
宇宙探査・テラ-メカトロニクス研究室の紹介


宇宙探査・テラ-メカトロニクス研究室(飯塚研究室)の紹介をします!
ここでは,
1.ご覧になられる方へ,
2.飯塚研究室の特徴や雰囲気は?,
3.学生へのインタビュー,
の順で紹介させていただきます!
1. ご覧になられる方へ
みなさん,こんにちは! 飯塚研究室所属 システム理工学専攻 修士1年の五十嵐隆史です.
何かの縁でこの記事を発見していただきありがとうございます.おそらく,進路を考えている学生の方やその親御さんなどが興味を持っていただいたのかなと思います.機械系の研究室はどんなことをしているのか,研究生活とは何かなど,いろいろと知りたいことや少し不安に思っている部分もあると思います.そこでこの記事を通して飯塚研究室のことだけでなく研究活動について少しでも理解でき,イメージが膨らめばいいなと思います.では早速,紹介していきたいと思います!!
2.飯塚研究室の特徴や雰囲気は?
飯塚研究室の特徴としては研究を通してモノづくりができることだと思います.シミュレーションや動作解析などを行う研究室ではPC画面上で多くのことが完結してしまいますが,我々の研究室では実際に実験装置を作ったり,探査車や災害救助ロボットで使用するタイヤを作ったりと手を動かして何かものを作る機会は他の研究室と比べて圧倒的に多いと感じました.何か作ってみたい,作ったものを動かしてみたいと考えている方にとっては魅力的な環境だと思います.
研究室の雰囲気ですが,お互いがお互いの強みを生かして助け合う文化があるように感じます.どうしても研究をしていると思うように進まないことがありますが,その際に先輩や同学年の仲間,たまには後輩からアドバイスやヒントをもらい,行き詰っていた状況から脱出できたなんてことがよくあります. また,ほかの分野を研究している人とも話す機会があるので自分の研究分野以外のことも知ることができてとても楽しいです.

