世界に対抗するファーロスターの「ロボット戦略」とは

みなさん、こんにちは!ファーロスターnote編集部です。
株式投資型クラウドファンディングがスタートし、多くの応援をいただいていますこと心から感謝申し上げます!
クラウドファンディングの応募は5月23日(木)22時までとなりますので、応援よろしくお願いします!
(ページの最後にお申込みURLがございます。よろしかったらご訪問ください。)
さて、このクラウドファンディングがスタートすると様々な質問をいただくようになりました。
今回は、「海外の4足歩行ロボットが先行しているのに、これからファーロスターの4足歩行ロボット「Usampo(うさんぽ)」はこれらに対抗できるのか」というご質問がございましたので、お答えしたいと思います。
ファーロスターのロボット戦略とは?いったいどういう戦略でしょう。
結論、海外のロボットに対抗できます!
対抗できる主な理由は、次のとおりです。
独自のプログラムで開発していること
不整地走行を前提として当初から設計していること
活用分野を「荷物の搬送用」としていること
課題を明確にし段階を踏んだステップ開発方式の採用
Ai映像解析エンジン「Rabbit Eyes」の搭載
これらの理由を説明する前に、4足歩行ロボットの背景に着目して解説しましょう。
4足歩行ロボットが注目される背景
4足歩行ロボットの開発は、さまざまな理由から推進されるようになりました。ここではいくつかの主な理由をご紹介します。
過酷な環境への対応
例えば、福島第一原子力発電所の事故後、放射線量が高く人が立ち入ることができない場所での作業が求められました。これらの環境では、4足歩行ロボットが有用であると考えられ、その開発が進められました。
商用化の影響
Boston Dynamicsの4足歩行ロボットであるSpotが商用化されたことが、4足歩行ロボットの開発の火付け役となりました。その後、中国を中心にSpotに似たロボットが多く登場するようになりました。
技術の進歩
機械学習の進歩により、ロボットは転倒や段差の踏み外しといった不測の事態で姿勢が崩れても、瞬時に対応して姿勢を戻す能力を持つようになりました。
これらの要素は、4足歩行ロボットの開発を推進する大きな動機となりました。それぞれのロボットは、特定の目的や環境に最適化されています。そのため、4足歩行ロボットの開発は、これからもさまざまな形で進化し続けると思われます。
4足歩行ロボットが活用されている分野
次に、実際に活用されている分野についてご紹介します。
建設現場
建設現場でのデータ収集や見回り確認を支援しています。竹中工務店と鹿島建設は四足歩行ロボット「Spot」を活用しています。また、大成建設は遠隔巡回システム「T-IRemote Inspection」を開発し、4足歩行ロボットを活用しています。
工場やプラント
工場やプラントでのデータ収集や見回り確認を支援しています。例えば、オーストラリアの自然ガスを扱うWoodside Energy社では、Spotがガスプロセシングのモニタリングを代行しています。
警備
日本IBMは、中部国際空港(セントレア、愛知県常滑市)において、AI搭載ロボットを活用した空港警備業務の実証実験を行っています。現場の警備担当者が携わる警備業務の一部をAI搭載ロボットで代替可能かを検証しています。また、アメリカのマサチューセッツ州警察では、実際の監視目的で実際の事件の現場などに4足歩行ロボットを導入しています。
公園管理
シンガポールでは公園を巡回し、ソーシャルディスタンス確保の警告を出すために4足歩行ロボットが登場しました。
これらの例からもわかるように、4足歩行ロボットはその機動性と安定性から様々な分野で活用されています。これらのロボットは、危険な環境での作業を代行したり、遠隔地からの操作を可能にしたりすることで、作業の効率化や安全性の向上に貢献しています。また、人材不足を補う上でも4足歩行ロボットの活用が重要な位置付けとなってきました。
