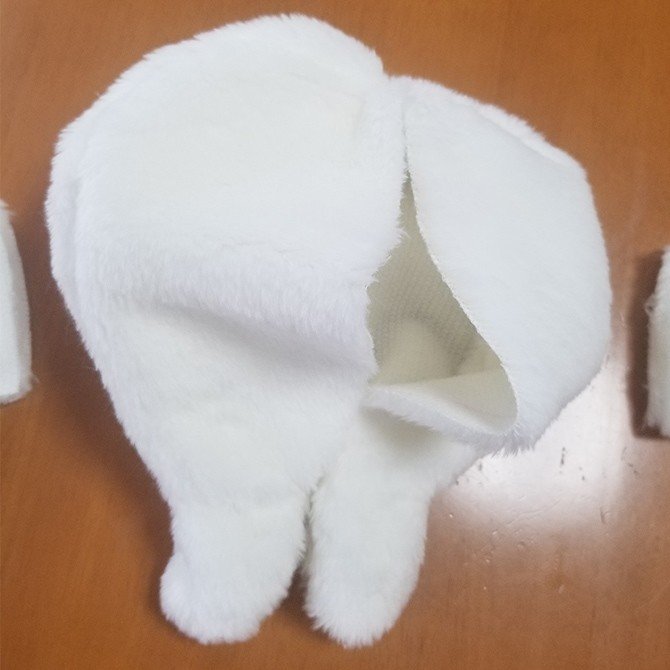
9. いよいよ中に綿とココロキット、モーターを入れていきます。

このように入れていくのですが、綿と機械を一緒に入れてしまうと結束バンドの回転が綿と絡んでしまったので、中に一枚布を入れて、綿の部屋とココロキット、モーターがある部屋で分けました。ですので、ファスナーを開けても綿が見えることはありません。
モーターは、中の布ともともとモーターに空いていた穴を利用して糸で固定しました。
10. 機械と綿を入れたらぬいぐるみの完成です!!


11. Scratchでプログラミングします。
popoは、声をかけたり音楽を流すとその音に反応してヒレをパタパタ上下に動かします。
今回は音量に応じて半回転するようにプログラミングしました!
無事にパタパタ動いてくれました!本当に生きているようで可愛いです!
12. popoに愛情を沢山注ぎます!

小さなサイズのpopoも制作しました!並べてみると可愛さが倍増します!!


抱っこしたり、撫でたり、声をかけたりしてpopoと癒しの時間を過ごしましょう!
製作者:井上夏帆(女子美術大学)
この記事が気に入ったらサポートをしてみませんか?