
Unity Robotics Hub 入門 (4) - Pick-and-Place チュートリアル3

以下の記事を参考に、UnityのシミュレータでのPick-and-Placeの実行方法をまとめました。
・Pick-and-Place Tutorial - Part 3: Pick-and-Place In Unity
前回
1. 開発環境の準備
「Unity Robotics Hub 入門 (3) - URDFのインポート」の続きから始めます。

2. TrajectoryPlannerの追加
TrajectoryPlannerの追加手順は、次のとおりです。
(1) Hierarchyウィンドウで「Publisher」を選択し、「Add Component」で「TrajectoryPlanner」を追加。
(2) 「Niryo One」「Target」「TargetPlacement」にHierarchyウィンドウの「niryo_one」「Target」「TargetPlacement」をドラッグ&ドロップ。

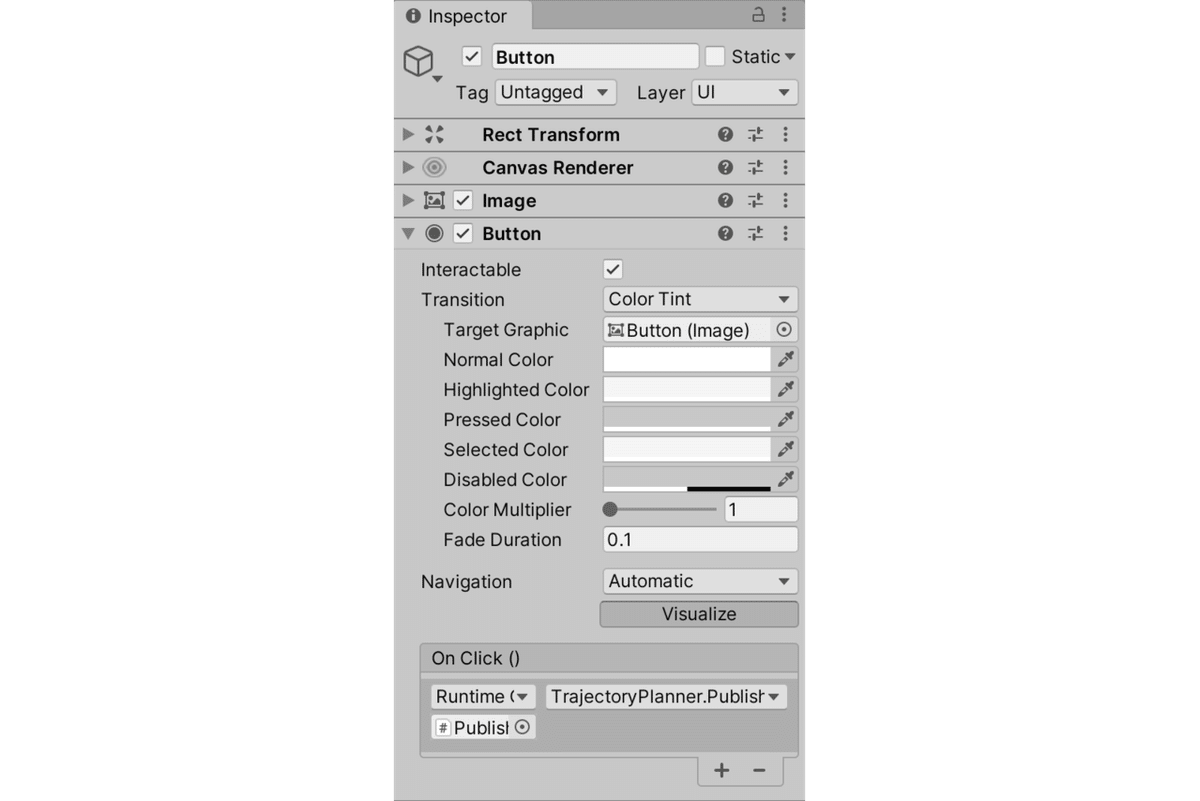
3. パブリッシャーボタンの変更
パブリッシャーボタンの変更手順は、次のとおりです。
(1) Hierarchyウィンドウで「Button」を選択し、Inspectorの「Button → On Click()」を「Publisher」の「TrajectoryPlanner → PublishJoints()」に変更。
4. Pick-and-Placeの実行
Pick-and-Placeの実行手順は、次のとおりです。
(1) ROSワークスペースの準備
「Unity Robotics Hub 入門 (1) - デモの実行」と同様です。
(2) roslaunchでROSサービスを起動。
$ roslaunch niryo_moveit part_3.launchランチャーでは、以下を起動しています。
・エンドポイントノードの起動
・moverノードの起動
・demo.launchの起動
<launch>
<!--エンドポイントノードの起動-->
<rosparam file="$(find niryo_moveit)/config/params.yaml" command="load" />
<node name="server_endpoint" pkg="ros_tcp_endpoint" type="default_server_endpoint.py" args="--wait" output="screen" respawn="true" />
<!--moverノードの起動-->
<node name="mover" pkg="niryo_moveit" type="mover.py" args="--wait" output="screen" />
<!--demo.launchの起動-->
<include file="$(find niryo_moveit)/launch/demo.launch" />
</launch>(3) UnityエディタでPlayボタンを押す。
(4) Publishボタンを押す。
「Niryo One」が動き、「Target」を「TargetPlacement」まで運びます。

5. コードの確認
◎ クライアント (TrajectoryPlanner)
モーションプランニングを実行します。
・Start() : 初期化
・PublishJoints() : サービスへのリクエスト送信 (パブリッシュボタン押下)
・CurrentJointConfig() : 関節角度の取得。
・TrajectoryResponse() : サービスのレスポンス受信時の処理。
・ExecuteTrajectories() : モーションプランニングの実行。
・OpenGripper() : グリッパーを開く。
・CloseGripper() : グリッパーを閉じる。
サービスでは、リクエストに以下の情報を保持しています。
・NiryoMoveitJoints
・Jointの角度 (float[])
・Targetの姿勢 (vector+quaternion)
・TargetPlacementの姿勢 (vector+quaternion)
・geometry_msgs/Pose pick_pose
・geometry_msgs/Pose place_pose
レスポンスに以下の情報を保持しています。
・moveit_msgs/RobotTrajectory[] trajectories
モーションプランは、次の4つです。
・PreGrasp : つかむ前
・Grasp : つかむ
・PickUp :ピック
・Place : プレース
using System;
using System.Collections;
using System.Linq;
using RosMessageTypes.Geometry;
using RosMessageTypes.NiryoMoveit;
using Unity.Robotics.ROSTCPConnector;
using Unity.Robotics.ROSTCPConnector.ROSGeometry;
using UnityEngine;
// モーションプランナー
public class TrajectoryPlanner : MonoBehaviour
{
// 定数
const int k_NumRobotJoints = 6;
const float k_JointAssignmentWait = 0.1f;
const float k_PoseAssignmentWait = 0.5f;
// ROS通信変数
[SerializeField]
string m_RosServiceName = "niryo_moveit";
public string RosServiceName { get => m_RosServiceName; set => m_RosServiceName = value; }
// 参照
[SerializeField]
