掃除ロボットver2は掃除がおわらない[掃除ロボット開発中]

楽がしたくて掃除ロボット開発中
掃除をロボットにやらせようと去年から画策していいます。前回はまったく掃除をしてくれない残念なロボットになりました。
掃除ロボットver2
前回の失敗を対策してできたver2を作りました。

タイヤは、ダイソーで買ったペット用のおもちゃを使いました。

掃除ロボットver2の仕組み
掃除ロボットの仕組みを紹介します。掃除ロボットは、"前輪", "後輪", "いろいろ"の3つの構成になっています。

後輪について
後輪は、サーボモータで車輪が左右に傾くようになっています。

後輪は、歯車を使い軸を回すことで車輪を傾けます。
手で軸を回しているところをサーボモーターにします。

前輪
前輪はそのままモーターと車輪を直結しています。

車体と前輪を固定します。この固定軸はモーターの動力を車輪に伝えません。

中央の軸がモーターの動力を車輪に伝えます。

タイヤのホイール部は3DプリンターとBB弾で作りました。こちらで詳細を紹介しています。
いろいろ
ここにはいろいろあります。
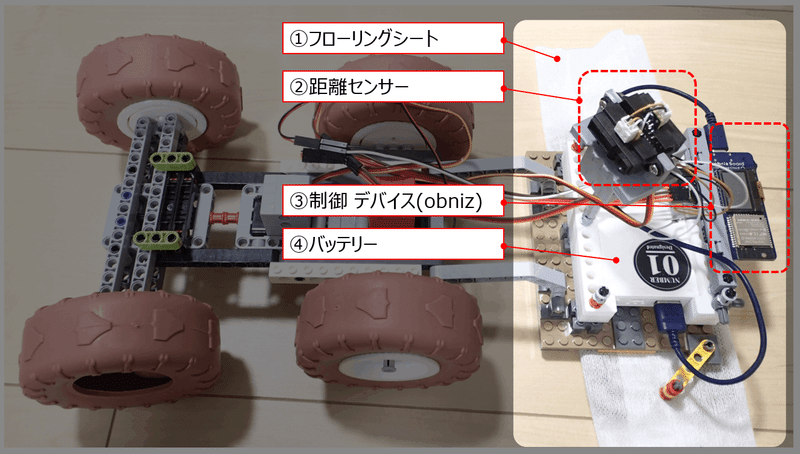
①フローリングシート
床に設置するように底面にフローリングシートを張っています。ここで汚れをふき取ります。100均で買ったいたにフローリングシートを張っています。


②距離センサー
距離センサーはこのようにサーボモーターの上に設置して、サーボモータにより計測する方向を変えられるようにしています。

距離センサー設置の詳細はこちらに記載しました。
③制御デバイス(obniz)
距離センサー、モーター、サーボモーターをobnizで制御します。距離センサーから距離情報を取得するスクリプトについてはこちらに記載しました。
④バッテリー
掃除ロボットの電力源です。バッテリーをフローリングシートの上に置くことでフローリングシートが床に設置する力を増やしています。
駆動テスト
モーター、サーボモーターが期待した通りに動作するかテストします。
いい感じに動作しています。いけそうです。
拭き掃除テスト1回目
いよいよ、拭き掃除テストです。
前進し壁に近づくと止まり周囲を計測する処理を作りました。この動きで拭き掃除ロボットとして期待した動きになるか検証します。
めっちゃ、空回りしてる
空回りしながらもなんとか壁まで進み、周りを計測することができました。プログラムとしては想定した通りに動きましたが、車輪がこんなに空回りしててはいつまでたっても掃除がおわりません。これはいかん。
拭き掃除テスト2回目
車輪が空回りしないよう重りをのせてテストしてみます。
重くて進まない
今度は重くて壁まで進まなくなりました。あぅ~
配線図
備忘録として配線図を残しておきます。


開発は続く
残念ながら今回も掃除してくれないロボットになりました。失敗はしましたが、フローリングシートの摩擦を上回る動力を追加するなど改善点も見えてきているのでver3の開発に取り掛かれそうです。
※追記※ ver2.5の様子です。
余談
ver1はまともにすすみませんでしたが、ver2は一応進むことはできたので少し前進したと思うことにします。まとに進まないver1はこちらで紹介しています。
こんな弱小ブログでもサポートしてくれる人がいることに感謝です。