
私の”フォトグラメトリワークフロー” -ドローン撮影の場合 その1-

私がフォトグラメトリ(以下、フォトグラと略す)で3Dモデルを作っていくときのワークフローを紹介します。今のところ、まだ右往左往することが多くてワークフローが定まっているとは言い難いのですが、とりあえず現時点版を紹介します。
私がフォトグラをする場合はロッドや手持ちで対象物を撮影する場合とドローンを使ってある程度広範囲を撮影する場合があります。このシリーズではドローンを使って撮影した写真から3Dモデルを作成し、Sketchfabへアップするまでの工程を紹介したいと思います。
第一回目はミッションプランの作成です。
私がこれまで、と言っても数回程度ですが、撮影に使ったドローンはDJIのDJI AIR 2S(以下、AIR2Sと略す)です。ミッションプランの作成順番としては、始めに、撮影対象の規模と周辺状況の確認、大まかな飛行ルートの想定、撮影時間間隔や飛行スピードの計算、飛行ルートの決定とカメラアングルの決定、という流れにしています。
ドローンを使った撮影の対象としては今のところ古墳しか事例がありませんので、ここでは古墳を撮影することを前提に記述します。
以降では工程の1つ1つを紹介していきます。

1.撮影対象の規模と周辺状況の確認
この工程では、大抵は「なんか撮影に向いてる古墳はないかなぁ」と思いながら対象探しの作業の中で規模と周辺状況の確認も行っています。具体的にはGoogle Mapや地理院地図を使って探しています。古墳の所在地は関東地方であればこの論文を作成するときに大まかには把握していました。古墳がある程度集中している地域を地図を見ながらしらみつぶしに見ていきます(私は地図好きでもあるので、ただ地図を眺めるだけでも楽しいのです)。
まず、GoogleMapで古墳が集中してそうな地域をウロウロして撮影に適した墳丘を探します。「撮影に適した」というのは、ある程度整備されていること、駐車スペースがあること、機材を拡げるスペースがあること、あたりでしょうか。そして周辺環境の確認として、周辺の住宅の密集具合、近隣の大きなビル、道路、河川、線路、鉄塔の有無を調べます。また、できるだけ電柱・電線の状況も確認します。この段階で飛行の障害になりそうなものがあれば、その古墳は潔く諦めます。また、地理院地図を使って航空法が定めるところの住宅密集地域(DID)の確認もします。撮影対象がDID内にある、もしくはそれに隣接していれば航空法に基づく飛行許可申請を行うことになります。


2.ドローンの飛行可否の確認
そして、古墳の所在地の地権者と古墳の所有者が誰であるかも調べます。古墳敷地内への立ち入りと敷地内でのドローンの飛行可否について問い合わせるためです。古墳の場合は大抵は所在地の自治体(県や市)のホームページから教育委員会文化財保護課のような部署に問い合わせれば地権者・所有者が分かります。地権者・所有者が個人であればその時点でその古墳は諦めます。地権者・所有者が自治体であれば、大抵は文化財保護課が所掌なので、そのまま飛行の可否について問い合わせます。今のところいくつかの自治体に問い合わせた反応は「古墳は公園としても使われていて人が来るので飛行はNG」「飛行については特に許可などは必要ない。ただし、文化財の使用許可申請は必要」「特になにもない。飛行前にひとこと連絡してもらえると嬉しい」という3通りの反応がありました。それぞれ自治体によって対応が違うようです。もちろん飛行NGと言われた古墳はこの時点でやはり潔く諦めます。
次は、対象とする古墳に敷地内でドローンの飛行がOKで、関係する機関・人から撮影許可がもらえたという前提で紹介します。
3.ミッションプランの作成
プラン作成で決定する要素は、飛行ルート、飛行高度、飛行速度、撮影間隔、カメラ角度です。そして、これらを求めるために知っておくものがカメラの焦点距離、ピクセルサイズ、画素数です。私が使っているAIR2Sの値は次のとおりです。
- 焦点距離:8.1mm
- ピクセルサイズ:2.4μm
- 画素数:5472x3648
そして、フォトグラで作成するモデルをどれくらいの詳細さ(メッシュ解像度)で作るか、ということを考えると、私の場合「まぁ、写真の1ピクセルが地表面の1cmになれば良いかな」という考えであたりを付けます。そして、航空測量の知識(測量士補の資格を持っています)を使ってその条件に適う飛行高度を求めます。また私の場合、ドローンで撮影する写真のオーバーラップ率は80%になるようにしています(もっと小さな値でも良いのかもしれませんが航空測量は80%が規定値らしく、私は何も考えずこの値に従っています)。そのためにはドローンの飛行速度っと写真の撮影間隔(時間または距離)を求める必要があります。ここでも航空測量の知識を使って求めるのですが私は下の画像のような計算表をエクセルで作って求めるようにしています。このエクセル表は、前述のAIR2Sの諸元やオーバーラップ率を定義しておき、入力した飛行高度に対して撮影間隔を変えると自動的に飛行速度を計算、または、飛行速度を入力すると撮影間隔を自動計算するように作っています。

