
都における自動運転に関する取組をご紹介します!part3

みなさん、こんにちは!スマートシティ推進担当です。
スマートシティ推進担当では、令和4年度、西新宿エリアにおいて、自動運転バスの運行実証プロジェクトを行いました。今回の記事では、本プロジェクトの様子をご紹介します!
自動運転プロジェクトについての過去記事はこちらからご覧いただけます!
【part1】
【part2】
▷プロジェクトの概要
自動運転バスの運行実証は、京王電鉄バス㈱を代表事業者とするコンソーシアム(以下「京王コンソ」という。)が主体となって、令和5年1月23日(月)から2月26日(日)まで約1か月間行いました。
走行ルートは「新宿駅西口~都庁第一本庁舎~都庁第二本庁舎~新宿駅西口」の都庁周辺を循環するルートで、運賃は100円に設定しました。

西新宿エリアでの自動運転バスの運行実証は、令和3年度も実施しています。令和4年度の運行実証は、令和3年度の運行実証で明らかになった課題の解決を図り、同エリアにおける自動運転バスの実装に繋げることを目的として実施しました。
この記事では、主な実証内容や実際にバスに乗車した感想をご紹介します!
運行実証に関するプレスリリースはこちら↓
▷実証内容
① 路上駐車車両の回避:路側センサーの設置
西新宿エリアは路上駐車が多いエリアです。令和3年度の運行実証では、路上駐車車両を避けるために、運転手が手動介入を行う場面が多くありました。そのため、令和4年度は、車両に車線変更機能を新たに装備するとともに、路上駐車が多い箇所の歩道(路側)に路上駐車車両を検知するセンサーを設置しました。


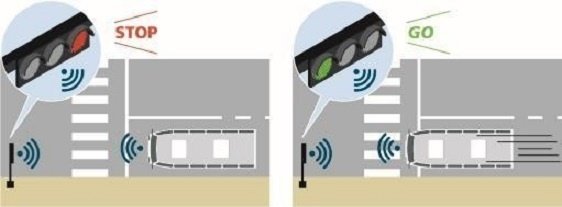
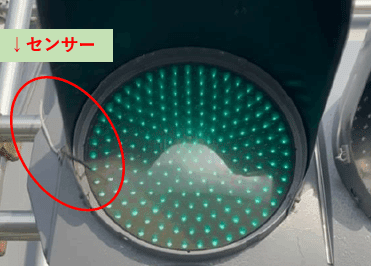
② 信号灯色の認識率の向上:信号協調システムの導入
自動運転車両も、人間の運転手と同じように信号の灯色を認識する必要があります。令和3年度の運行実証では、車両に取り付けたカメラで信号の灯色を識別していましたが、天候により視認性が下がるなどの課題がありました。そのため、令和4年度は、信号機に灯色を認識するセンサーを取り付け、その情報を車両に送信することに挑戦しました。
③ マップ・マッチングの信頼性の向上:LiDAR高認識塗料の塗布
自動運転車両は、現在、自分がどこの位置にいるかを推定しながら走行します。
この自己位置推定技術の1つに、マップ・マッチングと言う技術があります。マップ・マッチングは、LiDARセンサーと呼ばれるレーザー光を利用したセンサーを用いて周囲の情報をリアルタイムに取得し、その情報を内蔵の地図データと比較することにより自己位置を推定する技術です。
令和3年度の運行実証では、走行中にマップ・マッチングが上手くできない場面(マップ・ロスト)が度々ありましたが、令和4年度は、LiDARセンサーによる認識性の高い塗料(LiDAR高認識塗料)を路面に塗布することにより、マップ・ロストの発生回数を減らすことに挑戦しました。


