
2足歩行ロボットを作ってみよう

この記事ではシンプルな2足歩行ロボットの作り方を紹介します!

Created by modifying "Otto DIY" (@ Camilo Parra Palacio (Licensed under CC BY 4.0))
工作レベル:★★★★
制作時間:15時間(3Dプリントの時間含めず)
使用するもの
ココロキット+(1個)
ココロキット+の内容物
ココロキット+(1個)
サーボモータ(2個)[ ホーン(3種各2個)、ネジ(長4 + 短2)付 ]
スイッチ(1個)
追加用サーボモータ 2個 ※a
ネジ:M2×10 2本
3Dプリンター
ニッパー
精密ドライバー
Fusion360などのCADソフト
※a
2足歩行ロボットの製作には、サーボモータを4つ使用します。ココロキット+に付属しているサーボモータに加え、追加で2つ用意が必要です。
ハードウェア制作編
ここでは Otto DIY によって製作されているものを少しアレンジして使用します。いろいろな製品の3Dのデータがオープンソースで公開されており、3Dプリンターを使って自分で作れるようになっています。
今回は1番シンプルな看板製品といえる Otto DIY を使っていきます。
製品内で使用されているモータはココロキット+と同じなので、基本的にそのままプリントしていきます。
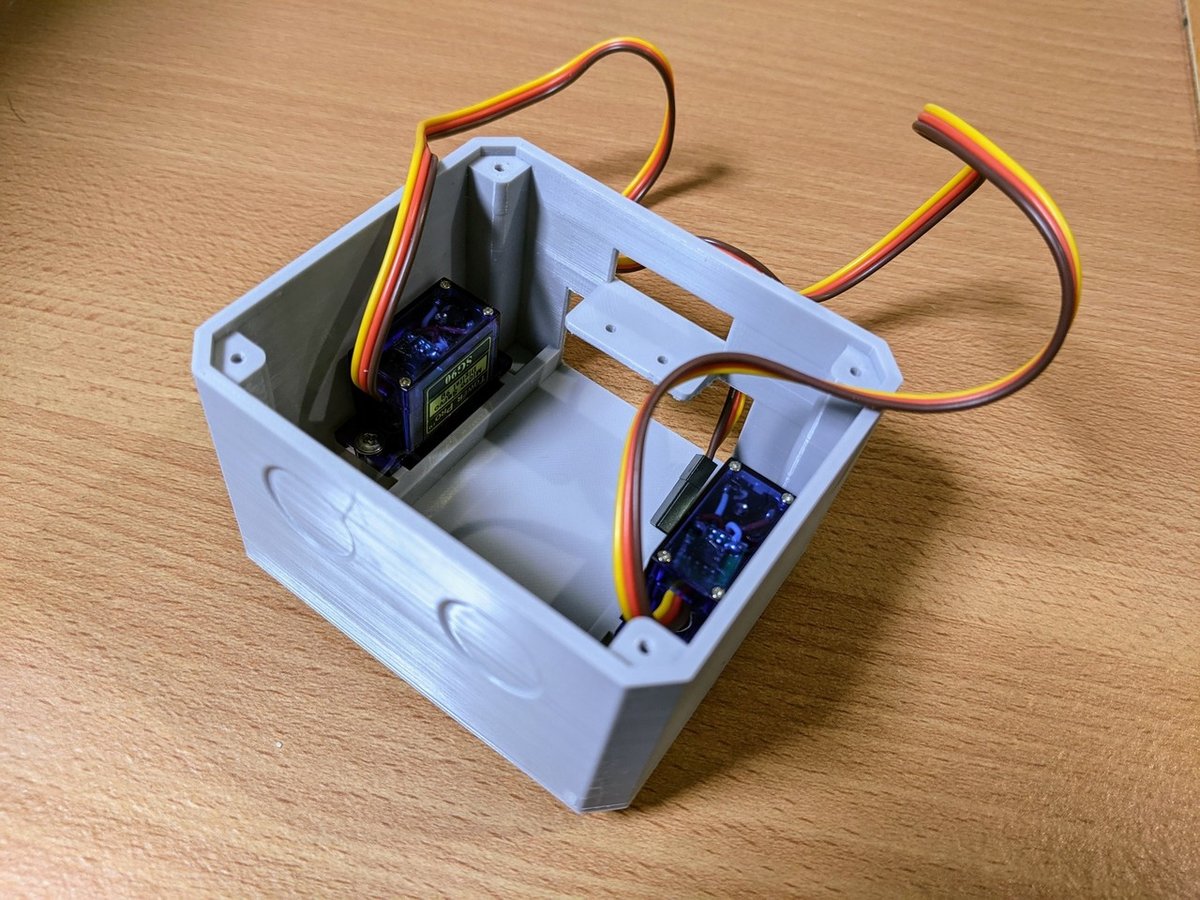
しかし使用している基板やセンサーが異なるため、頭の部分はココロキット+に合わせたものを設計します!
