プリント基板のテストボード1号ができた

Meridian計画。
電子工作のプロトタイピングでは「ブレッドボード」という、電子パーツや配線を何度でも差し替えられるタイプの基板を使うことが多いです。
回路のテストとしては非常に便利なのですが、動くロボットの動作をテストするのにはあまり向いていません。
というのもケーブルやパーツは挿してあるだけなので抜けやすく、配線もモジャモジャとフクザツになりがちで一旦抜けるとどこに差し直せばよいのかわかりにくくなるためです。なので先に基板に移植しておくことにします。
プリント基板が作りやすい世の中になっていた
ただし今回はこれまでのようなユニバーサル基板への手作業配線ではなく、専門業者に発注して立派なプリント基板を仕上げることにチャレンジしてみたいと思います。
基板発注というと初心者には難易度的なハードルが高いように感じますし、ホビーとしてやるにはちょっと高級すぎると思っていました。
しかしそんなことは全くなく、基板は小型のものであればなんと500円程度で製作することができ、送料も2000円程度で済みます。しかも発注から一週間もかからずに届くというのですから驚きです。昭和でいえば写真の現像プリントみたいなお手軽さとスピード感です。
さらに基板作図ソフトもKiCADという超高性能なソフトがオープンソースになっており無料で使うことができます。
自分が電子工作を始めた頃には考えもしなかったような世の中になっています。2021年に生活していてこれを使わない手はありません。
KiCADをはじめるなら今!
KiCADの解説動画はいくつかありますが、以下の動画が非常によくまとまっており超おすすめです。動画で触れられているアプリのUIは最新版ですし、ほとんどストレスを感じずに発注までを行うことができました。
この動画シリーズでは基本から設計〜発注までが網羅されており、実際自分も作図から発注して受け取るところまで非常にスムーズにできました。
今後ソフトのバージョンアップなどで使い方が変わってくる箇所もあるかもしれないので、KiCADはこれから、という方は動画が現行の最新バージョンに完全対応している今のうちに一度試されると良いと思います。はじめるなら今です。
とりあえずブレッドボードを移植してみる
まずはKiCADの使い方とプリント基板発注の練習ということで、ブレッドボードの状態をそのままKiCADに書き写すところをやってみます。

こんな感じでパーツの回路図記号を並べて接点同士を配線していきます。
KiCADに登録されていない電子パーツもありますが、パーツの登録方法も前述の動画でちゃんと紹介されているので、行き詰まることはほとんどありません。
このステップでは、配線の接続箇所さえ間違っていなければレイアウトなどは適当でも大丈夫です。

次にフットプリントという電子パーツの実寸図を並べていきます。ここで最終的な基板上のレイアウトを決めていきます。
回路の形状についてはアプリ側である程度の自動最適化をしてくれるので、あとは微調整をして精度を上げていけば設計完了です。
ロボットに搭載するにはまだ基板サイズが大きすぎますが、省スペース化はこのテストボードがちゃんと動くことを確認してからで良いでしょう。

次はウェブサイト経由での基板の発注となります。
いくつか細かい入力項目がありますが、発注方法についても動画で丁寧に紹介されているので安心です。
今回は動画に紹介されているPCBgogoを利用しましたが、他にも優良な業者がいくつかあるようです。
作図開始から7日で基板が届いた!
作図に着手してから2日目には発注することができ、7日目には本当に現物が手元に届いていました。便利すぎます。

