
回転翼航空機の離着陸

6月初旬から飛行訓練毎に投稿しようと思っていたのですが敢えなく挫折w
ひとまず実地試験に向け初心に帰って地上研究をしていることをnoteに書きます。
前回までの記事はこちら↓
今回はヘリコプターの離着陸方法についてロビンソンR44の諸元をモデルに記載していきます。
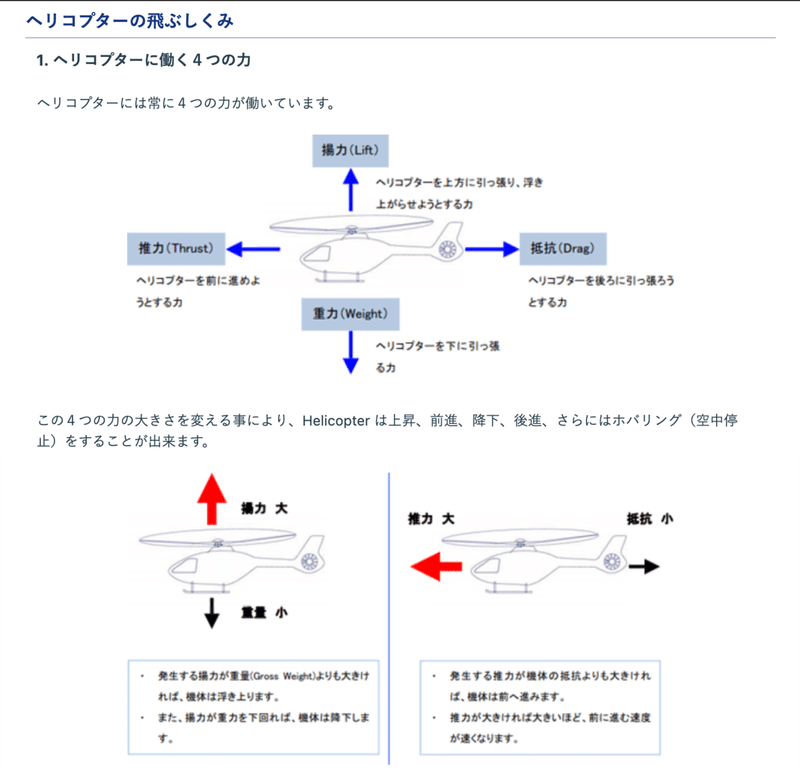
ところで、回転翼航空機(ヘリコプター)は車のような二次元の乗り物とは異なり、縦横高さの三次元空間の中で常に両手両足を使ってコントロールしながら飛行姿勢を保っていることはご存知でしょうか?
ブレーキを踏めば止まるという乗り物ではなく、操縦しなければ落ちる乗り物なので安全に運航するには技術が必要になります。
ヘリコプター特性や操縦の原理についてはAIRBUS社のWEBサイトをご覧いただければ分かりやすいでここでは割愛しますが、操作する舵のごとの特性を踏まえながらコーディネーションする必要になります。(下記AIRBUS社HPから引用)
