
讃えてロボをつくってみよう!(工作編)

音に反応して目を開けてくれるロボットをつくってみましょう!
ここでは、工作(ハードウェア)のつくり方を紹介します。
プログラミング編はこちら。
購読者の方には、ページのさいごで図面を配付中!
・すぐに作れる! 寸法付き図面
・便利! ロボの表情デザインシート
工作レベル:★★★
プログラミングレベル:★☆☆
制作時間:4、5時間
使うもの
・ユカイな生きものロボットキット
・ココロキット
・段ボール、コピー紙
・わり箸
・ひも
・5円玉(6枚くらい)
・カッター
・グルーガン、テープ
・色鉛筆やクレヨン



全体図

仕組みはとっても単純です!ひもでまぶたを引っ張ってるだけ!
必要部品はこちら。👀

部品の準備
【1】必要部品の切り出し
段ボールや わり箸から必要な部品を切り出します。✂️
ちょっと多いですが頑張りましょう!
(可動部がちゃんと動くよう、寸法に注意してください。)
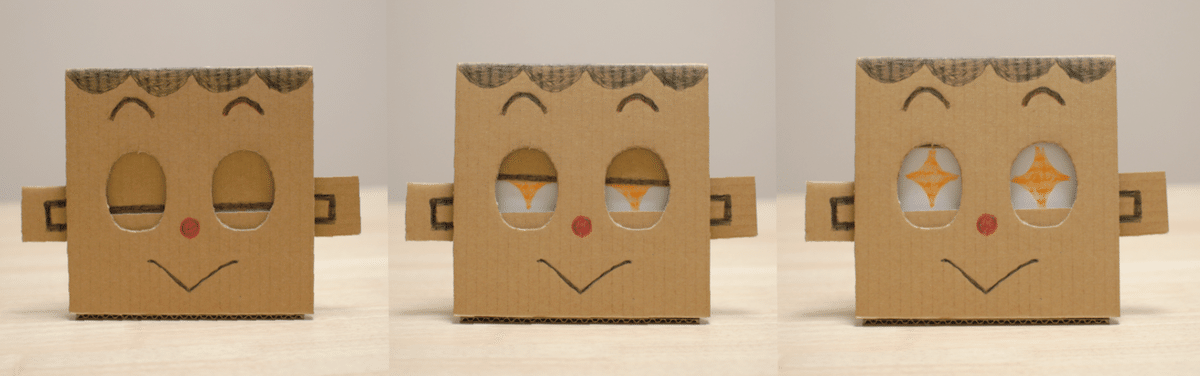
【2】ロボの表情を決める
まぶた、目、鼻、口、耳などの、表情を考えます。
目を閉じているときと、目を開けたあとの顔の変化をイメージしておもしろい表情を決めてあげましょう。
💡表情デザインシートを使うと考えるときに便利です。
購読者の方はページ下部にあるシートをぜひ印刷して使用してください!

【3】目以外のロボの顔をつくる
顔を段ボールに下書きし、目穴をくりぬきます。
※ くりぬく目穴の大きさは まぶたの大きさ以下、目の上は まぶたの大きさ以上空けてください。
まぶたを上に引っ張った時に、まぶた分のスペースがないと頭からまぶたがはみ出ちゃいます。ぽっこーん🤯
※ 目と目の間は 3cm 空けてください。
おもりの5円玉が目に引っかかってしまいます。


口や耳などの色を塗りましょう。

【4】目をつくる
目の土台に、コピー用紙を貼ります。
まぶたが開いたときに見える目玉の部分になります。

【5】おもりをつくる
つくり方はとても簡単、結束バンドに5円玉を通すだけ!
(5円玉って穴が開いてて便利ですね💰)
筆者は6枚通しました。

【6】ひも巻き取り装置をつくる
モーターに少し細工をして、ひもを巻き取る部品に改造します🛠
わり箸の先っちょを2本用意し、モーターに取り付けます。
写真のように、根元をテープでぐるっと留めてから、さらに結束バンドで固定してください。

わり箸の先には、段ボールで壁をつくってあげます。
グルーガンで留めましょう。
ひもを写真のように結んで、モーターを回してみてください。
ひもがくるくる巻き取られたら完成!

