
集中力タイマー だだもん を作ってみよう!

こんにちは、ユカイ工学のkurikitチームです!
2020年6月より続いていた、女子美術大学 × ユカイ工学kurikit 『ユカイなロボット開発プロジェクト』。
今回は制作作品の中から、『集中力タイマー だだもん』のつくりかたをご紹介します!
工作レベル:★★★★★
制作時間:約50時間

材料と道具

・ユカイな生きものロボットキット
・ココロキット
・3Dプリントしたボディ
・紙粘土
・直径3ミリのアルミパイプ
・フェルト
・面ファスナー
・速乾性トップコート
・両面テープ
・セロハンテープ
・ボンド
作り方
1. fusion360で3Dデータを作ります。

先生が作ってくださったモーターのサイズに合わせてボディを作っていきます。
最終的には小さいサイズで完成させましたが、小さいサイズと大きいサイズの2タイプ制作したのでこの時点で15時間ほどかかりました😰
3Dプリントしたものがこちらです!

これがあれば半分は完成です!(笑)
2. モーターの回転部に結束バンドをつけボンドなどでしっかり固定します。
ボンドがモーターの中に入り込まないように気をつけてください!
使いやすいようにここでコードも短く切ります。(切ったところはショートしてしまう可能性があるため、テープで保護しましょう)
またバラけないようにモーターを輪ゴムでまとめます。

3. scratchを使ってココロキットのプログラミングをします。
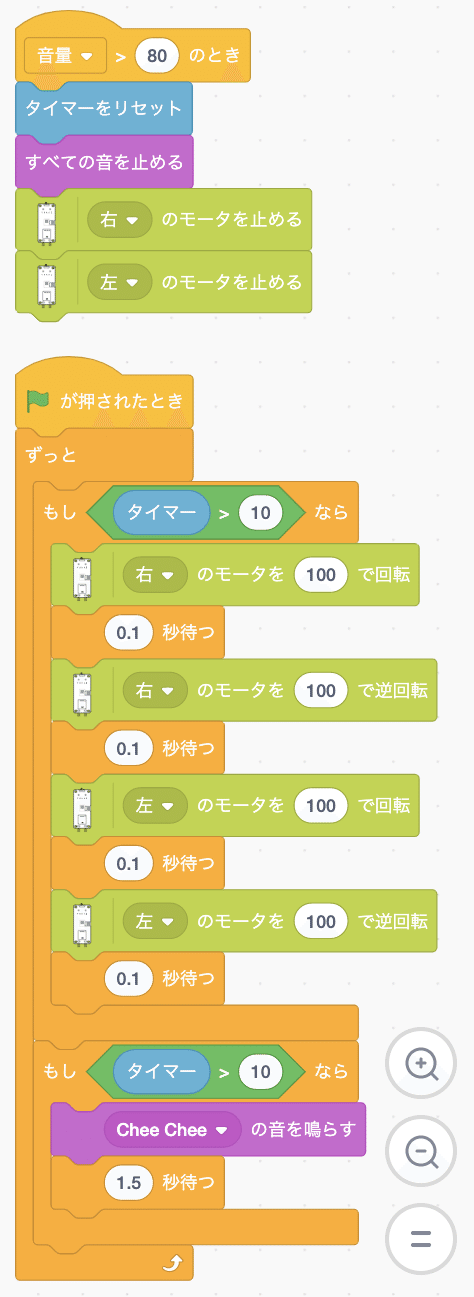
タイマーと音量機能を使います。
もし<10秒>以上ならちーちーの音を鳴らしながら動きまくるという設定でちゃんと動作するか実験を繰り返していきます。
実際に完成して使う際は<10秒>の値を15分(900秒)〜30分(1800秒)に設定します。
4. モーターとボディを組み立てます。

アルミパイプをモーター+柱+αの長さに切って柱とボディに通します
アルミパイプはボンドで固定しなくても大丈夫でした😀
5. ボディの上下をセロハンテープでぐるぐる巻きにして固定します。
あとで結束バンドが中で詰まってしまった際にセロハンテープを剥がして開いたりしますが、セロテープの価格は高くないので惜しみなく使いましょう。
6. いよいよ動くか試します!
うごきました!!