操縦の中で基本中の基本といえど、難しいのは離着陸操作。
止まっていた機体を動かす、動いていた機体を止める。
エネルギーを0か1にする操作なので動く物体に対しての変化が大きく、その分操縦も難しくなります。
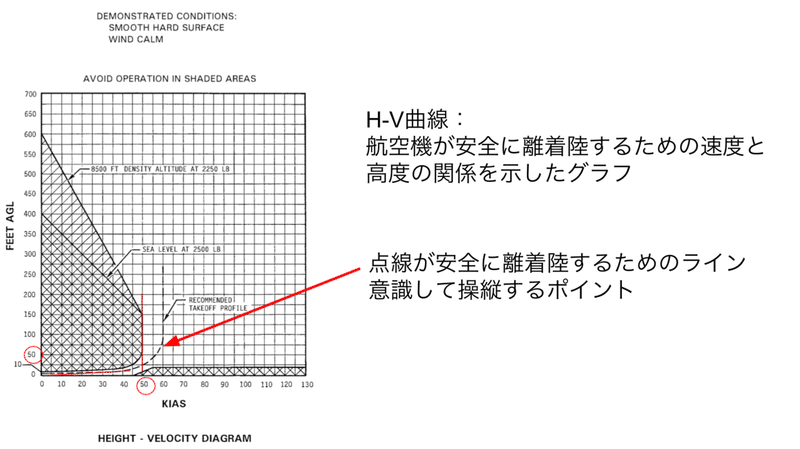
また、ヘリコプターは対気速度と高度の関係で危険領域(H-V曲線)があり、安全運航ができる領域を定められています。
パイロットはその領域を意識した操縦を心がけ、常に安全確実に運航できるようにしています。(下図:ロビンソンR44のH-V曲線の例)
飛行環境に応じて、この領域を意識し回避するような離着陸方法があるので、今回はそれらをスライドでまとめてみました。(飛行訓練課目(TGL))
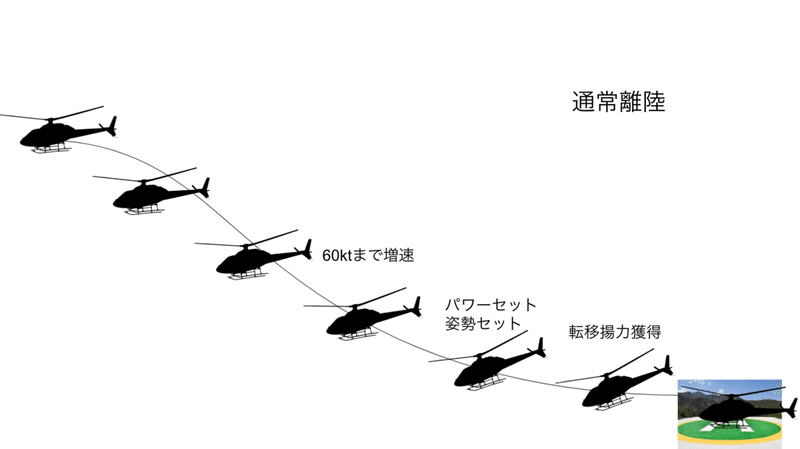
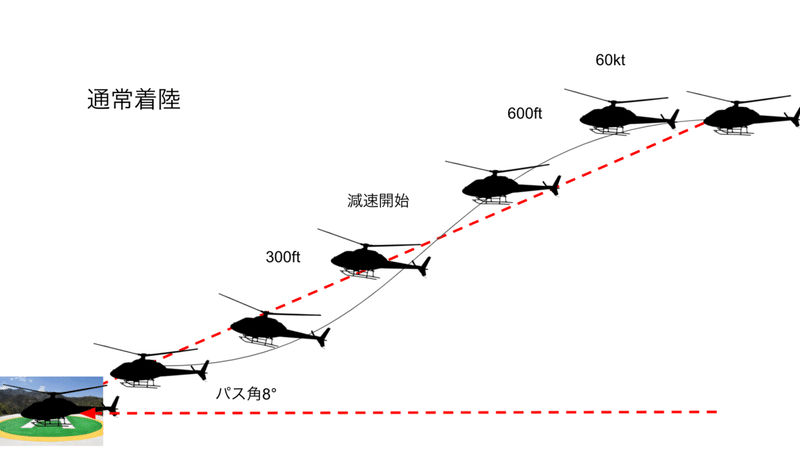