ここまで求めたら次は飛行ルートを決定します。
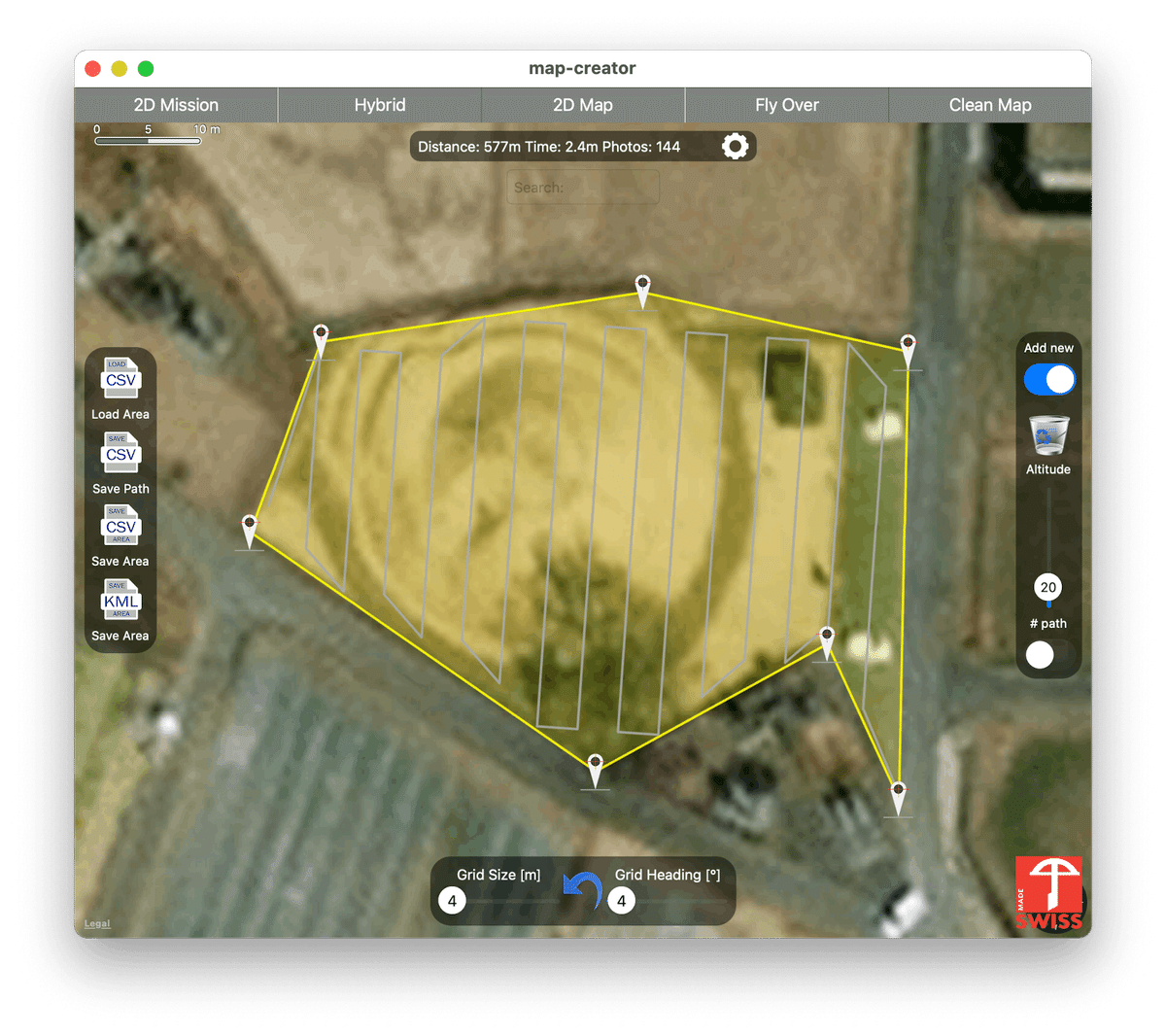
飛行ルートの作成では始めにmap-creatorというアプリを使います。私はiMacで使っていますがiPhone版やiPad版もあります。Androidはなさそうです。
このアプリでは飛行範囲を大まかに指定すれば勝手に飛行ルートを作ってくれます。画面上のGrid SizeとAltitudeを上記で求めた撮影間隔(距離)と飛行高度に設定すれば適切なジグザグの飛行ルートを作ってくれます。ここまでできれば、まずは画面上のSave PathでルートをCVSファイルに出力しておきます。次は、このCSVファイルをLitchi Hubに読み込んで詳細な設定をするわけですが、その前にCSVファイルを直接いじっておきます。いじる箇所は、"gimbalpitchangle"の項目です。ここはジンバル(カメラ)の俯角を指定する項目ですが、私の場合フライト中に俯角を変えることはないのでCSVファイル中では一律の値にしておきます。
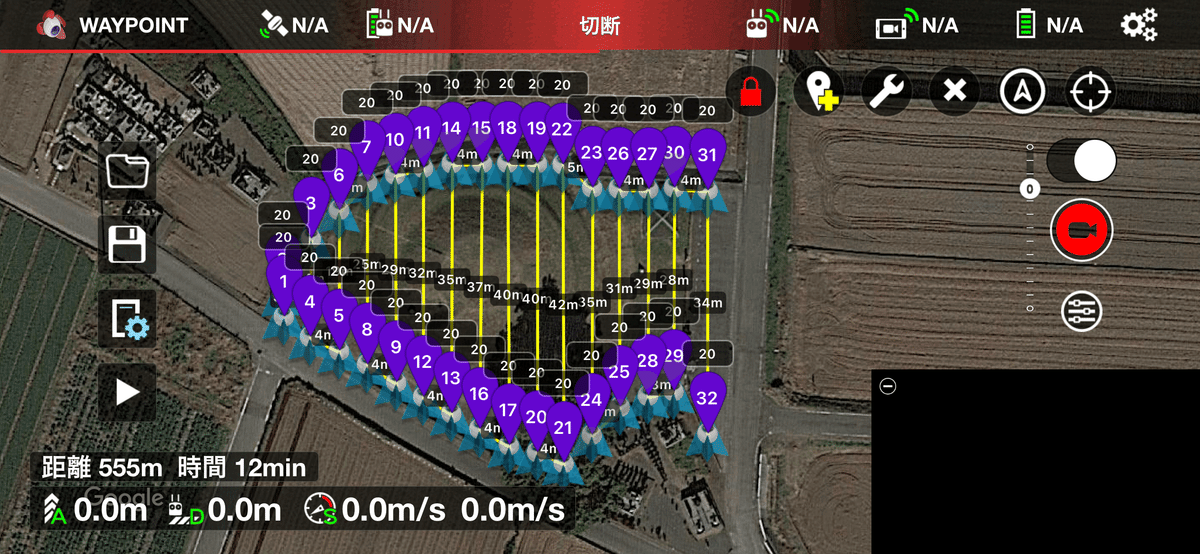
map-creatorで出力したCSVファイルをLitchi Hubで読み込むと下の画像のような表示になります。まず、画面左下の”Setting”でドローンの全体的な動作を規定しておきます。"Cruising Speed"(飛行速度)や"Photo Capture Interval"(撮影間隔)はウェイポイントごとにも設定できますが、私の場合は飛行速度や撮影間隔を飛行中に変えることはないので、ここで一括して規定しておきます。