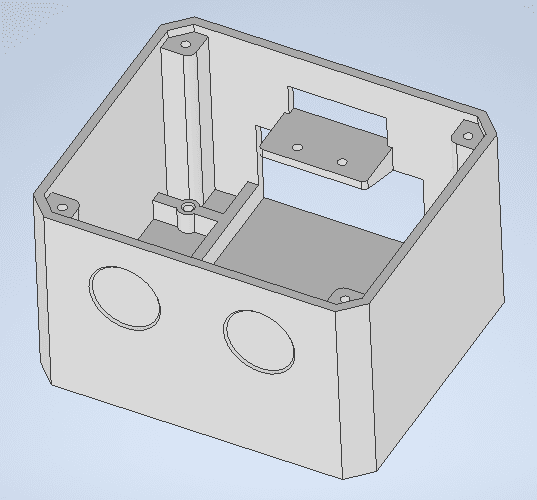
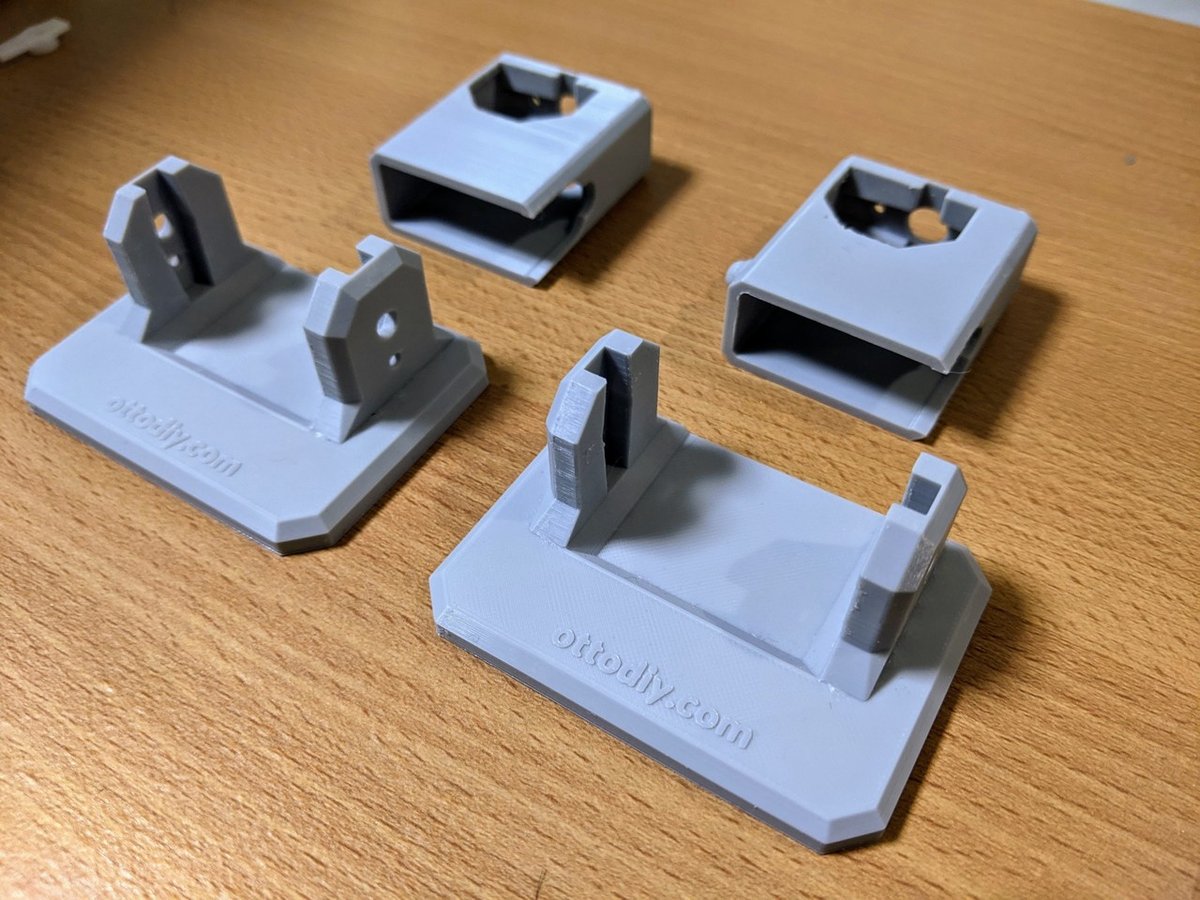
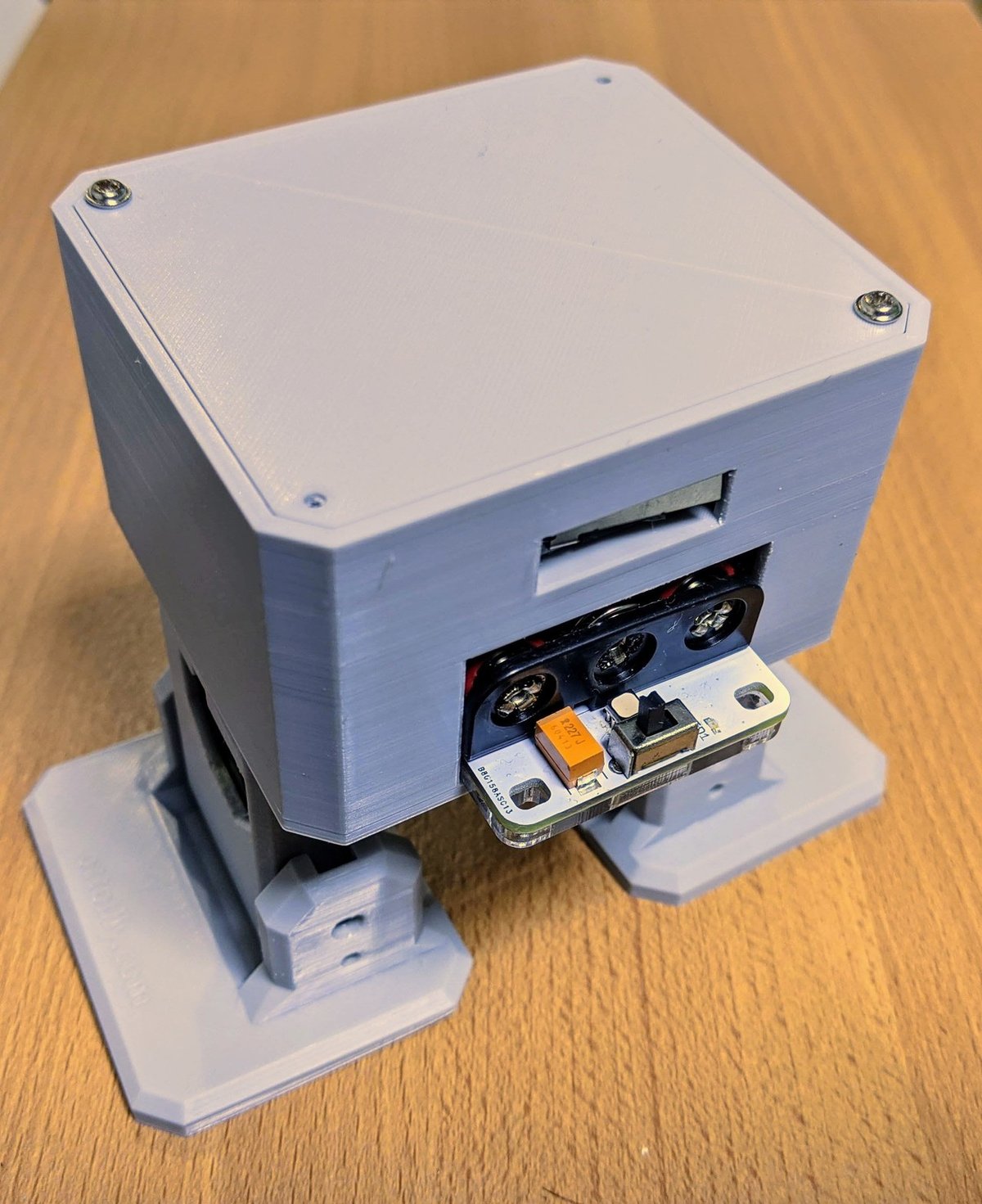
奥に見える台座はスイッチを固定する場所です。
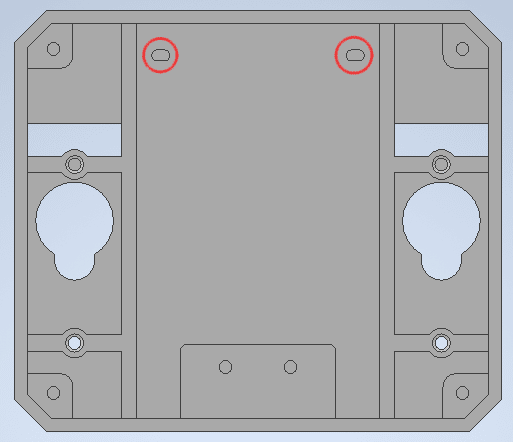
