
体の部位の共用的な呼び方をきめておく

Meridian計画。
これまで座標系の扱いやサーボモーターの共通項について見てきましたが、体の部位の呼び方についてもなるべく共通的なものを決めておこうと思います。
Meridianに準拠したロボットは物理学の世界から現実世界、そしてまた仮想空間へと自由に行き来できることが楽しく学ぶ上でも望ましいので、多くの分野にまたがった共通項を探していきたいと思います。
自然科学、ロボット工学、モデリング用CG、アニメーション用CGなどでの一般的な呼称や概念と互換性を持たせつつ、ホビーロボットの制作や制御にも都合の良いように部位の命名を規則づけていきたいと思います。
基本は人体や動物がお手本
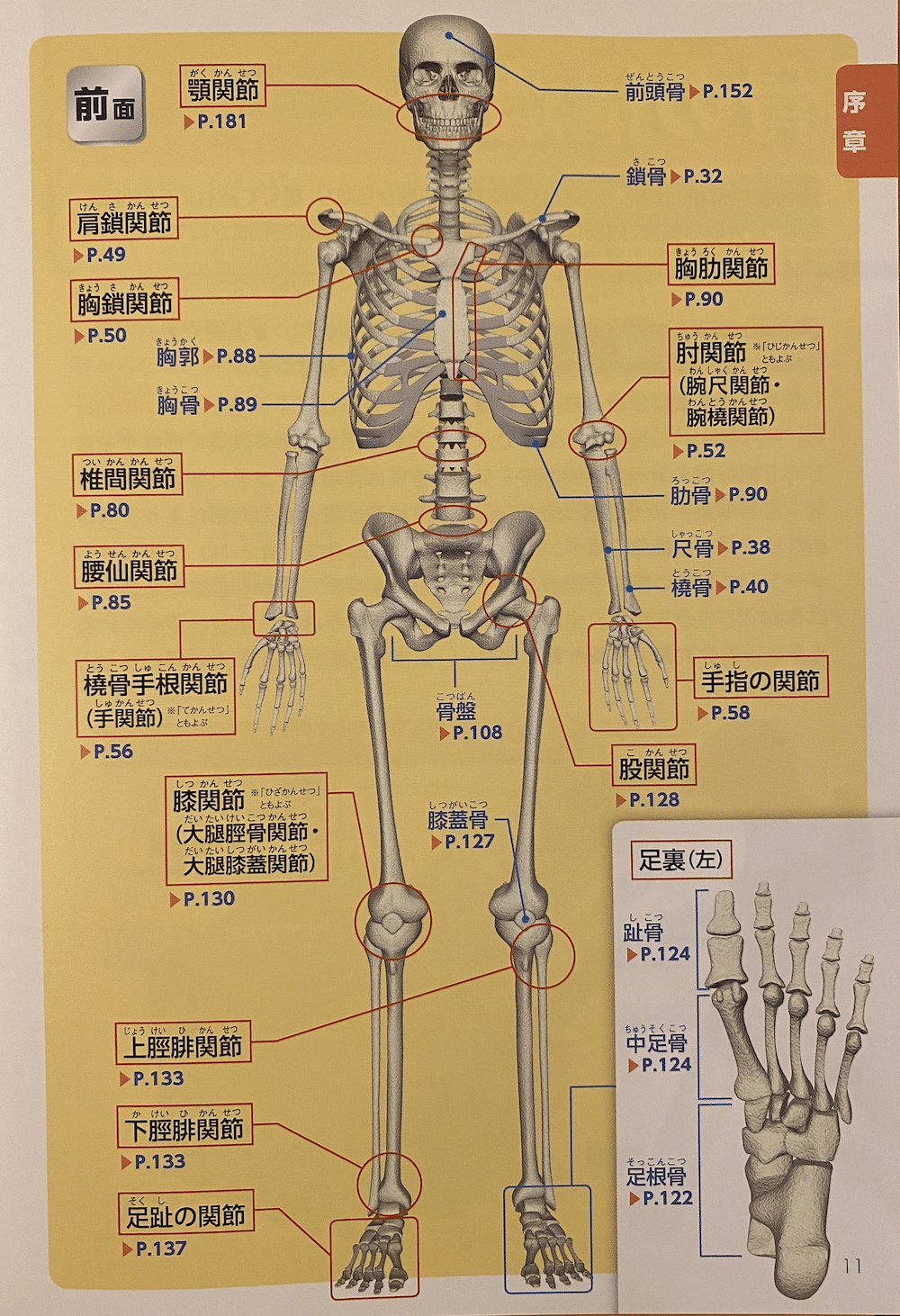
基本はやはり実際の人体や動物をベースとします。ロボットの都合上、筋肉よりも骨や関節を構造の参考にするのがよさそうです。