GameObject m_NiryoOne;
public GameObject NiryoOne { get => m_NiryoOne; set => m_NiryoOne = value; }
[SerializeField]
GameObject m_Target;
public GameObject Target { get => m_Target; set => m_Target = value; }
[SerializeField]
GameObject m_TargetPlacement;
public GameObject TargetPlacement { get => m_TargetPlacement; set => m_TargetPlacement = value; }
// つかむ前に、グリッパーが常にキューブの上に配置されていることを確認
readonly Quaternion m_PickOrientation = Quaternion.Euler(90, 90, 0);
readonly Vector3 m_PickPoseOffset = Vector3.up * 0.1f;
// Joint
ArticulationBody[] m_JointArticulationBodies;
ArticulationBody m_LeftGripper;
ArticulationBody m_RightGripper;
// ROSコネクション
ROSConnection m_Ros;
// スタート
void Start()
{
// ROSコネクションの取得
m_Ros = ROSConnection.GetOrCreateInstance();
// サービスのレスポンスのコールバックの登録
m_Ros.RegisterRosService<MoverServiceRequest, MoverServiceResponse>(m_RosServiceName);
// Jointの取得
m_JointArticulationBodies = new ArticulationBody[k_NumRobotJoints];
var linkName = string.Empty;
for (var i = 0; i < k_NumRobotJoints; i++)
{
linkName += SourceDestinationPublisher.LinkNames[i];
m_JointArticulationBodies[i] = m_NiryoOne.transform.Find(linkName).GetComponent<ArticulationBody>();
}
var rightGripper = linkName + "/tool_link/gripper_base/servo_head/control_rod_right/right_gripper";
var leftGripper = linkName + "/tool_link/gripper_base/servo_head/control_rod_left/left_gripper";
m_RightGripper = m_NiryoOne.transform.Find(rightGripper).GetComponent<ArticulationBody>();
m_LeftGripper = m_NiryoOne.transform.Find(leftGripper).GetComponent<ArticulationBody>();
}
// グリッパーを閉じる
void CloseGripper()
{
var leftDrive = m_LeftGripper.xDrive;
var rightDrive = m_RightGripper.xDrive;
leftDrive.target = -0.01f;
rightDrive.target = 0.01f;
m_LeftGripper.xDrive = leftDrive;
m_RightGripper.xDrive = rightDrive;
}
// グリッパーを開く
void OpenGripper()
{
var leftDrive = m_LeftGripper.xDrive;
var rightDrive = m_RightGripper.xDrive;
leftDrive.target = 0.01f;
rightDrive.target = -0.01f;
m_LeftGripper.xDrive = leftDrive;
m_RightGripper.xDrive = rightDrive;
}
// Jointの角度の取得
NiryoMoveitJointsMsg CurrentJointConfig()
{
var joints = new NiryoMoveitJointsMsg();
for (var i = 0; i < k_NumRobotJoints; i++)
{
joints.joints[i] = m_JointArticulationBodies[i].jointPosition[0];
}
return joints;
}
// サービスへのリクエスト送信 (パブリッシュボタン押下)
public void PublishJoints()
{
// リクエストの生成
var request = new MoverServiceRequest();
// Jointの角度の指定
request.joints_input = CurrentJointConfig();
// Targetの姿勢の指定
request.pick_pose = new PoseMsg
{
position = (m_Target.transform.position + m_PickPoseOffset).To<FLU>(),
orientation = Quaternion.Euler(90, m_Target.transform.eulerAngles.y, 0).To<FLU>()
};
// TargetPlacementの姿勢の指定
request.place_pose = new PoseMsg