この時はまだボディを固定していなかったのでかなり力強く押さえていないといけませんでした。
7. 紙粘土で手足を作り、丸一日乾燥させます。

家に青い紙粘土しかなかったのでアクリル絵の具で白く塗装するという工程がありますが最初から白い紙粘土を買えば省けます。
またはお好きな色に塗りましょう!
ツヤツヤかつ、ポロポロ剥げてこないように速乾性トップコートを塗ります。

8. フェルトで皮を作ります。

ボディにフェルトを合わせてマチ針で固定しながら焦らずゆっくり裁断します。
慎重派なのでここでもかなり時間を使いました。
表面に縫い合わせた痕を出したくなかったのでセロハンテープより粘着力がある両面テープで繋ぎ合わせていきます。
両面テープの剥離紙を剥がしたらそこにセロハンテープを貼ってベタベタをカーバーします。
二度手間ですが縫い合わせるより外側の見た目が綺麗なので頑張ります。

9. 背中側に面ファスナーをつけます。
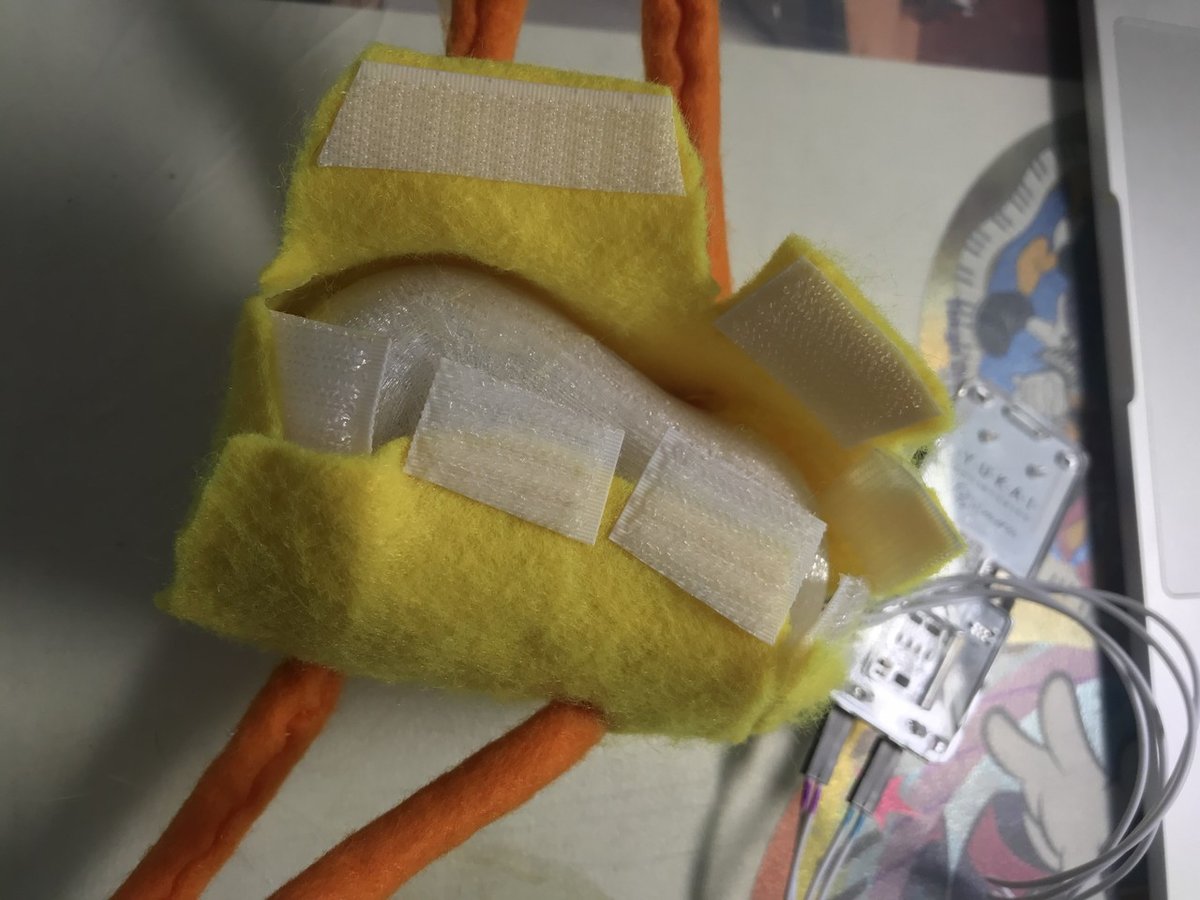
ボディの丸みに沿って面ファスナーを小さめに貼り付けるのがポイントです。
面ファスナーのチクチクした方がなるべくフェルトとくっつかないようにしましょう。フェルトがボソボソになります。
10. 顔のパーツと腕をフェルトで作ります。

顔は両面テープで貼り付けました。
腕はフェルトで太めに筒を作りはしご縫いで縫い合わせました。
腕は太めにしないと動かした際にねじれの原因になります。
直径1cmが最低の太さです。
11. 手足のパーツをボンドでつけてボディに着せたら完成です!!
\わーい!/

動かしている最中にねじれてしまったり結束バンドがボディの中に入り込んでしまったりするのでその時はその都度開いて調整する必要があります。
そんな手間も愛しく感じながらだだもんを隣に置いておきましょう!👶

製作者:杉原さやか (女子美術大学)
この記事が気に入ったらサポートをしてみませんか?