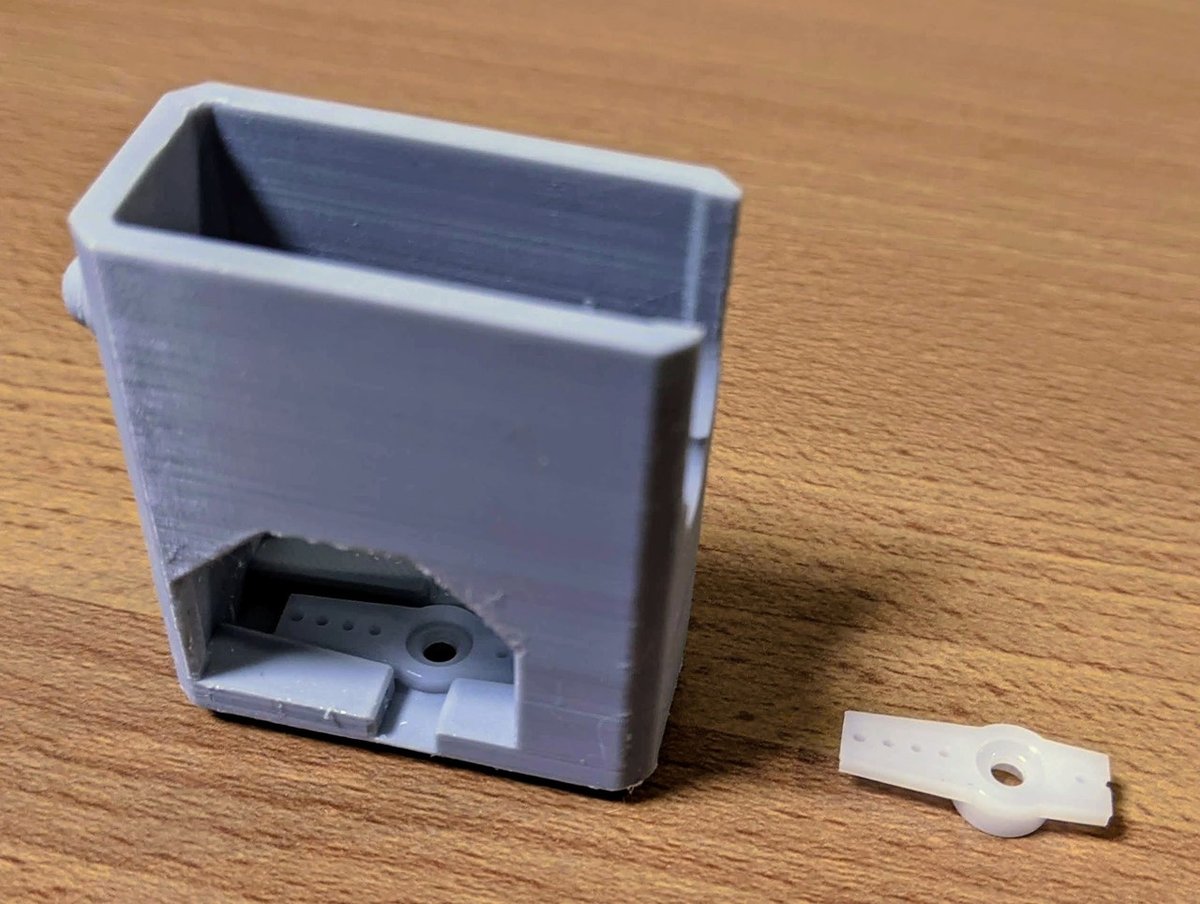
こちらは上から見た図ですが、赤い円で囲んだ部分に基板の穴に引っ掛ける出っ張りをつけています。これに加えて頭のフタもプリントします。
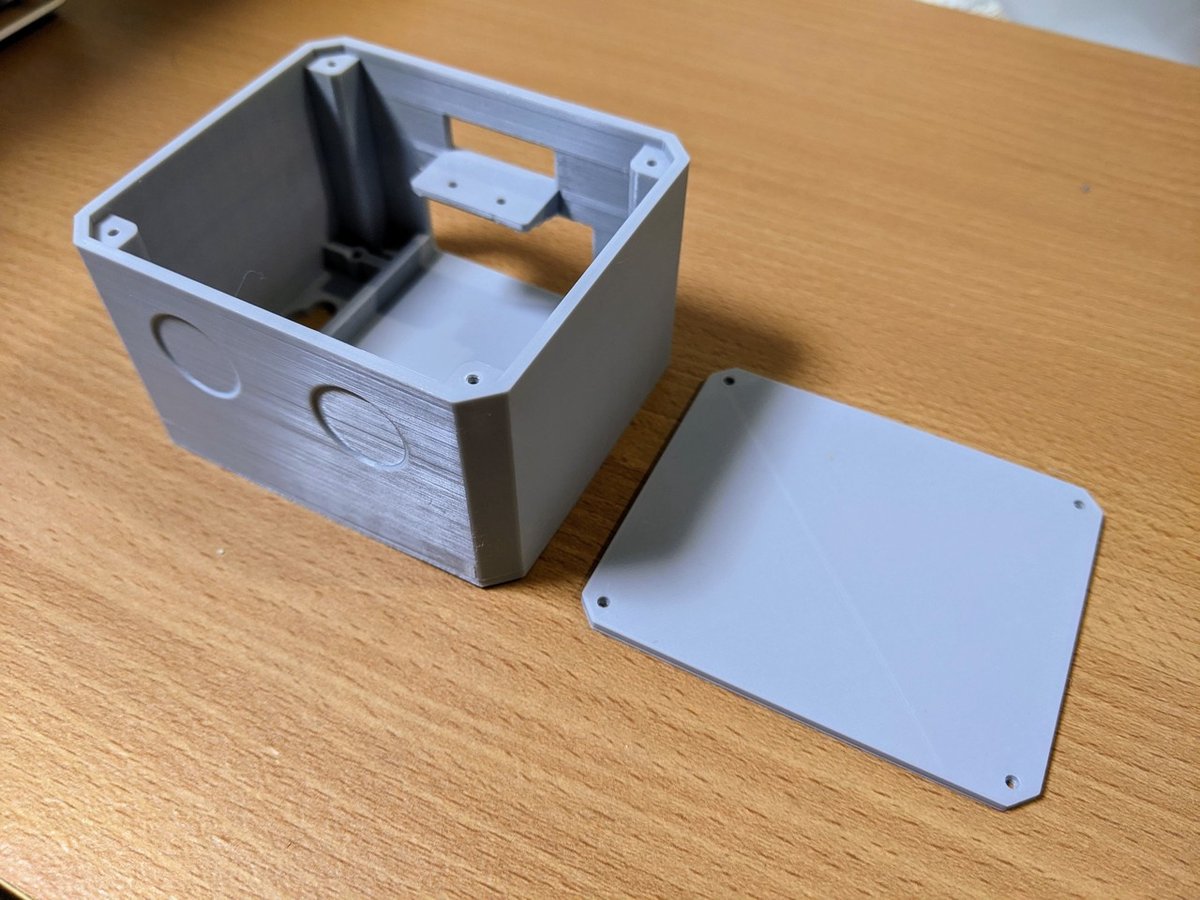

できました!これでパーツがそろいましたね!