人体と見比べると、ホビーロボットでは背骨や肩、胸の関節などを省略しやすいです。とくに表現力を持たせるために重要な部位が、競技用のホビーロボットでは省略されがちなのですが、その話については少し長くなるのまた別の記事にて触れたいと思います。
人体と動物は骨の一つ一つを比較するとほぼ対応関係にあるとのことで、人体を参考にしておけばその応用範囲も広がりそうです。
とはいえ、医学的な呼称に合わせると細かくなりすぎますので、大まかな呼称としては参考程度に、ロボットを作る上でより細部を詰めていく際には、また別の視点で観察していければと思います。
ヒューマノイドロボットの例
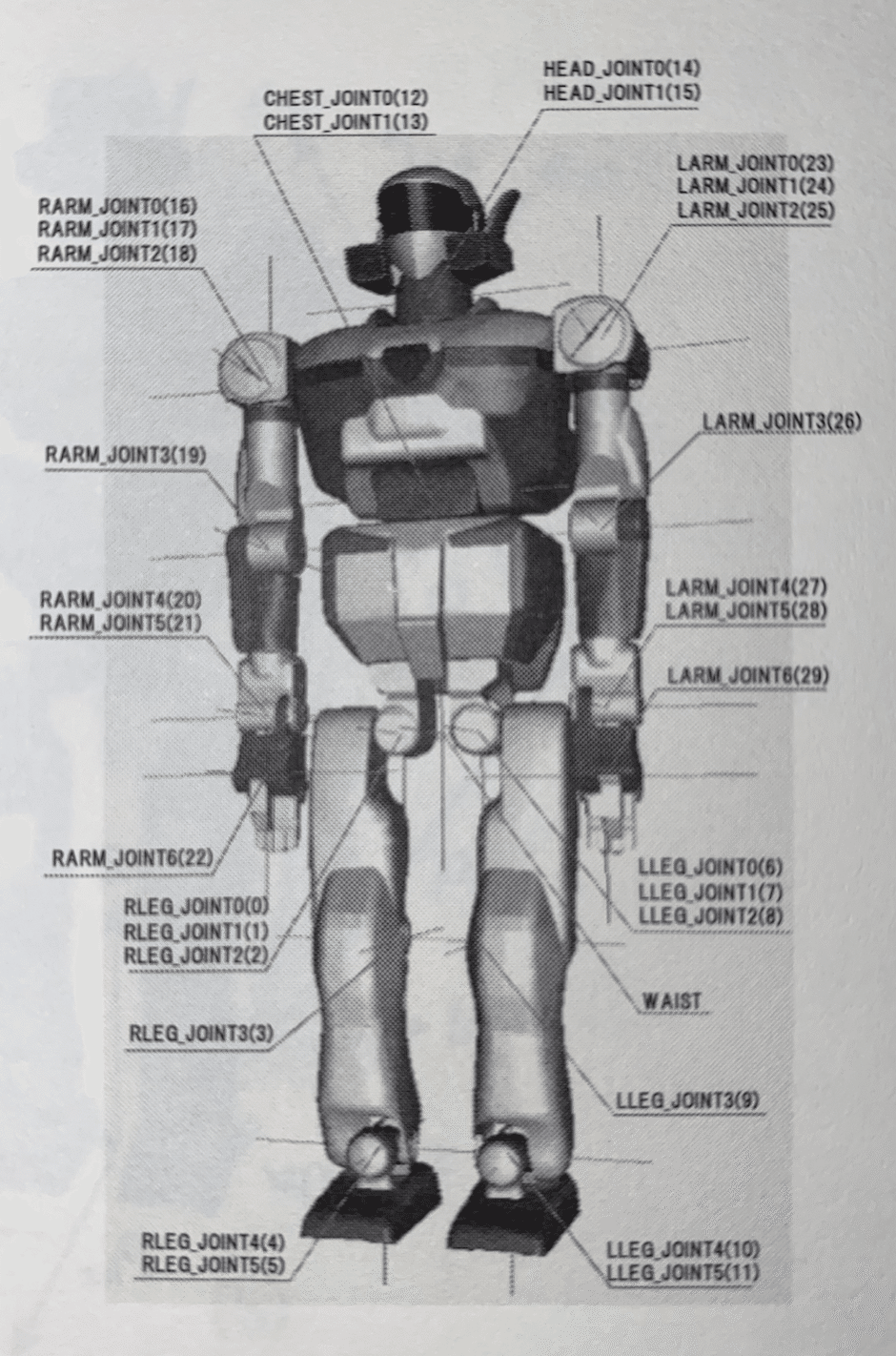
部位の説明が詳細になされた資料があまり手元にないのですが、上記はHRP2の関節の命名例です。分類はかなりざっくりしており、HEAD、CHEST、WAIST、左右ARM、左右LEGの7分類で、それぞれに番号が振られています。