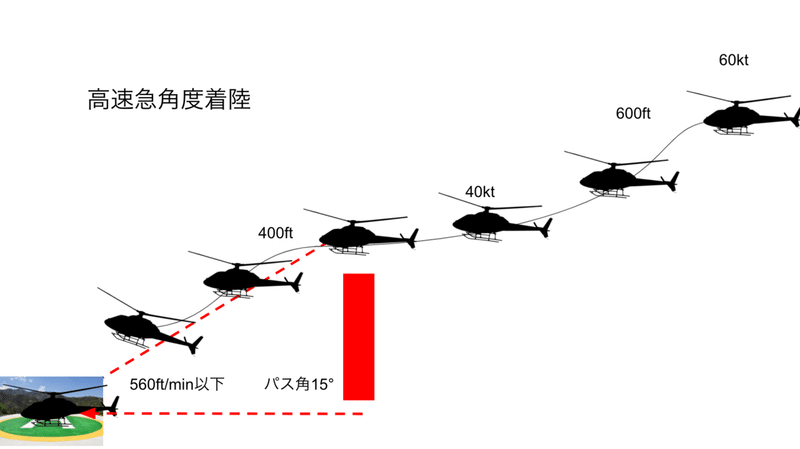
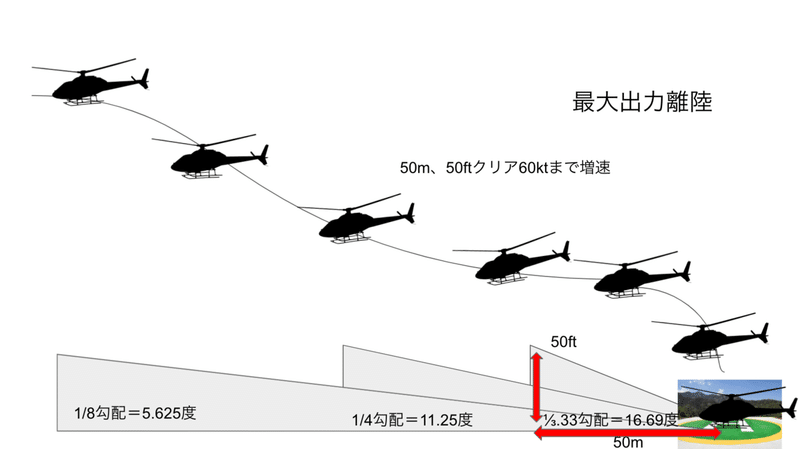
図はイメージ
こうしてみると離着陸だけでも色々なやり方があることと、航空機特性に応じた操縦も心がける必要のあるヘリコプターは、複雑であり奥が深い乗り物であると思います。
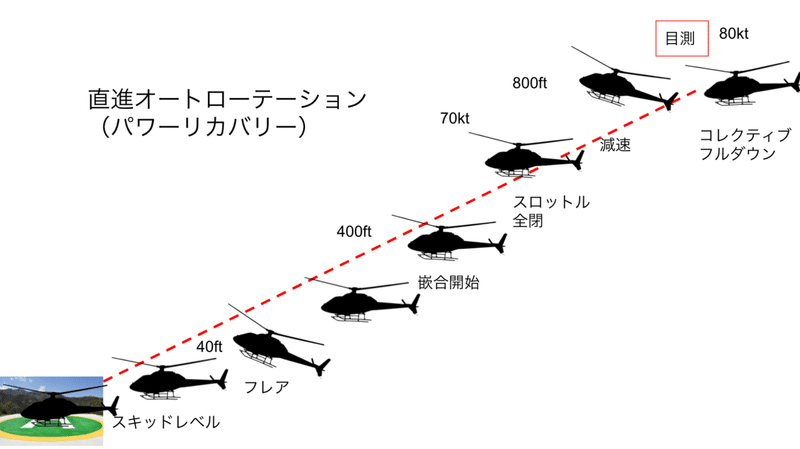
おまけのオートローテーション着陸のイメージ図
オートローテーション…エンジンが止まっても安全に着陸するための操作
詳しくはオートローテーションとは?(Wikipedia)
自分の理解のためにまとめ記事になってしまいましたが、ヘリコプターについてもっと知りたい方がいれば質問してもらえれば答えますのでお気軽にどうぞ。
また気が向いたら記事も書いてみます。
それではまた次回!!
この記事が気に入ったらサポートをしてみませんか?