数字付き紫色マークがウェイポイントを示します。このウェイポイントを選択すると更に下の画像のようなウィンドウが開いてウェイポイント1つ1つに対するドローンの動作を規定することができます。私の場合は前述までの手順で一括設定することが多いのですが、

例えば、下の様な飛行経路を作って撮影対象の周囲を撮ることがあります。このような場合はウェイポイント1つ1つにおける"Heading"(機首方向)を設定することがあります。下の画像の場合だと機体は常に飛行経路の外側を向くように設定しています(よく見ると飛行機のアイコンが外側を向いています)。Lithi Hubでフライトプランの作成ができたら保存します。

実際にドローンを飛ばすときはAndroid端末のLitchi for DJI Droneを使っています(iPhone版を使いたいのですが、現時点ではバグがあるので使っていません
)。このアプリから作成したフライトプランを呼び出すと下の様な画面になります。これでフライトプランの作成は完了です。
ただ、実はLitchi for DJI Droneだけでもフライトプランの作成はできます。でも、携帯電話の小さな画面でいろんな設定を細かくやっていくのは面倒なので、私は上述のようなiMacを使うフローにしています。Litchi for DJI Droneだけで設定する方法またはLitchi for DJI Droneの使用法のについてはこちらに詳しく載っています。
以上が「第一回 ミッションプランの作成」でした。
たぶん、このフロー、そして今後のフローも同じく、「これが正解」ではないはずです。自分自身も試行錯誤しているところなので、今後、課題が見つかって改善するかもしれないし。「まぁ、今のところはこれです」という紹介でした。
次回はいきなりフォトグラメトリ処理に入ります。