組み立て編
サーボモータが動作範囲のほぼ真ん中に向いていることを確認してから組み立てましょう!
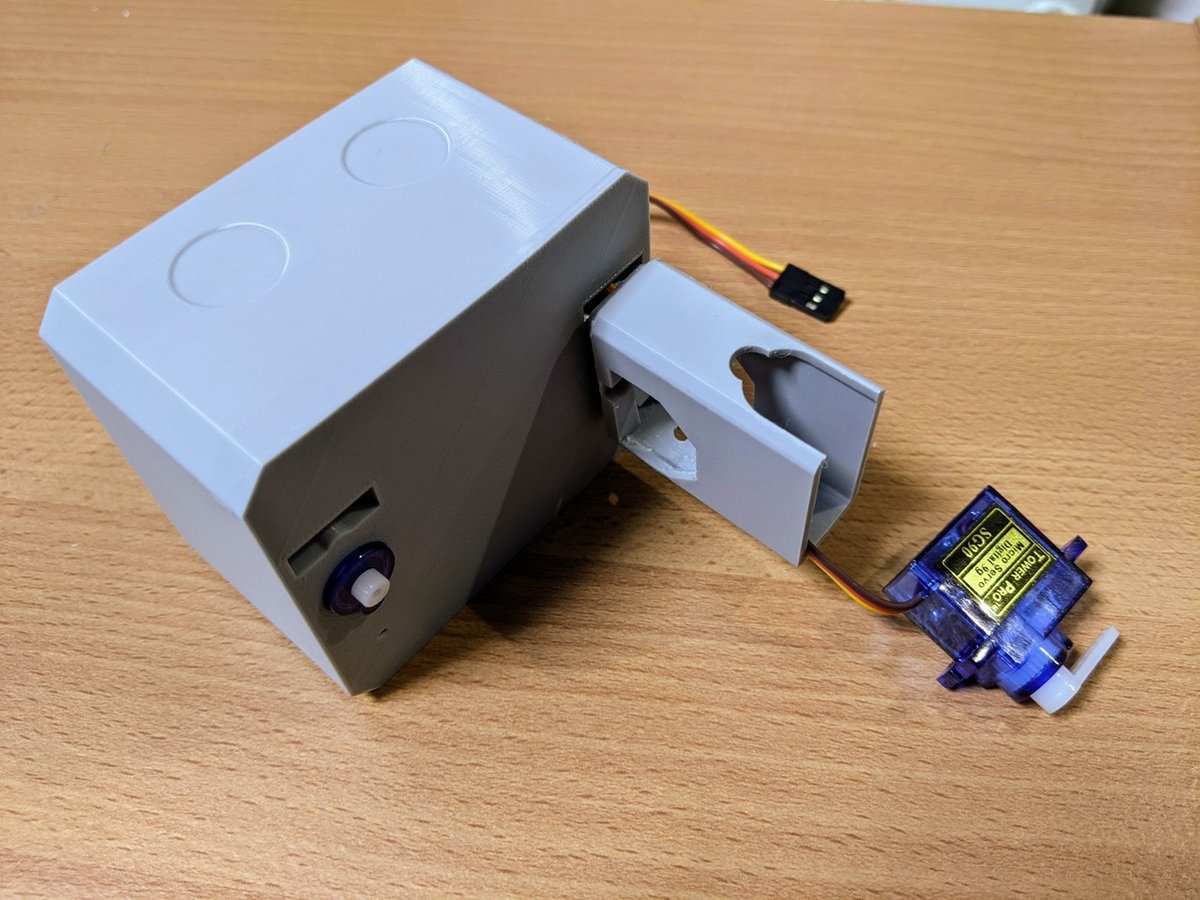
1.頭にモータを付属のネジで取り付けます
2.サーボホーンをニッパーでカットして足の上半分のパーツに埋め込みます
3.足の上半分を取り付けます
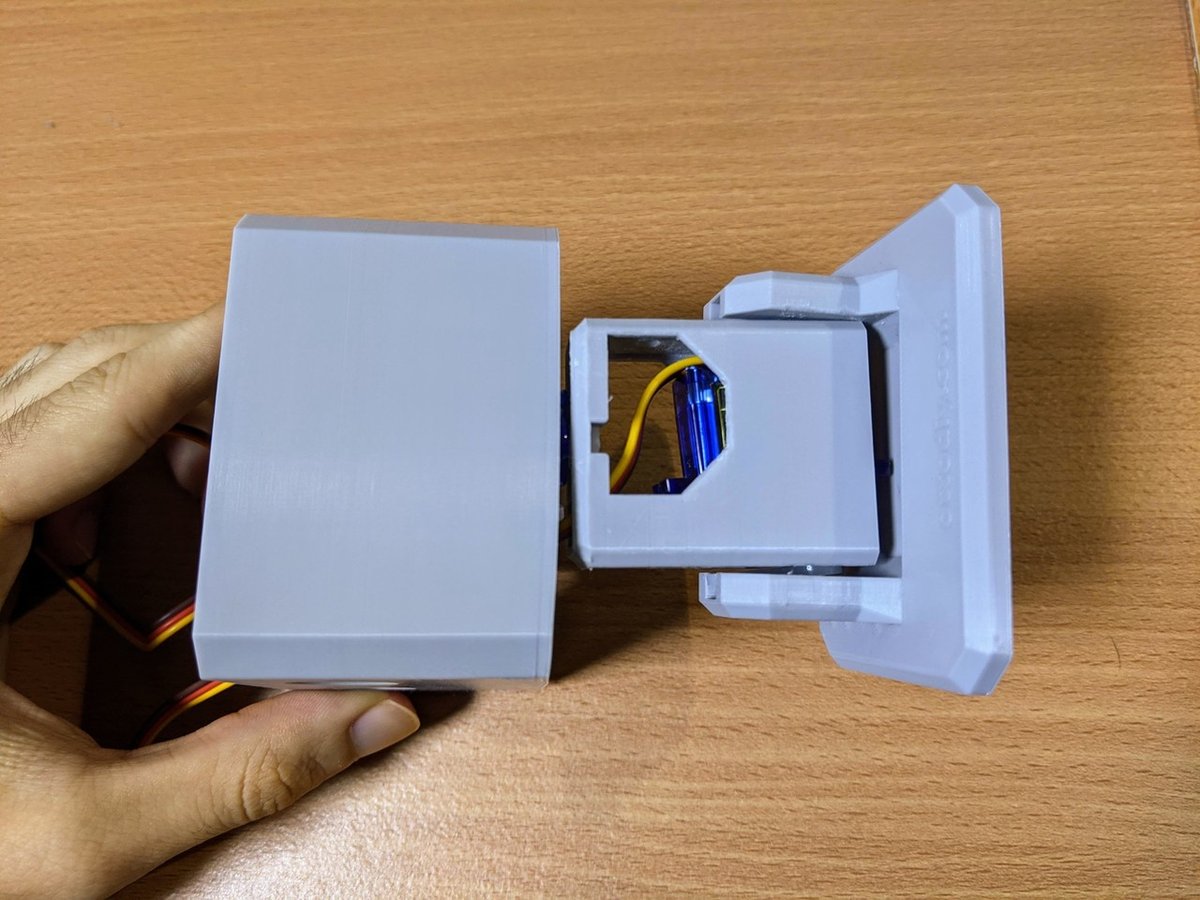
ケーブルを頭に通しつつ、先ほど埋め込んだサーボホーンを頭のモータに差し込み、ネジ止めして足の上半分を取り付けます。

4.足の下半分を取り付けます
モータを指で押さえて...
