「2.5時間で分かる!ROS対応ロボットの基礎」セミナーレポート

2023年2月18日、ものづくりもできるコワーキングスペース「TheDECK」様にて自作ロボットとシミュレータを用いたROSセミナーを実施しました。
おかげ様で満席となり15名の方にご参加いただきました。本当にありがとうございました。今回はその様子をレポートします。
たくさんのご参加ありがとうございました‼️🤖
— The DECK(ザ デッキ)- ものづくりFabスペース/コワーキング (@thedeck_jp) February 18, 2023
次回は3/26(日)に応用編を開催します❗️✨
お申し込みはコチラから↓https://t.co/NCk4U6oAIp pic.twitter.com/TqeqYbqNC9
ROSとは
ROSは「Robot Operating System」の略で、ロボットの制御ソフトウェア構築を効率的に行うためのライブラリやツール群が含まれているものです。ロボットの研究・開発において世界中で広く利用されており、ロボットのエンジニア・研究者にとって、ROSを扱うことは重要なスキルとなりつつあります。
セミナーの内容
今回のセミナーではROSの基本をシミュレータで学習し、作成したプログラムを講師がオリジナルで作成した実機ロボットで動作させる、という内容で進めました。セミナーのために作成したロボットは以下のような機体です。
https://t.co/zEVwaOoRzN
— K.Miyawaki (@atan2sin) January 23, 2023
今日は、The DECK様 @thedeck_jp で #セミナー 用ロボットの動作チェックをしました。準備着々と進んでいます。
セミナには #アグリムーバ 製作者様も受講者としてご参加予定です!
興味のある方はぜひよろしくお願いします。#ROS #ロボット #講座 #学び https://t.co/Ax5OnU3xLe pic.twitter.com/VQQYmJgR3s
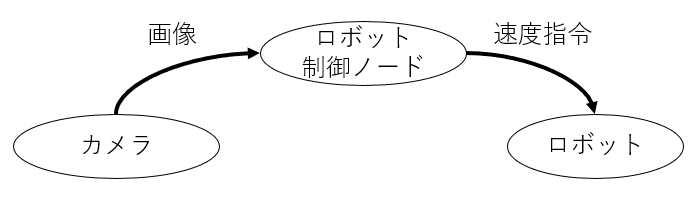
最終的にはロボット搭載のカメラで得られた画像から特定の色を持つ物体領域を抽出し、それをロボットで追跡する、というシステムを目標としました。以下がそのイメージになります。「ノード」とはROSの用語で、実行プログラムとほぼ同じ意味です。
ROSによるロボット制御プログラミング
一般的なROS対応ロボットは、決まった構造の速度の指令を送信されるとそれに沿って動くように製作されています。
セミナーではWindowsPC上にDockerを使って構築したシミュレータを使用し、まずは速度の指令をロボットに送信する方法を説明しました。

簡単な画像処理プログラミング
次に、カメラで撮影された画像から特定の色を持つ領域を抽出する方法を説明しました。セミナーで提供した開発環境内のシミュレータはカメラもシミュレートしていますので、今回の内容であればほとんどシミュレータ上でプログラム開発が可能です。

実機でのプログラム実行
最後にシミュレータ上で作成したプログラムを実機上で動作させました。もちろん、シミュレータと実機では撮影される画像も異なりますので、いくらかパラメータ調整は必要でしたが、作成いただいたプログラムはおおむね期待通り動作し、目の前の黄色いボトルを追跡するようなロボットの制御ができました。以下がそのときの様子です。
プログラミングが終了して動き出しました🤖‼️ pic.twitter.com/yb1uESaUx6
— The DECK(ザ デッキ)- ものづくりFabスペース/コワーキング (@thedeck_jp) February 18, 2023
セミナーを終えて
参加者の皆様からいただいた感想・コメントでは
「実機でシミュレータと同じ動きをさせることができておもしろかった」「ROSの基礎を学べて、物体認識を行い、追従制御ってどんな感じなのかということが体験できて楽しかった」
という非常にありがたいお言葉や
「時間はもっと欲しい」
「資料をもう少し見やすく、かつ、ゆっくり進めてほしい」
という今後のセミナー実施に際して、大変貴重なご指摘をいただきました。
講師としてもやや前半の展開にもたついたところがあり、もっと実機を触っていただきたかったところですが、時間配分やテキストの分量調整が上手くなかったと感じています。
頂戴したコメントを生かし、次回セミナーはより良いものになるようにいたしますので、今後ともどうかよろしくお願いいたします。
2.5時間で「もっと」分かる!ROS対応ロボットの応用
次回は2023年3月26日(日)に同じくThe DECK様にて応用編を開催いたします。
次はLiDAR(レーザ距離センサ)を使って環境のマップを作成し、それに基づいてロボットを目的地まで自律移動させる、という内容でお送りします。
個別セミナーや学術指導・共同研究のご案内
セミナー日程がスケジュールに合わず、参加できなかった場合でも個別にセミナー可能な場合があります。
また、ROS対応ロボットの製作に関する、学術指導や共同研究についてもご相談に応じます。
お気軽に「クリエイターへのお問い合わせ」からご連絡ください。
日々のロボット開発に関する活動の様子はTwitterでお知らせしていますので、是非ご参照ください。TwitterのDMからもコンタクト可能です。
https://twitter.com/atan2sin
この記事が気に入ったらサポートをしてみませんか?