しかし、全ての分野で活用されているわけではありません。
4足歩行ロボットが発展途上の分野
4足歩行ロボットは、なぜ全ての分野で活用されてないのでしょうか。
それは、苦手とする分野が存在しているからです。
この分野を理解することでファーロスターのロボットが海外製品に対抗できるのかが見えてくると思います。
大規模災害
2024年1月1日に発生した能登半島地震においては陸上自衛隊において、アメリカのGhost Robotics社のVision 60という4足歩行ロボットが試験的に投入され、陸上自衛官の操縦のもとで避難者の誘導支援、避難経路上の偵察が行われました。
荷物の搬送
4足歩行ロボットは一定の荷物を搬送する能力を持っていますが、重たい荷物の搬送はまだ困難です。
人の輸送
こちらも荷物の搬送と同様に商用化には至っていません。
このように4足歩行ロボットが発展途上の分野が存在します。
では、なぜ発展途上なのでしょうか。
なぜ発展途上なのか
技術面と発展途上の分野について解説します。
技術面
次の3点ご紹介します。
一点目、4足歩行ロボットのソフトウェアはオープンソースを利用していること。このためゼロから開発する必要はありませんが、改修できる範囲が限られてしまうこと。
二点目、不整地走行を設計当初から組み込んでいないこと。最初は整地走行での走行を目指しているため、後から不整地を走行させる場合、足の形や動作確度、強度、重量バランスなど全てを見直すことになるため開発コストと時間がかかり断念することが多くなっています。
三点目、荷物搬送は機体が大きくなるため手を出しづらいこと。
他にも要因は多くありますが、それぞれの分野での専用設計が必要なことはご理解いただけるのではと思います。
例えば自動車の場合、普通自動車を開発した後で、F-1レースに出られるように改修したいとか、オフロード走行したり、水場を走りたいので改修したいと言っても普通自動車を改修するのではなく、それぞれの分野あった専用設計にするのと同じことだと言えます。
実は、ここがとても重要なポイントになります。
災害時での活用
災害現場は予測が困難で、地質・地盤の条件や障害物の存在など、自律制御が難しい環境が多いです。また、災害発生時のロボット技術運用上の課題として、遠隔操作の作業効率や通信環境の確保などが挙げられます。これらの課題を克服するためには、さらなる技術開発と研究が必要です。
荷物の搬送
4足歩行ロボットは一定の荷物を運搬する能力を持っていますが、重い荷物や特殊な形状の荷物の運搬はまだ困難です。また、安全性の確保や作業効率の向上など、荷物の運搬に関するさまざまな課題が存在します。
人の輸送
4足歩行ロボットが人を輸送するためには、高い安全性と快適性が求められます。現在の技術では、これらを十分に満たすことが難しいです。また、ロボットの速度や機動性、乗り心地など、人の輸送に関する多くの要素が改善の余地があります。
これらの分野で4足歩行ロボットが活用されるためには、さらなる技術開発と研究が必要です。それぞれの分野における具体的な課題を解決することで、4足歩行ロボットの活用範囲は広がるでしょう。
ファーロスターの「ロボット戦略」とは
ファーロスターは発展途上分野に着目し、用途、開発方法などを分析し、どうあるべきかに立ち返り開発を進めました。
ファーロスターの着目する分野からお話します。
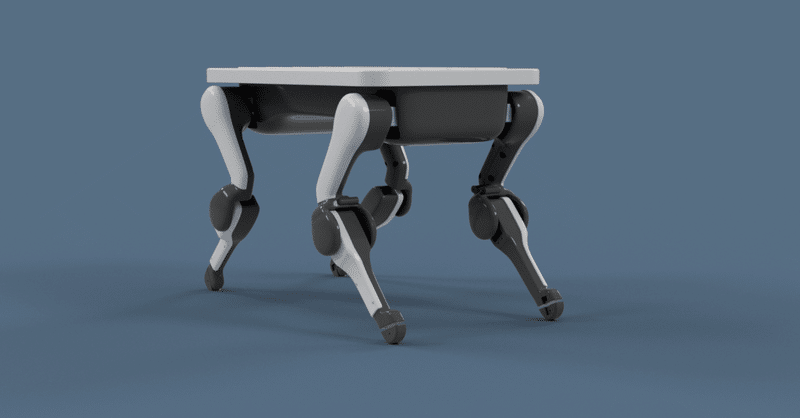
着目する分野は荷物搬送用
ファーロスターが目指す世界の一つは「再配達をゼロにする」ことです。これからの宅配事業では労働力の減少が否応なく進行しています。そのため、人の代わりに荷物を運ぶという行為をロボットに任せることで、そんな世界を作る必要があるのです。
特に、人が運べる重量(20kg~50kg)に留意し、仕様を考えました。自宅でも、お水を届けていただいていますので、その水(30kg)を楽に運べるように設計することを考えています。