では, 研究分野について紹介していきたいと思います.
飯塚研究室では月面探査系,農業系,災害救助ロボット系と主にこの3分野について研究を行っています.(各研究の詳細については以下の学生へのインタビューをご覧ください)
月面探査系は主に月面探査機構周辺の研究をしています.月面環境はレゴリスと呼ばれる非常に細かい砂でできた軟弱地盤となっており,車輪が砂面に沈下してしまい動けなくなってしまうことが想定されます.そこで本研究室では走破性の高い車輪形状や移動方法の研究を行ってきました.困難な環境を想定しているため難しいこともありますが,今後発展していく宇宙開発分野に関わっているというワクワク感を持ちながら各々が研究に取り組んでいるように見受けられます.
次に,災害救助ロボット系の研究について紹介します.
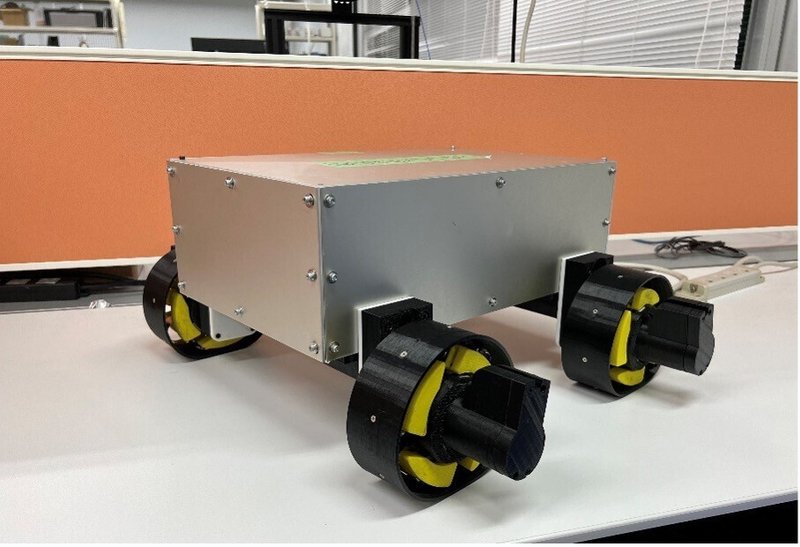
災害救助ロボット系の研究テーマは主に被災地での不整地盤環境で走行性能を維持する空気を用いずにタイヤの硬さを変更できる車輪の開発と走行性能の向上を目指しています.災害が頻発する日本では,災害直後の救助活動が非常に重要となります.災害現場の地盤環境は,瓦礫や泥,砂といった不整地盤であり,通常の車輪を用いたレスキューロボットでは走行効率が悪く,救助に多くの時間が費やされるという課題があります.それらの課題を解決するために,日々研究に取り組んでいます.
最後に農業系の研究について紹介します.
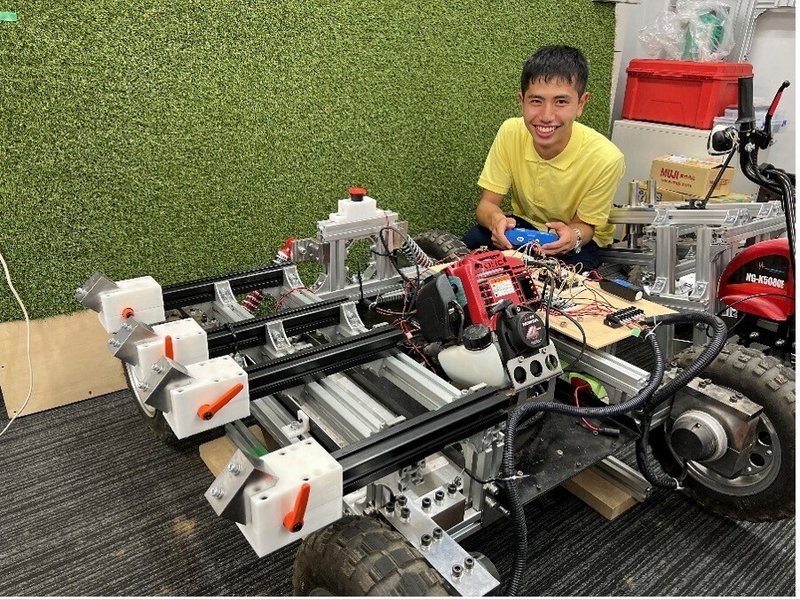
農業グループでは,畦畔用の草刈りロボットに関する研究を実際に製品化することを目指して行っております.畦畔走行時に横滑りを抑制するためにハード面とソフト面の両方からアプローチをしています.ハード面では,アウトリガー・キャンバ角機構という特殊な機構を取り付け,その効果を検証しています.ソフト面では,ドローンからの撮影された映像をもとに,横滑りを検知するとドローンからロボットへ横滑りを知らせるシステムを考えています.これらを組み合わせることで、人の手を介さず,自動で直進走行しながら草刈りができるロボットを目指して,日本の農業を救っていきたいと考えています.

飯塚研究室について学生の生の声を聴きたい方は以下のインタビューをご覧ください.より研究室のイメージが膨らむと思います!
3.学生へのインタビュー
3-1. 月面探査系
大塚さん
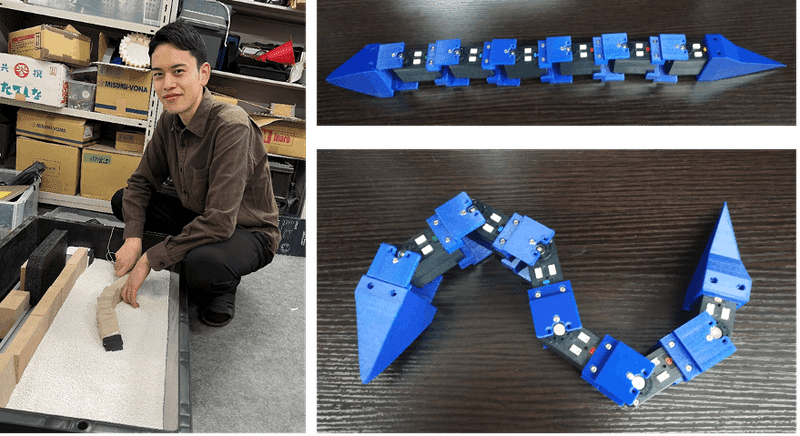
研究テーマ:生物の動きを模擬した月地中探査ロボットに関する研究
・研究内容を紹介してください
私の研究内容は月面探査ローバという,実際に月へ行き環境の調査をするロボットの新たな移動方法について取り組んでいます.現状のローバの課題として月表面上の環境では長期探査が難しいことが挙げられています.この課題に対して地中移動による探査方法ならば環境の影響を抑えられるとして,サンドフィッシュスキンクという砂中を移動する生物の動きに着目し,ローバの製作と動きの再現を行っています.現在,製作したローバにサンドフィッシュスキンクの体幹部の動きを再現させ,プラスティック粒子を用いた模擬環境下で生物の動きを模擬したローバと周囲の粒子の動きとの関係から,地中移動を可能にしている要因についての解析を行っています.
・この研究で最も苦労したところは何ですか?
生物の動きをロボットに応用するので,ロボットに生物の動きを再現できるようにするところがとても苦労しました.特に、生物の動きをロボットで表現するためのプログラミングの作成が難しかったです.当初は,ロボットの動きはカクカクしており,生物の動きとはほど遠いものでしたが,生物の滑らかな動きをロボットで再現するためにプログラムのコードを何度も調整していき,現在は滑らかに動かすことができ,研究を進めることができました.

