
先人たちが描いた操縦するロボットの今。

自動・自律的に動くロボットではなく、人による操縦によって動くロボットに関しては過去noteでも書いたことがあります。
その中で操縦型ロボットは
1)ヒトが直接触れない方が良いモノを扱う作業
2)移動コストが高い作業(宇宙とか)
3)知能化コストが高い作業(手術とか)
のどれかがあるとフィットしやすい、みたいなことを書いていました。
そして、DIGITAL Xで始めたの月一のロボット連載でも9月号で操縦型ロボットについて書きました。
被っているところもありますが、こちらはもう少し歴史的なところも拾っています。今回のNoteはもう少し歴史的なところも参照しながら、代表的な分類とともに写真とか動画とかを見てみたいと思います。
パワーアップ系
アメリカGE(General Electric)のRalph Mosher(ラルフ・モッシャー)氏らが、1960年代に開始したのが「Hardiman(ハーディマン)」という装着型ロボットのプロジェクトです。いわゆるパワーアシストロボットの先駆けというやつでしょうか。25倍くらいの力を想定していたようです。
以下の動画の50秒くらいからボーっとみているだけでも面白いというか昔からやっていることは変わらないなぁという感じです。
そして、GEというのはちゃんとした企業だなぁと思うのは、沢山の技術資料が残っています。スキャンしたものなので読みにくいのですが、構想からデータまで凄いなと思います。【レポート1】【レポート2】【レポート3】
そして、この世界観を実現したのが藤本さん率いるATOUN社のNIOではないでしょうか?
そして、もう一つ最近注目を集めているのが、Sarcos Roboticsのガーディアンシリーズでしょうか?CES2020でのデルタ航空ブースでのデモは大人気でしたし、9月追加で40億円調達したこともニュースになっていました。
こういう重作業系のフルスペックの装着型ロボットがどこまで普及していくのかは、まだまだ未知数なところがありますが、少なくとも腰などのポイントタイプのパワーアシストは上記のATOUN社を始めとして着実と広がっていっていますね。
生体信号系
パワーアップ系の中でも筋肉などの生体信号を活用するものはありますが、ここでは弱くなった、もしくは失われた機能を回復するために残された機能、生体信号を使ってロボットを操縦するということに注目したいと思います。
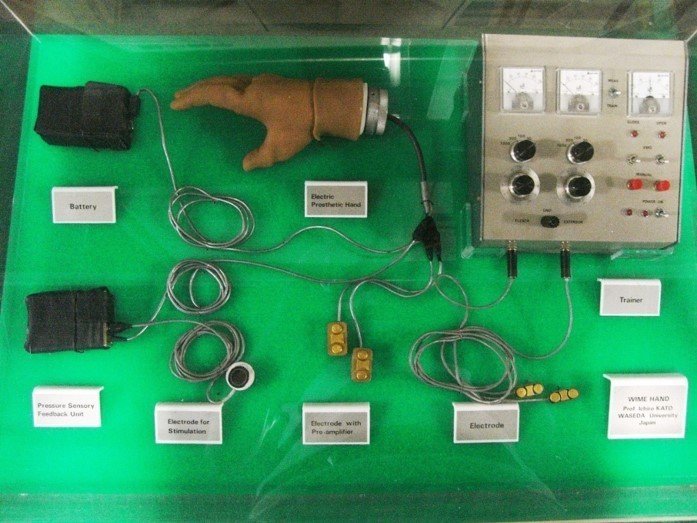
元は義手とか義足に行きつくのではないでしょうか。生体信号の中でも筋肉を動かそうとするときに生じる筋電信号を使った筋電義手です。1964年に早稲田大学の加藤一郎先生らが始めた「前腕切断者用筋電義手(ワセダハンド)」の研究が原点だと勝手に思っています(情報源に偏りがあるかもしれません)。文献などを読むと、加藤先生は、1969年に研究室レベルで筋電信号を使った操作を可能にし、1979年には今仙技術研究所と共同開発した「WIMEハンド」として実用化しています。大学に展示してあった写真は以下です(上:WIMEハンド、下:ワセダハンド)。

その後、筋電信号を使ったものとしては、筑波大学山海先生のHALが最も有名でしょう。片麻痺や難病など多くの事例で効果が出ているようですね。
筋肉以外の信号ですと、2014年のブラジルワールドカップで下半身まひの患者が脳波をもとにロボットを制御し、キックオフしたシーンを記憶されている方もいらっしゃるのではないでしょうか。技術自体は、米国デューク大学のMiguel Nicolelis先生らが開発したもので、数カ月にわたり複数名(確か8名)が相当練習した結果だと聞いたことがあります。
最近では、イーロン・マスク氏率いるNueralinkが脳に直接インタフェースを埋め込み、神経と繋ぐといったことが注目されています。倫理的な問題は付きまとってしまうかもしれませんが、イーロン・マスクの爆発的な推進力があると、いよいよ直接的に脳の神経信号をもとにロボット制御含めて様々な刺激の制御がされるようになってくるかもしれませんね。
テレプレゼンス・テレイグジスタンス系
東大舘暲先生が教授がテレイグジスタンスの概念を紹介したのが1980年頃。遠くにあるモノ・ヒトが近くにあるように感じるというのは、今にも引き継がれる非常に先進的な概念だったと思います。舘先生のページが非常に丁寧にまとまっていますので、興味ある方は是非。
このテレプレゼンスが今アバターロボットという表現で急激に広まっています。
舘先生のTelexistence社はコンビニでの商品補充を遠隔から実施する検証を開始しましたし、宇宙用作業ロボットを開発するGITAI、サイボーグ事業を手掛けるMeltin、警備や家事などを遠隔から行おうとしているミラロボティクスなどが、アバターロボットのための新しいハードウエアを開発しています。動画を見ているだけでも、なんか凄い未来感です。
そして、前回のNoteでも紹介した、人型分身コミュニケーションロボット「OriHime」を開発するオリィ研究所は、在宅での寝たきりになった人が遠隔から飲食店で注文を取る店員として働くといった仕組みを実際に立ち上げています。最近ではモスバーガーでも使用されているとニュースになっていましたね。完全に世の中で使われるフェーズに入っている感じです。
さらに、コロナにより急激に存在感を増しているのが、avatar-in社。小売や病院、介護施設などで実証を繰り返しており、きっと使い勝手とかテクニカルな課題なども沢山出てくるんでしょうが、このペースで現場実証を繰り返すとノウハウが急激に蓄積されていくものと思われます。
ということで、操縦型ロボットの昔と今を纏めてみました。
改めて40年以上前に想い描いた先人たちの構想力に驚くとともに、先人たちの描いた世界は着実に社会に浸透し始めていることがわかりました。工場の中では自動化されたロボットが大量に使われていますが、環境が変わる中で、臨機応変な対応が求められるサービスの現場ではしばらく遠隔型・操縦型のロボットが先行して使われるようになるのだと思います。
個人的には色々あった一週間でしたが、Noteを書くことによって自分自分も頑張らねば、と思った一週間になりました。
では、また来週~
安藤健@takecando
=================================
Twitter(@takecando)では気になったロボットやWell-beingの関連ニュースなどを発信しています。よければ、フォローください。
頂いたサポートは記事作成のために活用させて頂きます。