{
position = (m_TargetPlacement.transform.position + m_PickPoseOffset).To<FLU>(),
orientation = m_PickOrientation.To<FLU>()
};
// サービスへのリクエスト送信
m_Ros.SendServiceMessage<MoverServiceResponse>(m_RosServiceName, request, TrajectoryResponse);
}
// レスポンス時に呼ばれる
void TrajectoryResponse(MoverServiceResponse response)
{
if (response.trajectories.Length > 0)
{
// モーションプランニングの実行
Debug.Log("Trajectory returned.");
StartCoroutine(ExecuteTrajectories(response));
}
else
{
Debug.LogError("No trajectory returned from MoverService.");
}
}
// モーションプランニングの実行
IEnumerator ExecuteTrajectories(MoverServiceResponse response)
{
if (response.trajectories != null)
{
// モーションプランの実行 (PreGrasp、Grasp、PickUp、Place)
for (var poseIndex = 0; poseIndex < response.trajectories.Length; poseIndex++)
{
// Jointの角度の指定
foreach (var t in response.trajectories[poseIndex].joint_trajectory.points)
{
var jointPositions = t.positions;
var result = jointPositions.Select(r => (float)r * Mathf.Rad2Deg).ToArray();
// Jointの角度の指定
for (var joint = 0; joint < m_JointArticulationBodies.Length; joint++)
{
var joint1XDrive = m_JointArticulationBodies[joint].xDrive;
joint1XDrive.target = result[joint];
m_JointArticulationBodies[joint].xDrive = joint1XDrive;
}
// 0.1秒待機
yield return new WaitForSeconds(k_JointAssignmentWait);
}
// Grasp完了時にグリッパークローズ
if (poseIndex == (int)Poses.Grasp)
{
CloseGripper();
}
// 0.1秒待機
yield return new WaitForSeconds(k_PoseAssignmentWait);
}
// Place完了時にグリッパーオープン
OpenGripper();
}
}
enum Poses
{
PreGrasp,
Grasp,
PickUp,
Place
}
}◎ サーバー (niryo_moveit)
#!/usr/bin/env python
# coding: UTF-8
from __future__ import print_function
import rospy
import sys
import copy
import math
import moveit_commander
import moveit_msgs.msg
from moveit_msgs.msg import Constraints, JointConstraint, PositionConstraint, OrientationConstraint, BoundingVolume
from sensor_msgs.msg import JointState
from moveit_msgs.msg import RobotState
import geometry_msgs.msg
from geometry_msgs.msg import Quaternion, Pose
from std_msgs.msg import String
from moveit_commander.conversions import pose_to_list
from niryo_moveit.srv import MoverService, MoverServiceRequest, MoverServiceResponse
joint_names = ['joint_1', 'joint_2', 'joint_3', 'joint_4', 'joint_5', 'joint_6']
# MelodicとNoeticの間で、plan()の戻り型が変更
if sys.version_info >= (3, 0):
def planCompat(plan):
return plan[1]
else:
def planCompat(plan):
return plan
# ロボットのJointの角度と目標姿勢からモーションプランを作成
def plan_trajectory(move_group, destination_pose, start_joint_angles):
# スタート状態の生成
current_joint_state = JointState()
current_joint_state.name = joint_names
current_joint_state.position = start_joint_angles
moveit_robot_state = RobotState()
moveit_robot_state.joint_state = current_joint_state