・研究をしていて楽しかったこと,うれしかったことは何ですか?
生物の動きをプログラミングによって再現したロボットが,粒子中を前進したときがとてもうれしかった瞬間です.最初に製作したロボットだと,サーボモータのトルクが小さく,粒子中でサンドフィッシュスキンクの動きを再現できず,前進してくれませんでした.その失敗の経験を経て,新たにロボットを組み立てたところ,粒子中で前進する様子が確認でき,とてもうれしかったです.
・研究を通して得たものを教えてください
研究を通して得たものは,原因を追究する力です.以前製作したロボットが粒子中で前進しなかった際に,考えられる要因を挙げ,その一つ一つを検証していく中で,実際に前進できなかった原因を見つけ,その問題を解決できるように工夫するということを研究活動で繰り返してきました.
このことは他の研究でも同様に起こることだと思うので,これからの人はその過程を経験してほしいです.
・これから大学生になる方へ自分なりの意見があればどうぞ!!
大学生になると勉学や生活において,今までよりも様々な活動や選択ができるようになると思います.その中で自分が興味・関心があるものについては積極的に取り組んで,多くの経験をしていって欲しいと思います.それらの経験が,自身の成長になるので,色々なことに挑戦してください.
個別プロフィール
・名前
大塚 慧
・趣味・特技
スキューバダイビング
・夢や目標
まだ、世の中に無い製品を設計、開発に携わりたい
五十嵐さん
研究テーマ:小型軽量・月面探査ローバの地中サンプリングに関する研究
・研究内容を紹介してください
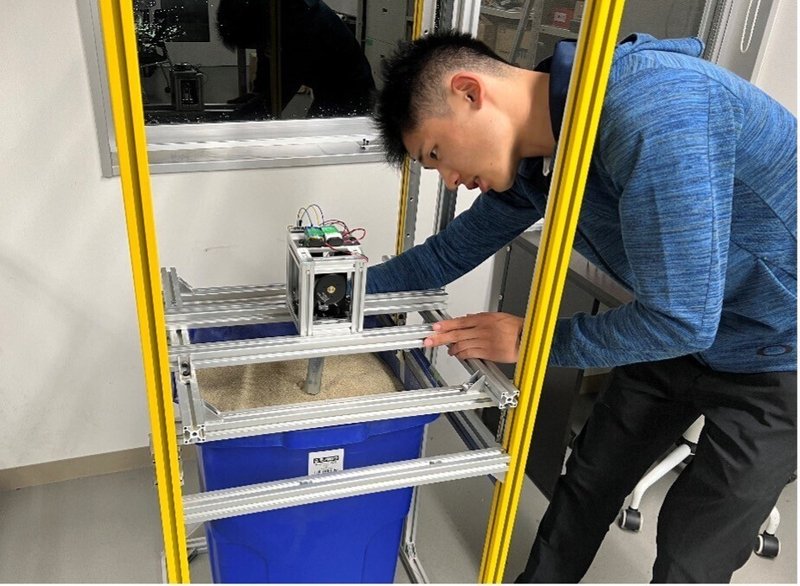
私は月地中探査に関する研究を行っております.月面はレゴリス(非常に細かい砂)で覆われており,月地中探査を行うことは地球の起源解明に貢献することや,今後月面基地建設の際に必要になります.しかし,月面環境で地中探査をする際,ロケットの積載量やコストの関係から大きな重機は簡単に持っていくことはできません.そこで小型軽量ローバでの地中探査の研究を行っています.地中にサンプル採取装置を貫入させていくのですが,レゴリスのような軟弱地盤に振動を与えると流動化し貫入しやすくなる特性があります.その特性を利用して地中サンプリングに関する研究を行っています.
・この研究で最も苦労したところは何ですか?
サンプル採取機構の開発です.月面環境を想定しているため制約が多く,それに適したように設計するのが難しかったです.試作品を何個も作っては試し,失敗し,原因を見つけ改良案を考え,また作り直す,その繰り返しでした.いつ完成するかは自分の想像・創造力次第だったので見通しを立てづらいのが余計に大変でした.
・研究をしていて楽しかったこと、うれしかったことは何ですか?
サンプル採取機構が完成したときはもちろんうれしかったですが,初めて3DCADで設計したものを3Dプリンターで印刷して形になって現れたときは感動しました.自分で物を作れる喜びを味わったように感じます.研究が進むにつれて喜びを味わったり感動したりしている余裕はあっという間に消えてなくなりましたが、、、(笑)
・これから大学生になる方へ自分なりの意見があればどうぞ!!
自分の知的好奇心の赴くままに進めばいいと思います.進路に悩まれている方もいるかもしれませんが自分で考えて納得して選んだ道ならどれも正解だと思います.
個別プロフィール
・名前 五十嵐隆史
・趣味・特技 読書,トライアスロン
・夢や目標
自分のやりたいこと(大きいことから小さいことまで)できるだけやりきる!
3.2 災害救助ロボット系
関さん
研究テーマ:災害救助用UGV用可変剛性車輪の走行性能に関する研究

