
ハブラシロボットキットを動かしてみよう!

この記事では、kurikitのビジュアルプログラミングを利用してハブラシロボットキットを動かす方法を説明します。

ハブラシロボットキットとは?
あえて車輪を使わず、モーターからハブラシに伝わる振動によりシャトルが走るというユニークなロボットです!
はじめてのロボットづくりから簡単なプログラミング体験ができるロボットキットとして開発・販売してきました。
これまでは、iOS/Androidで専用の操縦&プログラミングのアプリを配信しておりましたが、今回kurikitシリーズの立ち上げに伴い、ビジュアルプログラミング(Scratch3.0ベース)からの操作に対応しました!
必要なもの
・ハブラシロボットキット
・Koshianまたはkonashi(Bluetoothチップ)
・kurikit scratchに対応したwindows/mac/android/iOS端末
※iOS端末では別途WebBLE/Bluefyアプリが必要となります。
ハブラシロボットにKoshianを取り付けよう
ハブラシロボットを組み立てたのちに、プログラミングに対応するためのKoshian(Bluetoothチップ)を取り付けましょう。(現在、ハブラシロボットキットとKoshianは別売りとなっております。)

次に、スイッチを右側(konashi-driven)にして電池を入れます。ハブラシロボットキットの先頭の黄色いLEDが点灯すれば準備完了です。


PCまたはタブレットを用意する
以下の動作環境を満たすPCまたはタブレットを用意します。

kurikitビジュアルプログラミングを開く
上記指定のWebブラウザ上で、以下のURLをクリックしてビジュアルプログラミングページを開いてください。
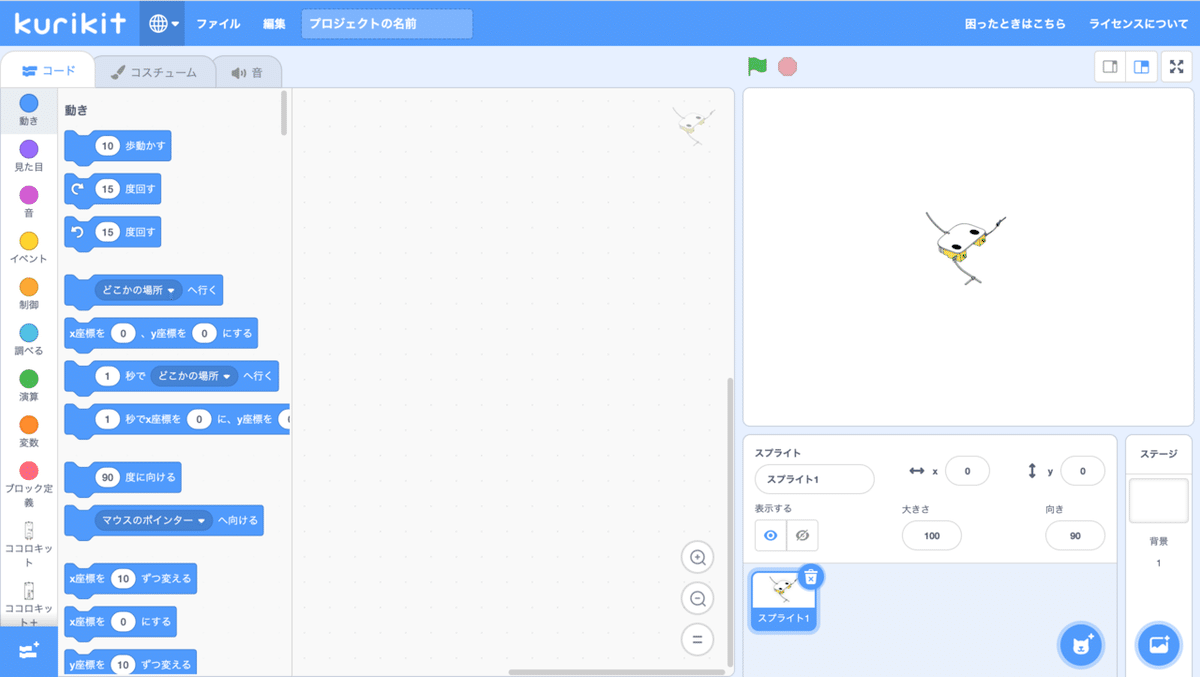
ページを開くと、上の画像のような画面が表示されると思います。ハブラシロボットとビジュアルプログラミングをつなぐためのステップは2つです。
1.拡張機能から「konashi」を追加する
2.konashi(=ハブラシロボット)とBluetooth接続をする
では、やっていきましょう!
拡張機能を追加する
ハブラシロボットをビジュアルプログラミングで使うためには「拡張機能」と呼ばれるScratchの機能を使います。
拡張機能は、左下のボタンを押して利用します。左下のボタンを押すと「拡張機能を選ぶ」というページが表示されるので、「konashi」をクリックします。



kurikit ScratchとハブラシロボットをBluetooth接続する
追加されたコマンドの中に、「接続する」という楕円のボタンがあると思います。この「左にある白い四角」をクリックしてください。

すると、接続するための画面が表示されます。

正しくKoshianと接続できていれば、デバイスが表示されますので、接続したいデバイスをクリックしてペア設定をクリックします。

正しく接続できると、右側のステージに「接続しました」と表示されます。
ハブラシロボットを動かしてみよう
左のモータはPIO0という端子に、右のモータはPIO1という端子につながっています。
端子をHIGHにするとモータがオンとなり、LOWにするとモータがオフになります。
したがって以下のブロックを組み合わせることで、前進・右旋回・左旋回のプログラミングをすることができます。


Scratch上で動かすシュミレータとハードウェアとしてのロボットのどちらも動かすことができるので、楽しいですよ!
PWMという出力のパワーを調整するブロックでモータのパワーを変更することもできます。コマンドの詳細はこちらの記事で解説しています。
kurikit Scratchでハブラシロボットのスプライトを読み込む(オプション)
上記のファイルを、右下のスプライトを読み込むから開くと、下のようにハブラシロボットの画像が表示されます!

背景から、宇宙のものを挿入すると宇宙空間を飛行するハブラシロボットが!再現できます。

ハブラシロボットキットは、まっすぐ前に進ませることは難しいのですが、モータの回転の強さを調整してみたり、奥が深いロボットの世界を体験してみてください。

この記事が気に入ったらサポートをしてみませんか?