# 開始状態の指定
move_group.set_start_state(moveit_robot_state)
# 姿勢目標の指定
move_group.set_pose_target(destination_pose)
# モーションプランニングの実行
plan = move_group.plan()
# モーションプランに失敗
if not plan:
exception_str = """
Trajectory could not be planned for a destination of {} with starting joint angles {}.
Please make sure target and destination are reachable by the robot.
""".format(destination_pose, destination_pose)
raise Exception(exception_str)
return planCompat(plan)
"""
以下の4つの状態を使用して、モーションプランを作成。
1. Pre Grasp - グリッパーをターゲットの真上に移動
2. Grasp - グリッパーをターゲットまで下げる
3. Pick Up - グリッパーを元の高さまで上げる
4. Place - グリッパーをターゲットプレースメントまで移動
グリッパーの動作は、このモーションプランの範囲外で処理される。
- Grasp完了時にグリッパークローズ
- Place完了時にグリッパーオープン
https://github.com/ros-planning/moveit/blob/master/moveit_commander/src/moveit_commander/move_group.py
"""
def plan_pick_and_place(req):
response = MoverServiceResponse()
group_name = "arm"
move_group = moveit_commander.MoveGroupCommander(group_name)
current_robot_joint_configuration = req.joints_input.joints
# Pre grasp - グリッパーをターゲットの真上に移動
pre_grasp_pose = plan_trajectory(move_group, req.pick_pose, current_robot_joint_configuration)
if not pre_grasp_pose.joint_trajectory.points:
return response
previous_ending_joint_angles = pre_grasp_pose.joint_trajectory.points[-1].positions
# Grasp - グリッパーをターゲットまで下げる
pick_pose = copy.deepcopy(req.pick_pose)
pick_pose.position.z -= 0.05
grasp_pose = plan_trajectory(move_group, pick_pose, previous_ending_joint_angles)
if not grasp_pose.joint_trajectory.points:
return response
previous_ending_joint_angles = grasp_pose.joint_trajectory.points[-1].positions
# Pick Up - グリッパーを元の高さまで上げる
pick_up_pose = plan_trajectory(move_group, req.pick_pose, previous_ending_joint_angles)
if not pick_up_pose.joint_trajectory.points:
return response
previous_ending_joint_angles = pick_up_pose.joint_trajectory.points[-1].positions
# Place - グリッパーをターゲットプレースメントまで移動
place_pose = plan_trajectory(move_group, req.place_pose, previous_ending_joint_angles)
if not place_pose.joint_trajectory.points:
return response
# モーションプランがすべて機能した場合は、レスポンスにプランを追加
response.trajectories.append(pre_grasp_pose)
response.trajectories.append(grasp_pose)
response.trajectories.append(pick_up_pose)
response.trajectories.append(place_pose)
# 姿勢目標のクリア
move_group.clear_pose_targets()
return response
# サーバー
def moveit_server():
# moveit_commanderの初期化
moveit_commander.roscpp_initialize(sys.argv)
# ノードの生成
rospy.init_node('niryo_moveit_server')
# サーバーのリクエスト受信時のコールバックの登録
s = rospy.Service('niryo_moveit', MoverService, plan_pick_and_place)
print("Ready to plan")
# ノード終了まで待機
rospy.spin()
# メイン
if __name__ == "__main__":
moveit_server()
次回
この記事が気に入ったらサポートをしてみませんか?