また、ロボットの構成を示す表記法としてURDF (Unified Robotics Description Format)という書式があります。これは学術や産業用ロボットにも使われるそうで、XML形式のフォーマットで表記します。
Unifiedというぐらいですから、なるべく従った方が良さそうです。
URDFは基本的には、基部からLINKとJOINTのペアを連ねて組み、記していくことがその要であり、各部位の命名についての厳密なルールはおそらくありません。
上の図はNAOの構成図ですが、命名規則について参考になります。他との差分として、動体をまとめてtorso、手のことをwristとgripperと言っている点が挙げられます。gripperは機能がイメージしやすいですね。footに該当する箇所はankleとsoleで構成されていますが、ロボットを作る身からすると、その分類にしたくなる気持ちがすごくわかります。
モデリング・アニメーション用GCソフト

こちらは近年メジャーになってきているCGソフトのBlenderです。
画面に出ているのは標準のヒューマノイドアーマチュアーです。
URDFと同じように基部からボーンという関節と骨のセットを伸ばして連ねていく方式です。背骨spineが複数あるのが特徴的です。
二の腕をupper_armと呼ぶのはほぼ共通しているので問題ないのですが、前腕部の呼び方はわかれます。Blenderではforearmと言っています。
また太腿と脛はthaigh、shinとなっています。
ゲーム用CGソフト(Unity)

上図はUnity上の.fbx形式のフィギュアの構成です。
こちらの図では太ももをUpLeg、脛をLegと読んでいます。また上腕はArm、前腕がForeArmとなっています。すこし判別性が弱いかも。

こちらも同じUnityですが、fbx形式のフィギアをインポートしようとした時のアサイン画面になります。
腕がUpperArm、LowerArm、足はUpperLeg、LowerLegとかなりわかりやすく分類されています。基部からの順番も近い方がUpper、遠い方がLowerと法則性がはっきりしていますし、ロボットの表現にはとても向いているような気がします。
もう一つの論点としてロボットの中心部、基部をどこに設定するかという課題があります。
上記のUnityではHipを基部としています。
東洋医学で語られるいわゆる丹田(額の上丹田、胸の中丹田、臍下の下丹田のうちの下丹田)の位置はほぼ股関節の高さにありますので、やはりHipを基部とするのが自然のような気がします。
多くの人が納得できそうな感じに部位名をプロット
他にもいくつかのものを調べ、またtwitter上でも周囲に意見を聞いてみました。
これまで見てきたものの多数決、そしてロボットに使う時の扱いやすさを考慮し、下記のように呼称をプロットしてみました。

以前Twitterでヒアリングして書いたものと同じものですが、だいたいこうかなと思います。肩の分割がこの時点でも少なすぎるような気もしますし、breastは果たしてbreastという呼び名でよいのか、またberryなんて部位が必要なのか、handはそこにfingerが繋がるということでよいのか、など細かいところも実際にロボットを作り始めると出てくると思いますが、そこは議題があがったときにまた考えていけばよいかなと思っています。
実制作のコーディングのところでちょっと苦労をしていましたので、気分転換にこんな記事を書いてみました。
次回こそ進捗を紹介できればと思います。
次の記事:
前の記事:
目次:
この記事が気に入ったらサポートをしてみませんか?