
電池を入れて動かしてみよう!

この記事では、ユカイなパチパチブロックキットのモータを動かす手順を紹介します。
センサスイッチやモータの線をコアユニットにどうやってつなげればよいか、この記事を見ながら一緒にやってみましょう!
用意するもの
・コアユニット
・単4電池 3本
・センサスイッチ
・回転モータ
・フレーム(なにか1つ)
1. 電池を入れます

まずは、フタを開けて電池を入れましょう。
フタの開け方にコツがいるので落ち着いて開けてくださいね。
図のようにコアユニットを縦に持つと開けやすいです。
電池の向きには十分に注意しましょう。入れ終わったらフタを閉めます。
2. つなぐ

モータとセンサスイッチをコアユニットとつないでいきます。
まずセンサスイッチは「SENSOR1」と小さく書いてあるところにつなぎます。このとき、スイッチには差し込める向きがあるので注意してください。スペースが狭いので手で押し込めなかったら先端が細い道具を使いましょう。
次にモータをつなぎます。線の色と台座の色の組み合わせが同じになるように気をつけて、小さく「1」と書いてあるところにつなぎます。
ここまでの手順でセンサスイッチを使ってモータを動かす準備ができました。
3. 動かす
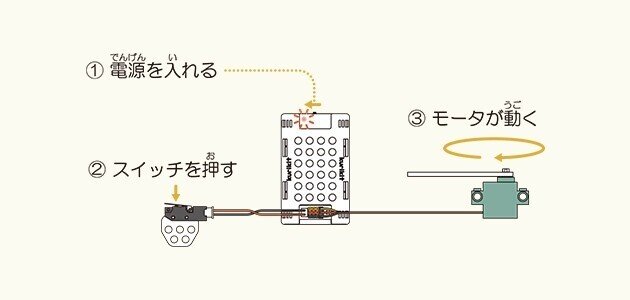
次に電源を入れて動かしていきましょう。
コアユニットの側面に黒いスライドスイッチがあるので、それを横にずらして電源を入れます。小さな赤色の光が電源が入った証拠です。
この状態になったらセンサスイッチをカチッと押してみてください。
ギュインという音でモータが動きますか?
4. 動きを変える

つなぎ方やつなぐモータを変えると、動き方も変化するので色々試してみましょう!
例えば、つなぐモータを「回転モータ」から「角度モータ」に変更してみたり。センサスイッチをつなぐ場所を「SENSOR1」から「SENSOR2」してみたり。動く速さや角度の大きさが変化するので、試しながら動き方を観察してみましょう!
【動画で解説】 組み立て手順
ここまでの手順は動画でも解説していますので参考にしてくださいね!
ここまででモータを回す方法がわかったので、次にフレームを組み合わせて作れるロボットの作品について解説していきます。
次はこちら 👉
ユカイなパチパチブロックキットのマガジンはこちら 👉
この記事が気に入ったらサポートをしてみませんか?