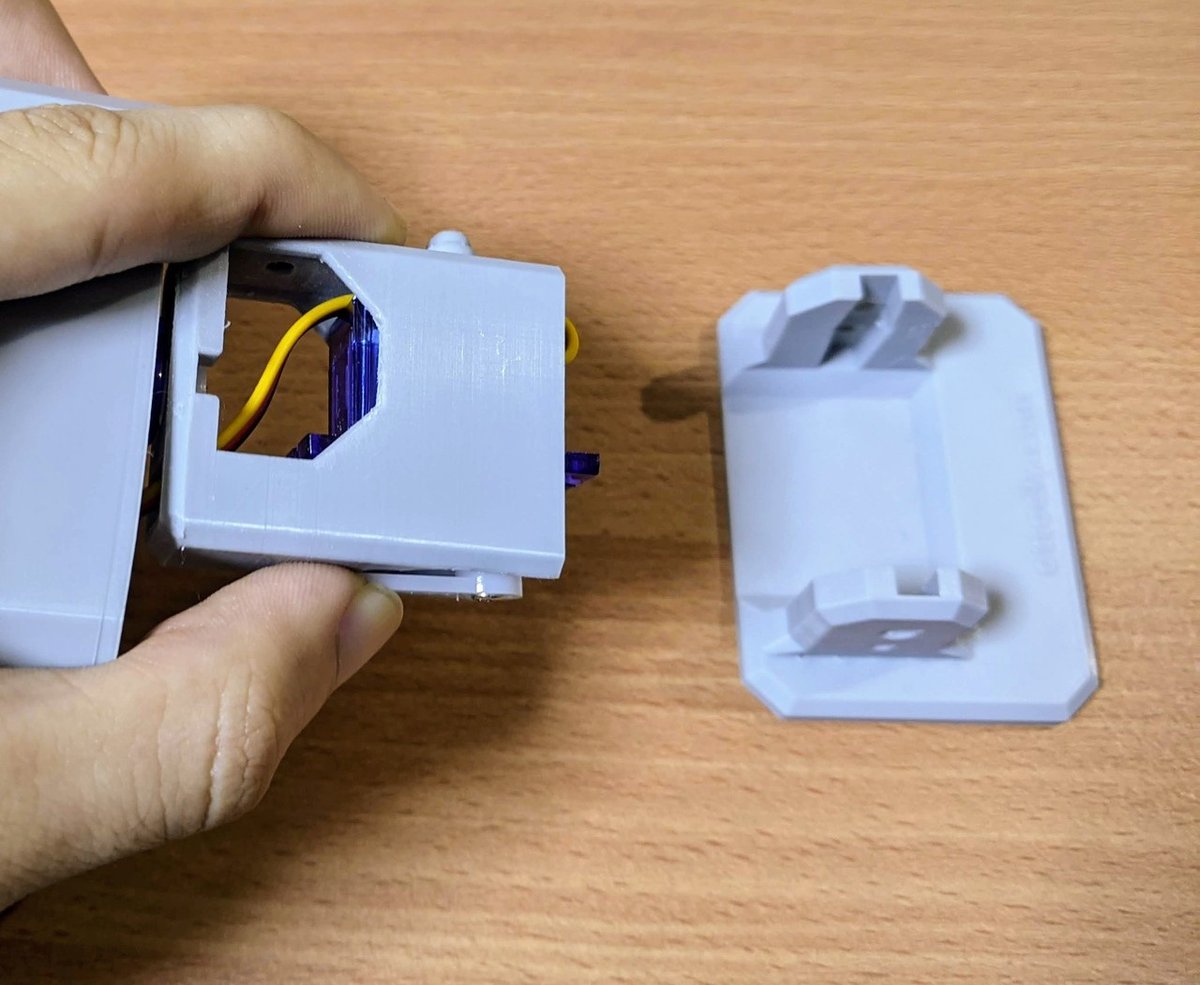
押し込みます!