横断歩道から伸びるように塗料が塗られていますが、コンクリートと同色なので目立ちません。

塗料部分がLiDARセンサーにより検出されています。
▷乗車体験
ここからは筆者が自動運転バスに実際に乗車した様子をお届けします。

こちらは、新宿駅西口のロータリーです。乗降ポイントに設置されている「スマートバス停」で、オペレーターから乗車案内を受けることができます。

・スマートバス停とは?
将来の無人自動運転を見据えた、乗客が操作可能な多機能のタッチパネルのことです。スマートバス停では、時刻表や運行経路を閲覧したり、遠隔地にいるオペレーターと会話したりすることができます。また、下部には直近2便のバスの情報が表示されており、乗客が乗車を希望する便のボタンを押すと、自動運転バスに停車の指示を出すことができます。
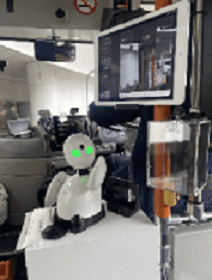
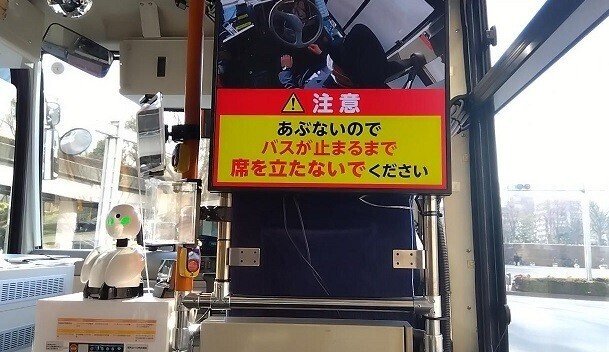
自動運転バスが到着したので乗車します。早速、接客ロボットの「OriHime」が迎えてくれました。
・自動運転バスへの乗車について
今回の運行実証では、運賃の事前決済・乗車認証システムの検証も行いました。乗車を希望する人は、事前に乗車予約サイトで運賃の決済を行い、乗車の際に使用するQRコードを取得します。乗車の際には、OriHimeの上にあるタブレットにこのQRコードをかざします。筆者が乗車した便では、オペレーターが、OriHimeを通して、QRコードが上手く認証できなかった乗客に気がつき、もう1回かざすようにお願いしている場面がありました。

筆者もQRコード認証を済ませ、座席につきます。バス車内にはモニターが設置してあり、ハンドルが自動で動く様子が見られるようになっています。

発車時刻になったのでバスが出発しました。車内では、添乗員の方が自動運転について詳しく説明してくれました。
発車してしばらくすると、新宿中央公園前の交差点に差し掛かりました。この交差点では、路側センサーと信号協調システムが導入されています。

自動運転バスは、運転手の介入なく交差点をスムーズに曲がり切れるのでしょうか…。
バスが左折を開始します。一番左の車線には駐車車両がありました。
歩道に設置したセンサーが駐車車両を認識し、自動運転バスに情報を送信したため、バスは自動でその右隣の車線に入りました。運転手が介入することなく、左折と適切な車線への車線変更ができました!

しばらく走っていると、議事堂通り下の道路に入りました。ここはあたかも地下空間のようになっており、令和3年度の運行実証でマップ・ロストが度々発生した場所です。GPSも届きません。しかし、今回は、LiDAR高認識塗料の効果もあり、バスは自分の位置を見失うことなく自動運転を続けました!

議事堂通り下の道路を抜けた後、バスは新宿駅に向かう道路(中央通り)に入り、新宿駅西口に戻ってきました。約15分の乗車でしたが、走行中、安全に不安を感じたシーンは1度もありませんでした!
▷おわりに
今回の運行実証では、多くの成果を挙げることができました。様々な取組みを行った結果、令和3年度と比べ、運転手による手動介入の回数は大きく減少し、令和3年度は約60%だった自動運転率を約84%まで向上させることができました!
この成果は、自動運転バスの実装に向けて活かされます。この記事をご覧になっている皆さんにも、近い将来、西新宿エリアで自動運転バスを利用していただけるととても嬉しいです!