(試したあと、ひもをはずしておいてください。)
これにて、部品の準備完了です!
手元に以下のものが揃っていることを確認してください。

ありましたか?完璧です!
では、この部品たちを組み立てていきますよー!💨
顔を組み立てる
ー1層目ー
まずは、顔を裏返しにして準備します。

ー2層目ー
柱2本、下まぶた2枚、まぶた、おもり、ひも、を用意します。
柱 :両端に接着
下まぶた:目の穴から 1cm ほど見える位置に配置し、接着
まぶた :おもりと、ひもを貼る
→どちらもまぶたの真ん中に貼ってください。
おもりは、まぶたが閉じ切った状態でちょうど床につくくらいの長さにすると良いです。
※ まぶたは動く部品です。本体に接着せず、置くだけ!

試しに手でまぶたを動かしてみましょう。
おもりがあるので自然とまぶたが落ちていきますね💰
しゃこしゃこ。
ー3層目ー
2層目で貼った下まぶたと柱をもう一度貼り、厚みを出していきます。

ー4層目ー
4層目では目を貼り付けていきますが、目にはまだ目玉が描かれていません。
目の底辺と、下まぶたの底辺、を合わせて目を置きます。
その状態で表の穴から見える位置に目玉を描いてあげましょう。
描けたら本体に貼ります。

目が貼れたら、わり箸を本体の上部に貼ります。
わり箸の両端にのりをつけて柱に貼ってください。
貼れたらひもを引っ張ってみましょう。
ちゃんとまぶたはスムーズに動きますか?
動いたら次へ!
ー5層目ー
最後に耳をつけてあげます。
また、まぶたが上がりきったときに頭からはみ出さないよう、ふたをしてあげます。

(ふたをしないと、このように頭からまぶたが飛びでちゃいます 🤯 )
これにて、顔の組み立て完了です!👏
ひもを上に引っ張るとまぶたが上がり、
手を離すと自然に落ちていく仕組みができました!
(スムーズに動かない人は、重りやひもの位置を段ボールにあたりづらい位置にずらすとうまくいくかも。)
動力を設置する
さて、メインの顔の仕組みができあがりました。
しかし、これではまだ手動ですね…
ひも巻き取り装置を設置して自動にしていきましょう!
【1】底面の設置
まずは、顔が自立するように底面(床)をつけてあげます。ぺとり。

床ができました。
しかし、これでは顔が重くてしっかり自立しません…
そこで、四角い箱と三角を使って支えてあげます。
四角い箱はついでにココロキットの収納場所にしちゃいましょう。
ココロキット収納箱:
適当な大きさの段ボールを四等分に折り、端をテープで留めて四角い箱にします。(図面上ではココロキット収納箱という部品)
顔の支え:
適当に切った細長い段ボール部品で直角をもつ三角形をつくります。

それぞれ本体に貼ります。


ココロキットを入れるとこんなかんじ👀

【2】ひも巻き取り装置の設置
まぶたから出ているひもを、巻き取り装置に結んであげます。
2本ある棒のうち、1本に結んでください。

結べたら、余分な長さのひもを巻き取り装置に巻いておきます。
では、巻き取り装置を底面に設置しましょう。
まぶたから伸びるひもがまっすぐになる位置に装置を貼ります。

※貼り付ける前に装置の下に何かを噛ませて、少し頭を持ち上げてください。ひもを巻き取りやすくなります。
(写真ではわり箸の切れ端を挟んでいます。)

最後に、モーターがのぐらつきを抑えるために段ボールで上からカバーしてあげます。ガシャコン。

完成!
試しに巻き取り装置を電池とスイッチにつなげてみてください。
まぶたを上下させられたら成功です!

くるくるくる〜
ぴっかーん✨
これにて、工作編はおわりです!!
お疲れ様でした!👏
後ろの丸見えの装置が気になる人は、床に合わせて壁や天井を設置してあげると、完全にボックス型のロボができ上がります。
次回は音に反応する仕組みを作ります!
プログラミング編へレッツゴー!
すぐに作れる! 寸法付き図面
こちらのPDFデータを紙に印刷すると、段ボールなどを切るときの型紙になります。下記よりダウンロードして使ってみてください。
PDFデータ
*印刷するときは、A4の紙に原寸(等倍、100%)で印刷してください。









便利! ロボの表情デザインシート


購読ありがとうございます!
今後とも kurikit をよろしくお願いします。

この記事が気に入ったらサポートをしてみませんか?