少しだけパーツをたわませる感じになります。力はほとんど必要ないので割れないようにだけ注意しましょう。
5.足首のモータを固定します
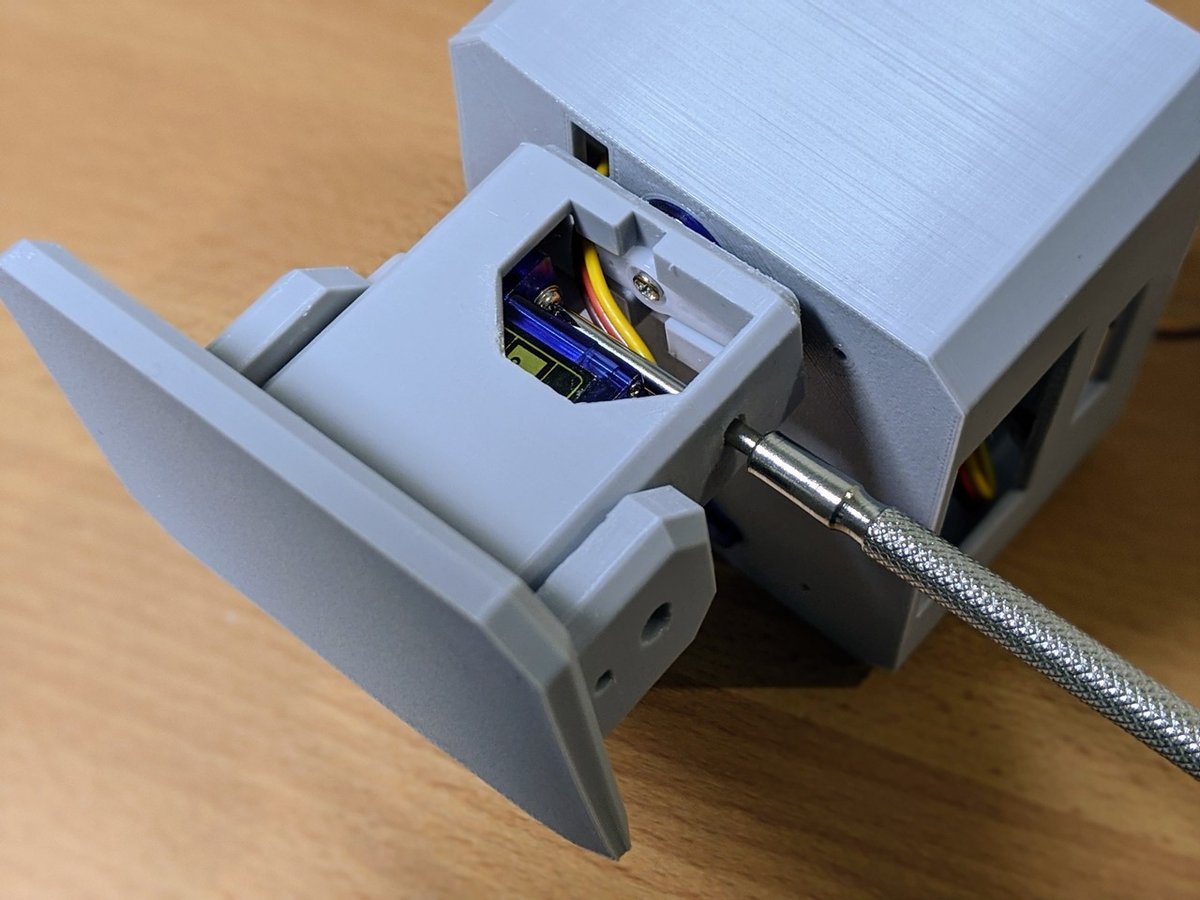
ドライバーを通す用の穴が空いていてとても親切ですね!このあたりで多少の器用さが要求されますが頑張りましょう!
もう片方の足もこれまでと同じ手順で組み立てます。
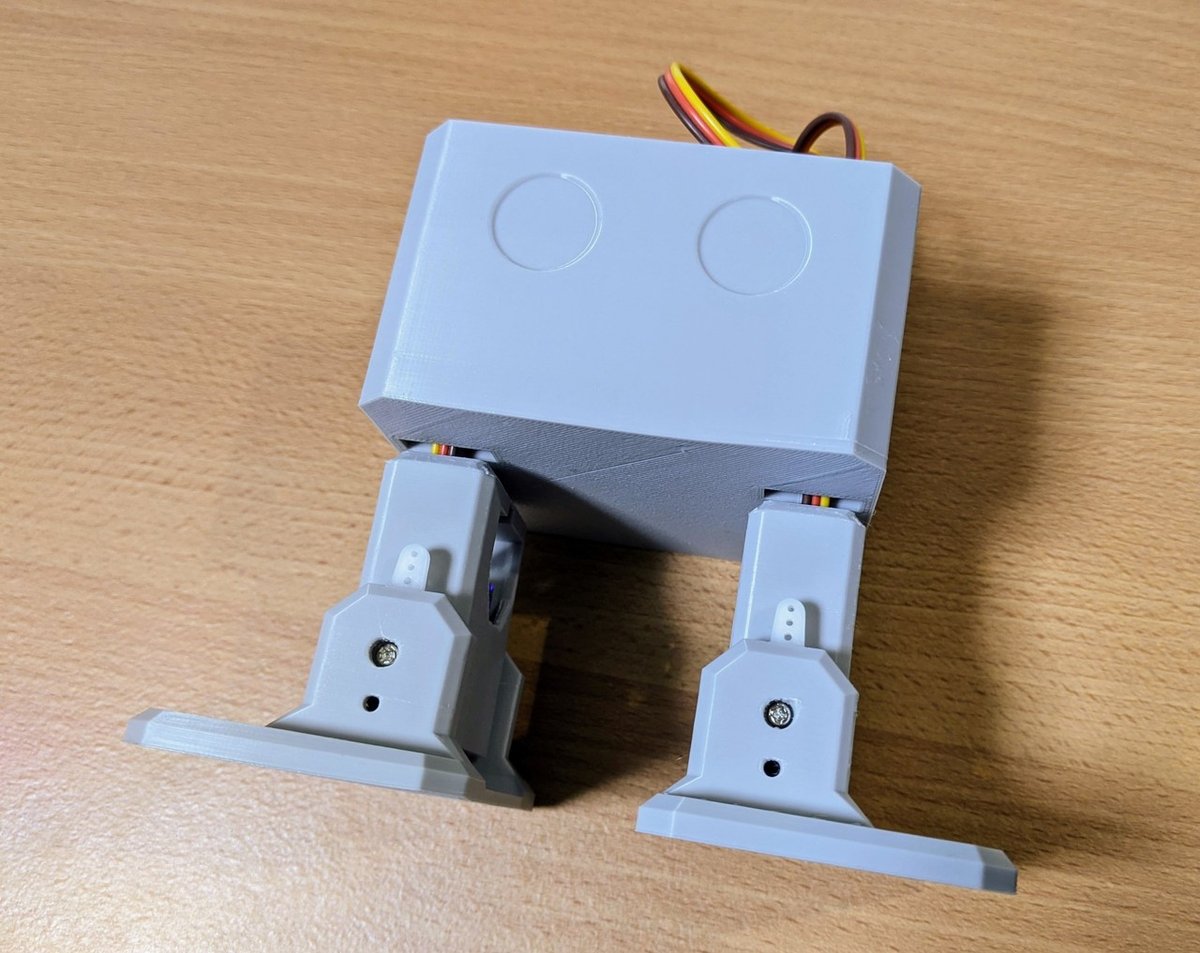
完成が見えてきました!