災害時での活用
我が国では大規模災害続いています。能登半島地震において重機が入れない、ヘリが着陸できない状態となり、荷物は全て人が運びました。
このような事態が起きても、ロボットによる荷物の自動搬送が可能となれば多くの方々のお役に立てると考えています。
独自のプログラムで構成
ロボットを動かすためにはプログラムが必要です。前述のように一般的にはオープンソースをそのまま使うことがありますが、それでは機能に幅を持たせることが難しく、完成後の修正も困難が予想されます。
海外製品が不整地走行を苦手とする理由もここにあると考えるからです。
ファーロスターは、主軸となるプログラムを独自に作成することで、機能の幅を広げる設計としています。また、不整地や重量物のバランスを取るなど、組み合わせることも可能です。海外製品に比べて、機能の追加やカスタマイズが容易なのも特徴の一つです。さらに、国内で開発しているため、より安心してご利用いただけると思います。
ファーロスターのロボット開発の方法
開発は目的を絞ることからスタートします。ですので、荷物搬送用に特化して開発を進めることとしました。
開発方法
開発はステップ開発方式で実施します。この方式は量産に向けて技術的な課題を明確にし、その課題を一つずつクリアして進める方法です。
00走行試験シミュレーション
走行プログラムを作成し、実際に走行できるかシミュレーション解析を行います。
01走行試験機
シミュレーション解析を基に、実際のモックアップモデルを作成し走行させてみます。
02追従走行試験機
別途開発したAi映像解析エンジン「Rabbit Eyes」を搭載し物体認識、追従走行を実証しました。
詳しくは「4足歩行ロボット「Usampo 02」開発ストーリー」をご覧ください。
03転倒回復試験機(今ここ)
現在、この段階です。転倒しても回復する機能を持たせて試験を実施します。
04不整地・階段走行試験機
災害時や日本特有の階段道などを走行できるように設計し、試験を実施します。
05量産開発機
00~04までの成果を全て入れ込んだ量産を前提とした機体の開発を行います。ここが最も難しいポイントとなります。
短期間で開発ができるようになったのは3Dプリンタの登場によります。これまでは部品を一つ一つ発注して手作業で作っていただいていましたが、3Dプリンタを活用することで数日で納品されるようになり、開発期間が短縮され開発コストを低減することが可能となりました。
ファーロスターのロボットはそれだけではない
ファーロスターが開発している空飛ぶ船の操縦は自動化を目指しています。物体を認識して衝突を回避する能力と、都市交通自動管制システム(UMTCs)の管制を受け衝突を回避する能力を持つことで空飛ぶ船の安全性を高める計画です。
この機能をUsampoに持たせて、空飛ぶ船に搭乗させ操船させる。これがファーロスターのロボットのもう一つの役割となります。
STAR WARSの世界感
1977年に公開されたスターウォーズ エピソード4 において反乱同盟がXウィング・スターファイターでデススターを攻撃するシーンがありました。
このXウィング・スターファイターの後席には副操縦士としてR2-D2というドロイド(ロボット)が収まり、ナビゲーションを担当していたのをご存じでしょうか。
ファーロスターの空飛ぶ船にもUsampoが搭乗し、操船を担当することになります。なんだかワクワクしませんか♪
将来の運用
空飛ぶ船は港に行けば借りることが可能となります。もちろん、所有することもできます。その際には、自宅で荷物を運んだり警備したりしているUsampoを連れて行き、空飛ぶ船に搭載します。
みなさんは空飛ぶ船に乗り込み、Usampoに行き先を伝えれば、UsampoがUMTCsの自動管制を受けつつ自動的に目的地まで安全に操縦し、運んでくれます。
こんな世界を目指しているのがファーロスターです!!