発注してから届くまでの間にKiCAD上での回路のミスなどにも気づきましたが、致命的なものではなかったのでパターンカットや半田付けで対応できました。
※自分向けメモ:この時に修正した箇所をちゃんとメモしておくことが大事ですよ。めんどうがらずに。
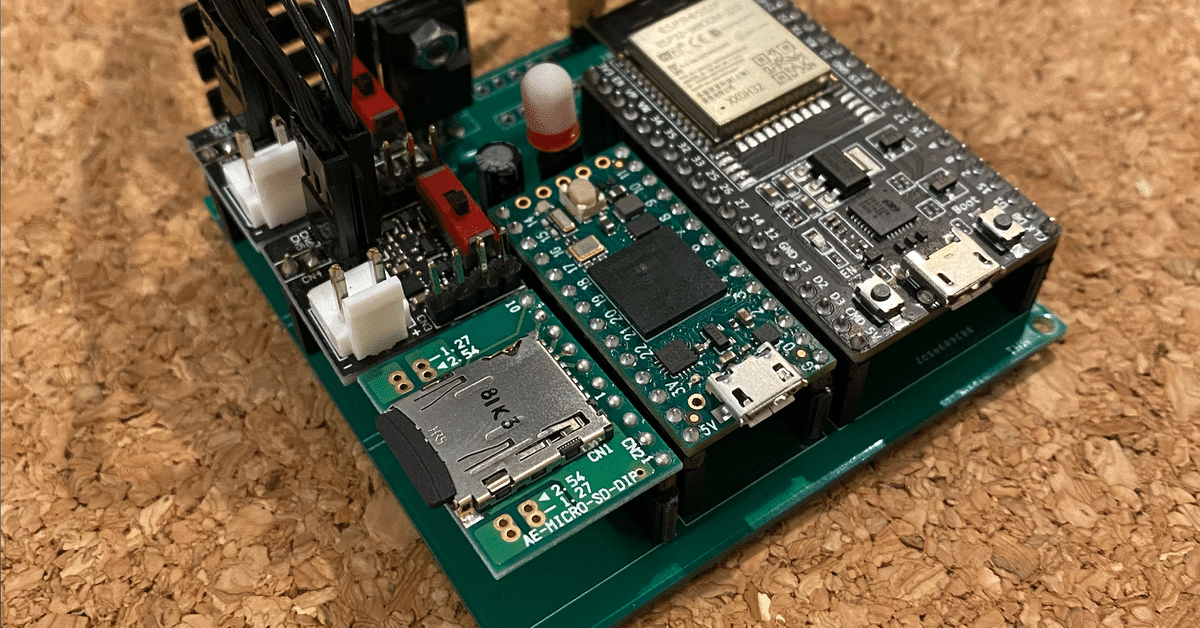
さっそくMeridianのテストボード1号機を起動してみます。
手作業で配線するときもそうですが、この瞬間はかなり緊張します。
電源などの配線がミスっていたらマイコンがおじゃんですし、最悪火をふきます。
ということでスイッチオン!

…という乱暴なことはしておらず、実際には一つパーツを追加しては電圧を確認するという方式で、慎重に慎重に起動しています。
結果、無事に動作することがが確認できました。
動作は良好で、92バイトの状態データがデバイス間を高速で巡っています。
ブレッドボードで動いたものをプリント基板に移植しただけなので動くのは当たり前のようにも思えますが、本当にその当たり前の通りに動くのかの確認はけっこう大事です。
慣れない未知の作業の場合、次のステップに進む時の変更点は1箇所のみする
ということを、ハードにおいてもソフトにおいても守るようにしています。
たとえばブレッドボードからプリント基板というのは今の自分にとってはそれだけで大きな変更ですので、他の変更点は加えないようにします。もし変更点を加えてしまえばそれだけ変数が増え、不具合があった場合の原因究明の難易度がグンと上がってしまい、確認作業で時間の大幅にロスすることになるからです。
作業を進めるとつい合理的なものに変更したいという気持ちが芽生えてしまいますが、そこをなんとか抑えます。
つぎは何をする?
基板ができてロボットを動かしやすくなったので、適当に作ってきたソフト側の基本挙動を調整していきます。
まずは動けばヨシと勢いで作ったソフトなので、今のところコードがめちゃめちゃです。
ボードの小型化についても進めていこうと思います。
謝辞
KiCAD導入にあたり、オンラインロボット練習会にてみなさんにいろいろな選択肢をアドバイスいただきました。おかげさまで基板制作におそらく最短で到達することができました。
次の記事:
前の記事:
目次:
この記事が気に入ったらサポートをしてみませんか?