
EV3 モーター、センサーについて

こんにちは。今回は、EV3に搭載することができるセンサーについて紹介していきます。一部廃盤となったモデルもありますが、紹介してきたいと思います。
モーター
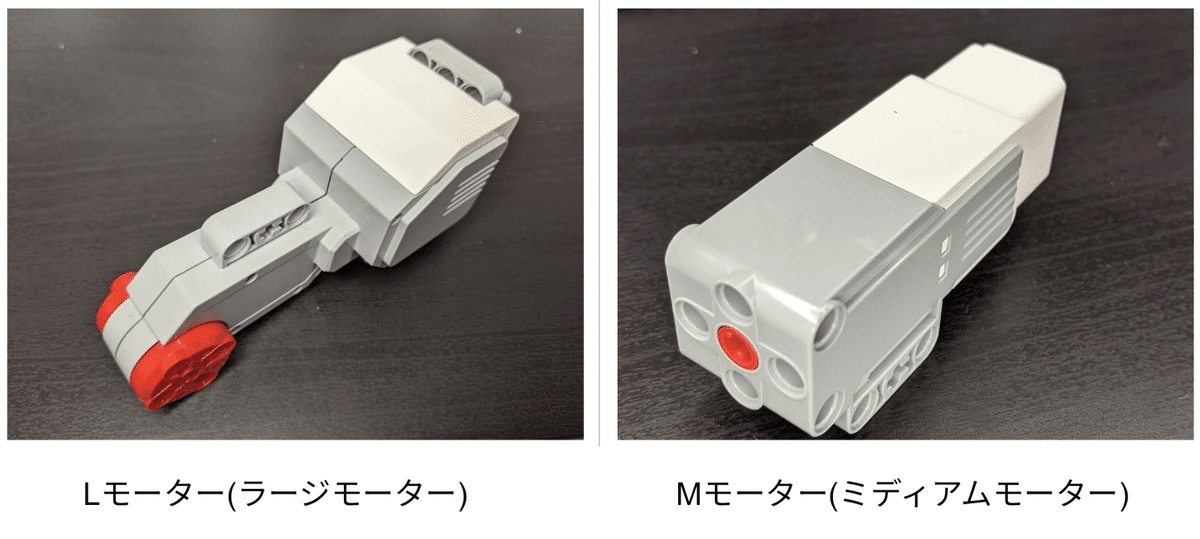
モーターは、L(ラージ)モーター、M(ミディアム)モーターの2つだけです。
2つのモーターには、「回転センサー」が内蔵されており、角度、回転数を調べることができます。
Lモーター、Mモーターともに、それぞれ大きな特徴があります。
・L(ラージ)モーター

ラージと言うことで大きいモーターです。大きなトルクをもち力強く動きます。中の構造は、多くのギアを組み合わせることでモーターのトルクを増加させています。
※トルク表を書き出すこと。あふれるの参考だと記入すること
・M(ミディアム)モーター

ミディアムは英語で中間を意味しています。言葉の通り、Lモーターほどの大トルクを発生させることは、苦手ですが、モーター軸が動かす物体に直結しているため正確な動作を行うことを得意としています。一般的に、アームの開閉や軽い物体を持ち上げるのに使用されています。ただ近年では、回転が正確である利点を活かし、駆動用として利用し制度の高い旋回性能を持ったロボットを作成している方々も多くいます。
※トルク表を書き出すこと。あふれるの参考だと記入すること
センサー
センサーは、回転センサー、カラーセンサー、タッチセンサー、超音波センサー、ジャイロセンサーの5つあります。

※回転センサーは、モーター内蔵ではありますが、重要なセンサーのため紹介させていただきます。
・回転センサー
モーターに内蔵されたセンサーです。タイヤやアームの回転数、角度を指定して動かすことができます。他のセンサーを使用して指定することができます。ロボットが旋回する角度(90度旋回,45度旋回など)を自分で調整する必要はあるが簡単に旋回を行うことができます。また、他のセンサーを使用して判断することが難しいときなどに有効的に使用することができます。
・カラーセンサー

床の色や明るさ、ブロックの色などを検出することができます。モードは、「色」、「反射光の明るさ」、「周辺光の明るさ」の3つを選択することができます。
1番基本的な使用方法としては、ライントレースを行うために下向きにセンサーを向けることで、黒と白の場所を判断しつつ進む技術です。また、ブロック等の色を読み取るために横向き等にセンサーを向けることで、様々な色を判断することができます。
・タッチセンサー

赤い点を押し込むことで唯一物理的に判断することができるセンサーです。「押す」、「離す」、「押して離す」の3つのモードを選択することができます。物理的な判断を行うため、手で押したり、壁に押し付けて使用することができます。
・超音波センサー

超音波を使用して物体との距離を計測することや物体の有無を検出することができます。物体の表面状態や周辺の明るさなどの環境的変化に影響されづらいです。±1cmほどの誤差はあるものの安定して数値を検出することな可能なセンサーです。目のような形をしていることから、至近距離を計測することはこんなんですが、計測できる距離は、約3cm~250cmまで測ることができます。
・ジャイロセンサー

ロボットの傾きや角度、傾く速度(角速度)を測ることができます。1軸のジャイロセンサーで、下記の画像のように計測することができます。取り付ける向きよって様々なデータを取得することができます。倒立ロボットや走行経路の記録プログラムなどを作成するときに使用します。
ただし、正確性は私個人の見解ですがすごく悪く、不具合等もよく発生するためよく注意してご使用ください。笑
まとめ
いかがだったでしょうか。EV3に標準的に搭載されていいるモーター、センサー関係についてでした。簡単に使用することができるものばかりなので、ぜひ様々な機能にまず試していただけたらと思います。
この記事が気に入ったらサポートをしてみませんか?