
Unity Robotics Hub 入門 (1) - デモの実行

「Unity Robotics Hub」の「Pick-and-Place Tutorial」のデモの実行手順をまとめました。
1. Unity Robotics Hub
「Unity Robotics Hub」は、Unityでロボットシミュレーションを行うためのリポジトリです。「ROS」ベースのツール群が提供されています。
2. 開発環境の準備
開発環境の準備手順は、次のとおりです。
(1) 「Unity Hub」で「Unity 2020.3.10f1以降」のインストール。
(2) 「Docker」のインストール。
(3) 「Unity Robotics Hub」リポジトリのクローン。
$ git clone --recurse-submodules https://github.com/Unity-Technologies/Unity-Robotics-Hub.git3. ROSサービスの起動
ROSサービスの起動手順は、次のとおりです。
(1) ターミナル(コマンドプロンプト)を開く。
(2) クローンしたフォルダの「Unity-Robotics-Hub/tutorials/pick_and_place」に移動。
$ cd <クローンしたフォルダ>/Unity-Robotics-Hub/tutorials/pick_and_place(3) サブモジュールの更新。
$ git submodule update --init --recursive(4) Dockerイメージのビルド。
「Melodic」ベースのイメージを使用します。必要なパッケージがインストールされ、提供されたROSパッケージとサブモジュールがコンテナにコピーされ、catkinワークスペースがビルドされます。
$ docker build -t unity-robotics:pick-and-place -f docker/Dockerfile .(5) Dockerコンテナの起動。
プロンプト「catkin_ws#」が表示されたら成功です。ROSのワークスペースでのコマンド入力の準備が整いました。
$ docker run -it --rm -p 10000:10000 unity-robotics:pick-and-place /bin/bash(6) ROSサービスの起動。
$ roslaunch niryo_moveit part_3.launch4. Unityプロジェクトの実行
Unityプロジェクトの実行手順は、次のとおりです。
(1) Unityでクローンしたフォルダの「Unity-Robotics-Hub/tutorials/pick_and_place/PickAndPlaceProject」を開く。
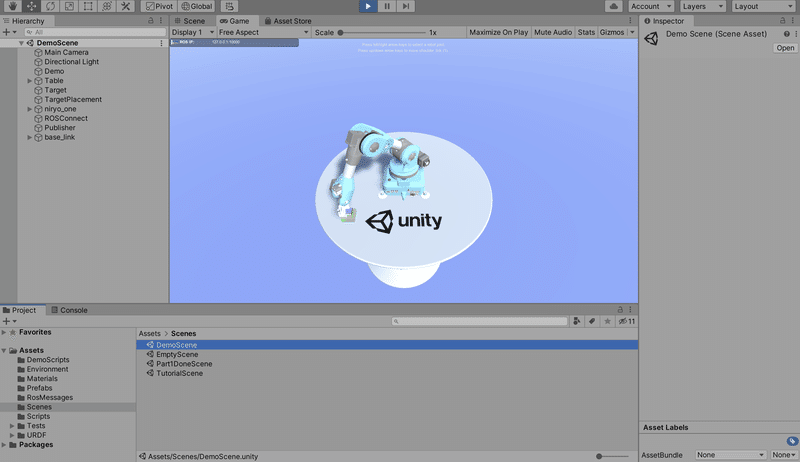
(2) 「Assets/Scenes/DemoScene」を開く。
(3) Playボタンを押す。
「Niryo One」が動き始めるまでに約10秒かかります。立方体を拾って、所定の場所まで運びます。
5. 参考
次回
この記事が気に入ったらサポートをしてみませんか?