6.配線とスイッチ取り付け
ココロキット+の基板の穴を頭の中の突起に引っ掛けるように配置します。
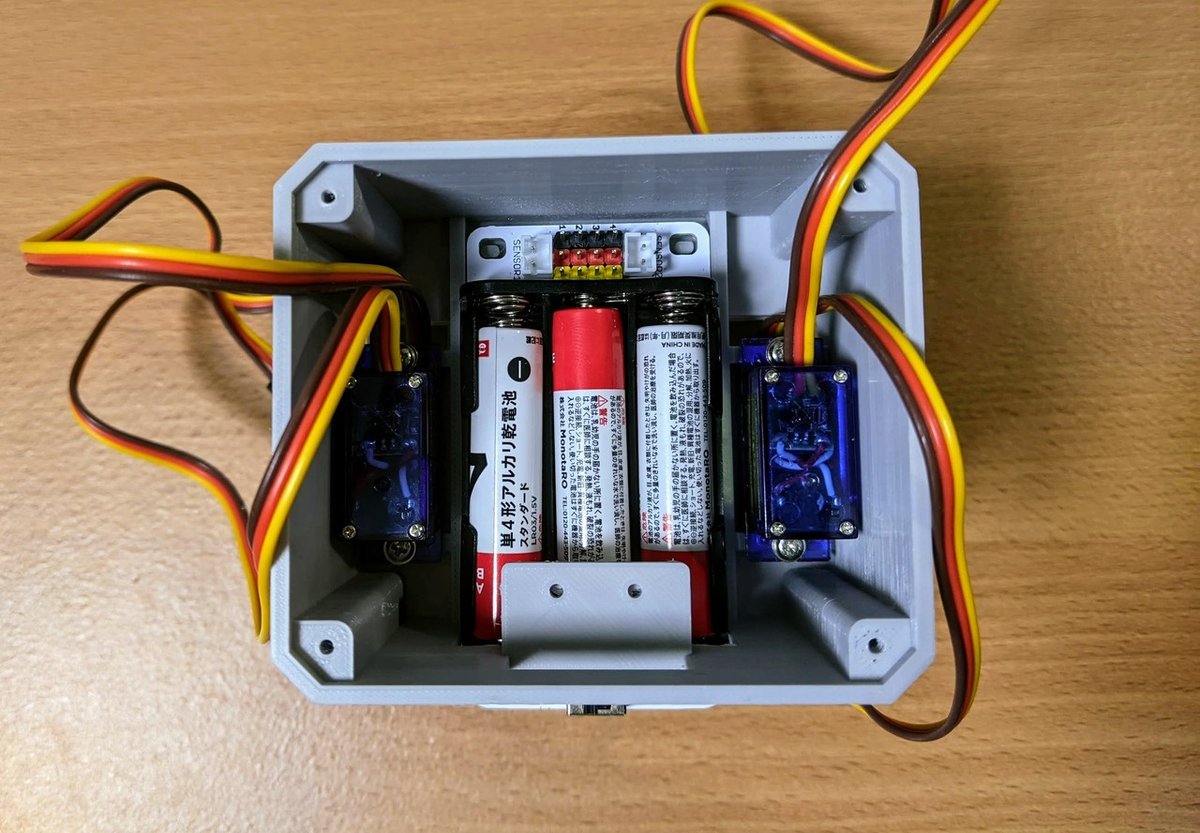
モータとスイッチのケーブルを差し込み、スイッチを固定します。
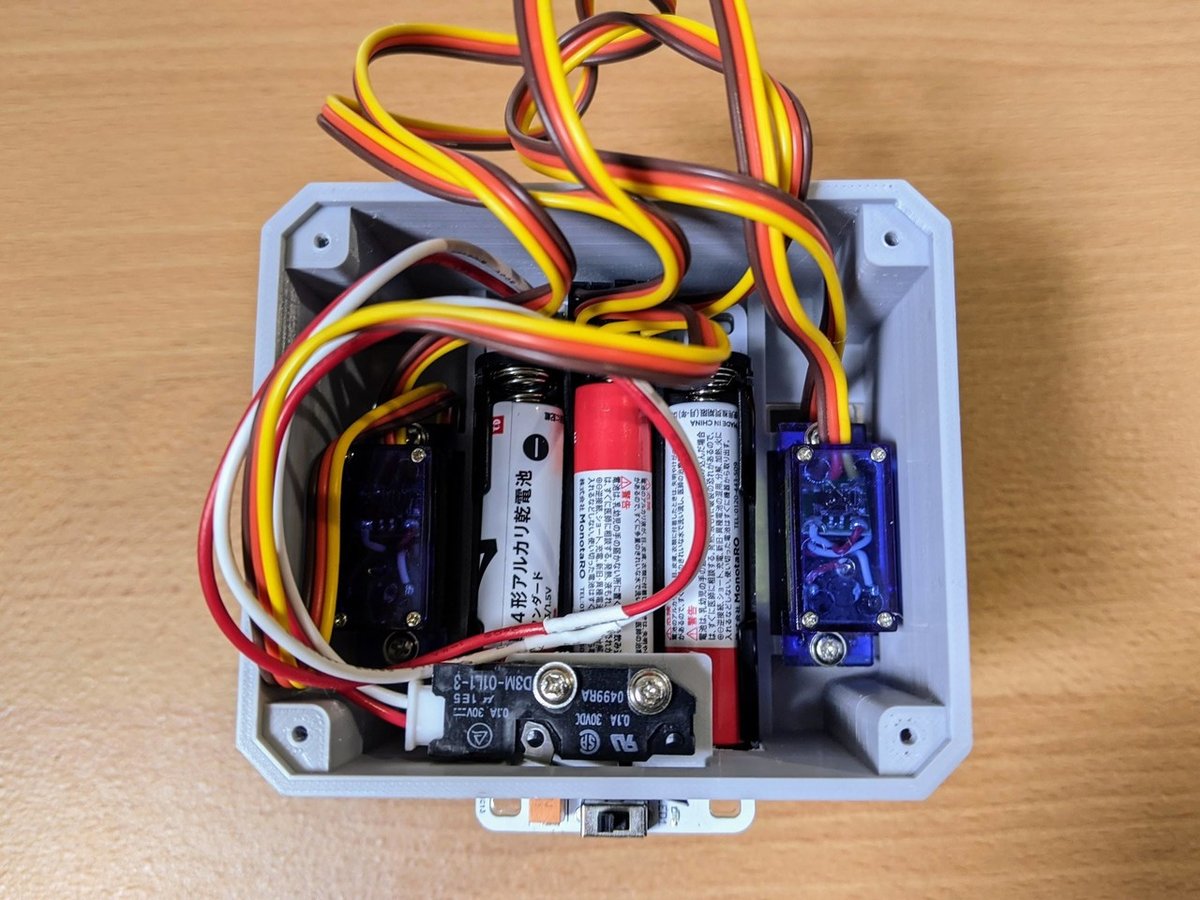
付属品のネジでは長さが足りないので、ネジ止めしたい方はm2の長さ10mm程度のネジをご用意ください。なければ両面テープでも大丈夫です!