まとめ
ここまで世界に対抗するファーロスターのロボット戦略についてお話しました。ファーロスターはなぜ世界に対抗できるのかについてまとめたいと思います。
ファーロスターのロボットは、
・独自のプログラムで開発していること
・不整地走行を前提として設計していること
・活用分野を「荷物の搬送用」としていること
・課題を明確にし段階を踏んだステップ開発方式の採用
・そしてAI映像解析エンジン「Rabbit Eyes」を搭載しています。
ファーロスターは、国産技術にこだわり、みなさまに安心してお使いいただけることを目指しています。
ファーロスターが描く世界
ここまで4足歩行ロボットについてお話してきました。ファーロスターが描く世界感を少しでも多くの方に知っていただければ幸いです。
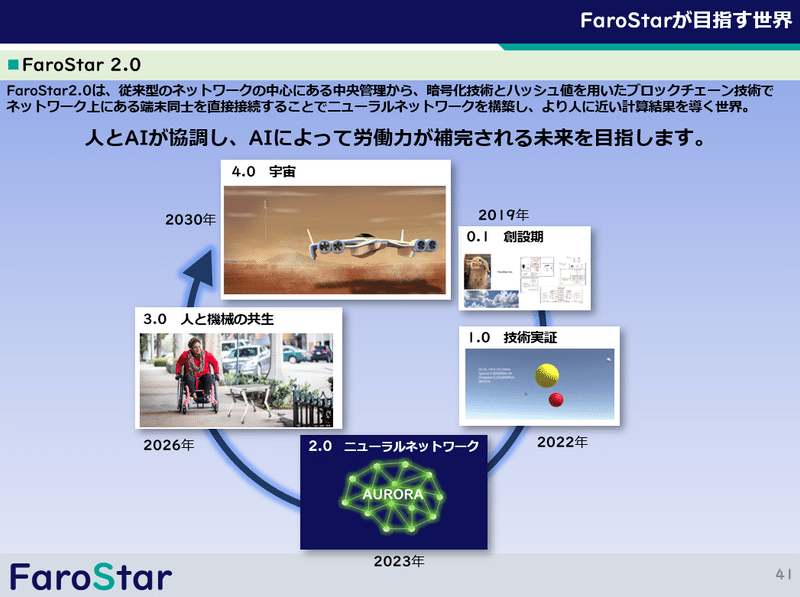
設立当初からファーロスターが描く世界を「Stargazer計画」という形でまとめ、この計画に基づき開発を進めてきました。
これまでFaroStar0.1「創設期」(2019年)、FaroStar1.0「技術実証期」を経て、現在、FaroStar2.0「ニューラルネットワーク」の段階に進んでいます。その後、2026年にはFaroStar3.0「人と機械の共生」を実現し、最終的には2030年代FaroStar4.0「宇宙」を目指します。
「Stargazer計画」については別途、noteでお話できればと思います。
最後に
ファーロスターは、日本の技術を用いて多くの方々の役に立つように開発を進めています。私たちは心から、技術の力で人々の生活をより良くすることができると信じています。そして、その信念が私たちを前進させ、新たな挑戦へと駆り立てます。
これからも、ファーロスターの取り組みをご理解いただき、ご支援いただけますよう、お願い申し上げます。
この記事が気に入ったらサポートをしてみませんか?