・研究内容を紹介してください
災害大国と呼ばれる日本ではレスキューロボットの需要が高まっており,危険性の高い災害現場で迅速な救助活動を可能とするため無人陸上車両の導入が必要だと考えています.しかし従来の車輪ではがれきによるパンクや,軟弱地盤によるスタックで走行困難に至る状況が見られます.そこで以上の課題点を克服できる硬さを調節できる車輪(以降:可変剛性車輪)を提案し,実用化に向けた実験的検証を行ってきました.可変剛性車輪の有効性を得るために,可変剛性車輪を搭載させたUGVの走行性能について,「走行しながら車輪を剛性変化させる」方法を提案し,不整地走行性能が従来の車輪より向上したか実験を行ってきました.
・研究をしていて楽しかったこと、うれしかったことは何ですか?
改良した可変剛性車輪が負荷を加えた状態で正常に剛性変化できたことや,走行しながら剛性変化させることによって最も理想的な走行が確認できたこと等,自分が設計・製作した可変剛性車輪の有効性を得られたことが一番うれしかったです.また,飯塚研の同期,先輩方が優しくて気軽に相談ができる恵まれた環境で,思う存分に研究ができることに感謝しています.

・研究を通して得たものを教えてください
大まかにいえばマネジメント能力です.この研究をしていくうえで,最終的にどういったテーマで研究をするのか決めるまでの手順が重要だと思いました.ただただ先行研究の課題点を探し,解決することだけでは研究は成立しません.実際にどのような社会的課題が存在しているのか自分で改めて整理しなおして,自分が研究したいことが社会貢献にどうつながるのか,またはそれが将来実用化される+実現されるのか,総合的に幅広く見ていく必要があるということを学びました.
・これから大学生になる方へ自分なりの意見があればどうぞ!!
どんな研究をしたいかって?それだったら直接芝浦まで来て体感したほうがいいよ!
個別プロフィール
・名前 関圭太郎
・趣味・特技 スポーツを楽しむこと,ロードバイク,折り紙
・大学生活を通して気づいたこと
自分だけ耳が聞こえなくてもそれはみんな同じ.なぜならみんな違う人.だからこそ自主性と自分を持ち続けることは重要である
藤村さん
研究テーマ:被災地走行用ロボットの地盤判別機能について