7.フタをします.
付属品のネジでフタを固定します。2か所止めれば十分です。
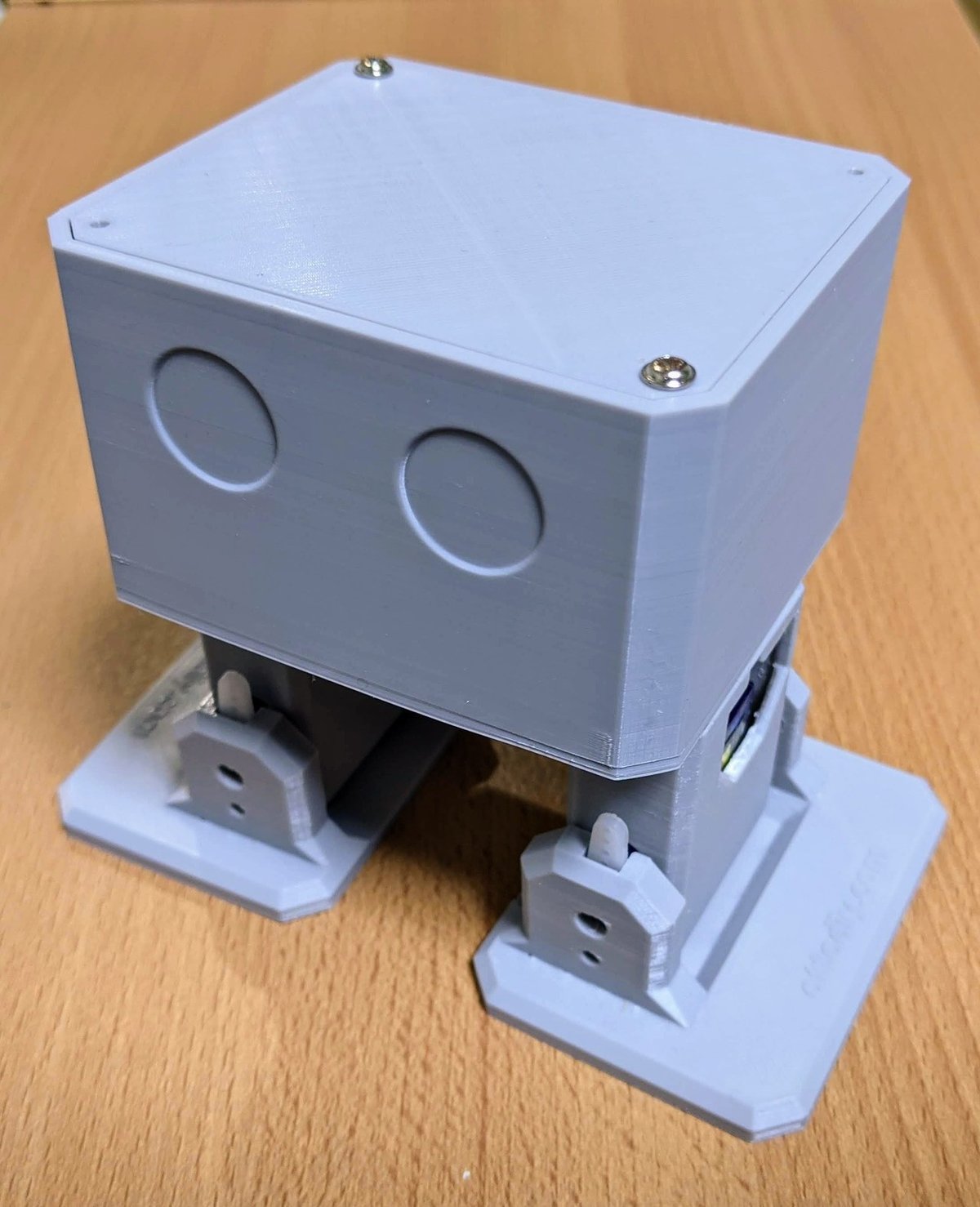
これで完成です!
ソフトウェア編
初期化
まずはじめに「モータがどの角度の時に足がまっすぐ向いているのか」を確認しましょう。取り付け方によって95度だったりするので「30度傾けたい」と思った場合は125度を入力するようにします。
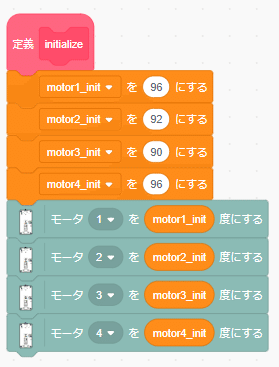
動作確認の最中に姿勢を戻したくなることも多いのでこのような関数を作っておくと便利です。
カニ歩き
では簡単な動きとしてまずはカニ歩きをscratchで作ってみましょう。
足の付け根は動かさず、タイミングをずらしながら足首のモータだけをパタパタと動かしていきます。

使いまわせるように関数にしました。左右どちらに歩くかを動作回数の正負に対応させています。

動きました!滑りやすい床でも歩いてくれました!
歩行
では次は前後に歩かせてみましょう。関節の数が2個と少ないですが、工夫すればちゃんと歩いてくれます!
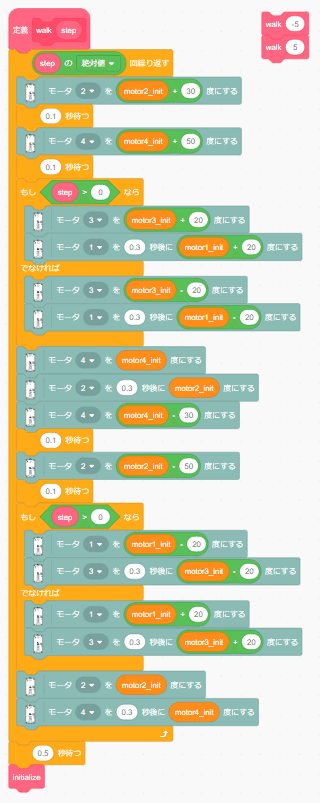
文章で説明するのは難しいのですが...「片足立ちで体を傾けて,軸足の付け根を回転させる」という動作を繰り返すことで前後に移動するようにしています。何秒後にどの程度モータを動かすか、というのはちゃんと歩く数値を何度も実験して探し当てています。
サンプルプログラムは、こちらのリンクから見ることができます!
うまく調整できるとこのような動きができます!

頑張って歩いている感じがしてかわいいですね!
今回の作例は3Dプリンター使用となっていて少しハードルが高いですが、ココロキット+はこのような複雑な動作も出来るキットです。
工夫次第でいろいろなロボットが作れるのでぜひチャレンジしてみてください!

この記事が気に入ったらサポートをしてみませんか?