シャープ測距モジュール GP2Y0A21YK 固定台を3Dプリンターで作った

距離センサーの設置台を制作
距離センサーを購入したので、設置台を3Dプリンターで制作しました。

設置台の3Dモデルを作成
設置台は3Dプリンターで作成するので、3Dモデルを作成します。
3DCGソフトBlenderを使用しました。BlenderにはPythonスクリプトで3Dオブジェクトを作成できるので、スクリプトで3Dオブジェクトを作成しました。ソースをスクリプトにするのでgitで管理できるので私はよく使います。
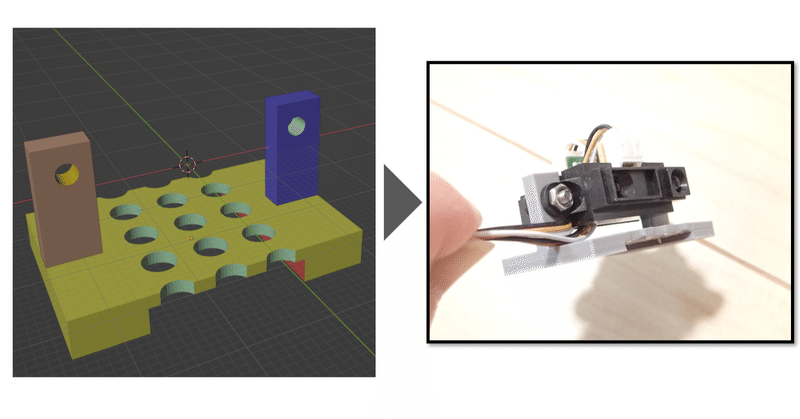
このようにして作成した設置台の3Dオブジェクトがこちらです。
スクリプトはgithubで公開しています。
実際に造形したものがこちらです。
造形物
造形した設置台を写真で紹介します。この設置台はサーボモータの上にのせることを想定しています。

上部には距離センサーを設置します。

このようにサーボモータの上に設置します。

このように設置台の上に距離センサーを2つ背中合わせに設置できます。ネジは M3*12 30pcs というものを使用しています。

サーボモータと距離センサーを設置するとこのようになります。下のサーボモータにより首振りをして回りの距離をはかれるようになります。

使用例
こちらは開発中のラジコンに設置したものです。この距離センサーで壁にぶつからない機能を実装したいと思っています。

ーーー
以上です。
補足:GP2Y0A21YKの制御について
この測距センサでの距離計測に関してはこちらで紹介しています。
拭き掃除するロボットの開発につづく
この設置台は、拭き掃除ロボットの開発のために作成しました。開発中のロボットはこちらです。今回紹介した設置台も使用しています。

次回は、この拭き掃除ロボットについて完成度含めて紹介できればと思います。なお、こちらの拭き掃除ロボットは2作目で、1作目はこちらで紹介しています。
※追記※
紹介した設置台を使用した掃除ロボットver2の紹介記事を公開しました。
こんな弱小ブログでもサポートしてくれる人がいることに感謝です。