・研究内容を紹介してください
僕の研究では,レスキューロボットが被災地を走行するためのシステムの開発を行っています.昨年度は,地盤判別とトラクションコントロールを統合し,走行する路面に応じて駆動力制御の仕方を変えるシステムや,ロボットの前方を歩く人を自動で追従するシステムを開発しました.
・この研究で最も苦労したところは何ですか?
自分でプログラムを作成しローバの制御を行っていましたが,そのプログラム作成に苦労しました.多くの場合,プログラムを作成し実際に動かしてみても,1回でうまく作動することはありません.はじめは思い通りに動かず,プログラムの修正,ローバの作動という作業を繰り返します.このトライ&エラーを繰り返しながらシステムを完成させる工程に苦労しました.
・研究を通して得たものを教えてください
私はソフトウェアやローバの開発を中心に行っていましたので,プログラミングの基本的な知識や回路の制作方法を学ぶことができました.また,研究生活を通して物事の仕組みや成り立ちを考える癖が身に付きました.ローバを動かすプログラムを作成する際も,車両に作用する力学的な関係を考えなければなりませんので,そのあたりは常に考えながら開発しています.
個人プロフィール
・名前:藤村寛大
・趣味:運動(ボルダリング、ランニング)
・尊敬する人:高校の英語の先生
・高校時代の部活:陸上部
3.3 農業系
土田さん
研究テーマ:畦畔用の草刈りロボットに関する研究
・研究内容を紹介してください
私は,畦畔用の草刈りロボットに関する研究をしています.畦畔とは,水田の周りを囲うように作られた盛土部分のことを指します.畦畔は急斜面となっており,人の手で草刈り作業を行うのは危険を伴います.そのため,畦畔用の除草ロボットが必要とされています.しかし,ロボットが畦畔を横断走行する際,重力の影響などにより横滑りという現象が起きてしまいます.横滑りが起きると,除草効率の低下や車体の転倒などに繋がってしまうため,横滑りを抑制することは非常に重要な課題となっています.そこで私たちの研究グループでは,横滑りを抑制するための手段としてアウトリガー・キャンバ角機構というものが提案されました.アウトリガーとは,通常高所作業車などで使用され,車体から腕のようなものを張り出すことで転倒防止などの役割を持ちます.実際に私たちの研究グループでは下の画像のようなロボットを製作しました.最終的な目標として,横滑りせず直進しなら人の手を介さず自動で草刈りを行えるようにすることを目指しています.

・この研究で最も苦労したところは何ですか?
アウトリガーの部分の脚の長さをモータで変えられるようにしたかったのですが,重量の問題やかなり負荷がかかってしまうこともあり,使用予定だったモータのトルクが足りませんでした.ほかのモータを探したのですが,なかなか条件に合うものがなく,時間もあまりなかったので,モータで長
さを変更するのをあきらめ,手動で調節するようにしました.
また実験が本当に大変でした.製作したロボットはあまり小回りが利かないので,スタート位置にセッティングするのに100kg以上あるロボットを4人で持ち上げるのが大変でした.

・研究をしていて楽しかったこと、うれしかったことは何ですか?
同じ研究グループの先輩に,ものづくりの基本的なことなど様々なことを教えていただき,少しずつできることが増えていくのが楽しかったです.また,先輩や教授とどうすれば横滑りをより抑制することができるかなどを相談しながら,様々な方法を実験で試していく中で,横滑りせずに走行したときはとても嬉しく,この研究をやっていてよかったなと思いました.
・これから大学生になる方へ自分なりの意見があればどうぞ!!
大学では学びたいことは何でも学べ,好きなことも自由にできます.いろいろなことにチャレンジしてみてください!
個別プロフィール
・名前:土田悠斗
・趣味・特技:サッカー
・尊敬する人:中学時代のサッカー部のコーチ
・夢や目標:いつか,あまり強くない,勝てないサッカーチームを指導して少しずつ強くして勝てるチームに育てたいです。
この記事が気に入ったらサポートをしてみませんか?