単振子

1. モデルの定式化
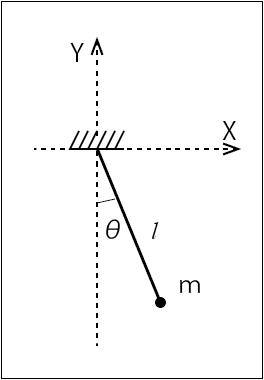
一方の端が固定され, 質量を無視できる長さ $${l}$$の棒の他端に, 質量$${m}$$の質点が拘束されている. 棒が鉛直となす角は$${\theta}$$, 重力加速度は$${g}$$である.
$${\displaystyle T=\frac{1}{2}m(l\dot{\theta})^2}$$, $${U=-mgl\cos\theta}$$より, Lagrangian$${L=T-U}$$は,
$${\displaystyle L=\frac{1}{2}ml^2\dot{\theta}^2 + mgl\cos\theta}$$
Euler-Lagrange eq.は、$${\displaystyle \frac{\mathrm{d}}{dt}\frac{\partial L}{\partial \dot{\theta}}-\frac{\partial L}{\partial \theta}=0}$$により次の通り.
$${\displaystyle \ddot{\theta}=-\frac{g}{l}\sin\theta}$$
2. Pythonで模擬実験
これを次のように1階まで分解し, 連立にして,関数odeを定義する.
$${ \begin{cases}\displaystyle \frac{\mathrm{d}\theta}{dt}&=\dot{\theta}\\\\\displaystyle \frac{\mathrm{d}\dot{\theta}}{dt}&=-\displaystyle \frac{g}{l}\sin\theta\end{cases} }$$
常微分方程式(Ordinary Differential Equation; ODE)の積分は,scipy.integrateのodeintを使う. 関数odeの戻り値は,$${[\theta, \dot{\theta}]}$$である.
Pythonのアニメーションには、FuncAnimationを使う.
import matplotlib.pyplot as plt
import numpy as np
from numpy import sin, cos, pi
from matplotlib.animation import FuncAnimation
from scipy.integrate import odeint
#
# Constants
#
G = 9.8 # [m/s^2] acceleration of gravity
THETA0 = pi/4. # [rad] initial angle
V0 = 1. # [m/s] initial velocity
L = 1. # [m] length of the pendulum
DURATION = 10. # [s] duration time
INTERVAL = 0.05 # [s] interval time
#
# Differential Equation
#
def ode(f, t):
theta, dtheta = f
dfdt = [dtheta, -(G/L) * sin(theta)]
return dfdt
#
# Initial condition
#
f0 = [THETA0, V0/L] # [theta, v] at t = 0
t = np.arange(0, DURATION + INTERVAL, INTERVAL) # domain of definition
#
# Solve the equation
#
sol = odeint(ode, f0, t)
theta = sol[:, 0]
x = L * sin(theta)
y = - L * cos(theta) # coordinates of the mass point
#
# Prepare the Screen to display
#
fig = plt.figure()
ax = fig.add_subplot(111, aspect='equal', autoscale_on=False,
xlim=(-L, L), ylim=(-L, L))
ax.grid()
markers_on = [1]
line, = plt.plot([], [], 'ro-', markevery=markers_on, animated=True)
time_template = 'time = %.1fs'
time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes)
#
# Animate the simulated results
#
def init():
time_text.set_text('')
return line, time_text
def update(i):
next_x = [0, x[i]]
next_y = [0, y[i]]
line.set_data(next_x, next_y)
time_text.set_text(time_template % (i*INTERVAL))
return line, time_text
FRAME_INTERVAL = 1000 * INTERVAL # [msec] interval between frames
ani = FuncAnimation(fig, update, frames=np.arange(0, len(t)),
interval=FRAME_INTERVAL, init_func=init, blit=True)
#
# Show on the screen and Save the results
#
plt.show()
FPS = 1000/FRAME_INTERVAL # frames per second
#ani.save('single_pendulum.mp4', fps=FPS, extra_args=['-vcodec', 'libx264'])
ani.save('single_pendulum.gif', writer='imagemagick', fps=FPS)この記事が気に入ったらサポートをしてみませんか?