
お家で作る二足歩行ロボット

kurikitの「ココロキット+」と身近な材料を使って二足歩行ロボットを作ってみましょう!ものづくりに慣れてきて少し難易度の高いものに挑戦したい方にオススメです!
制作難易度:★★★☆☆
制作時間:3時間
用意するもの
・ココロキット+ ×1
・サーボモータ ×4 ※a
・ホーン 2種×各2 ※b
・ダンボール(厚さ3㎜推奨) A3サイズ
・パーツ型紙(ダウンロード) ×2
・セロハンテープ
・両面テープ
※a
ココロキット+に付属しているサーボモータは2つです。さらに2つ追加の用意が必要です。
※b
ホーンはココロキット+の付属品です。形は下の写真をご参照ください。

工具
・カッター
・カッターマット
・ハサミ
・定規(30cm金属製推奨)
・+ドライバー
パーツ型紙はこちらからダウンロードしてください。

本体制作編
まず、ダンボールにパーツ型紙を貼り付け、黒線は切断、黒塗りを切り抜き、灰色の線は完全に切らない程度に切れ込みを入れます。(パーツ型紙2枚分のパーツが必要です)


すべてのパーツを切り抜いたら各パーツを組み立てます。
あらかじめ4つのサーボモータに1から4の番号を振っておくとわかりやすいです。

足編
①のパーツと②のパーツを先程入れた切り込み部分を折り曲げて組み立て、その後、①の切り抜かれた穴に②を入れ込みます。(この際②の底面に両面テープを貼るとよいです)
③のパーツにホーン1を差し込み、その下に④のパーツを入れ、セロテープで固定します。

③+④を組み立てた②に入れセロテープで固定します。
その後、③+④のパーツに取り付けたホーンのねじ穴に合わせ+ドライバーで②にも穴をあけます。

太もも編
ホーン2の両端を⑤、⑥に差し込み、サーボモータ1との接地面が上になるように⑦のパーツと接着します。
ホーン2のねじ穴に合わせ⑦に穴をあけます。

次に、⑧の切り抜いた穴にホーン2の固定部分を差し込み、⑤+⑥+⑦と⑧をセロハンテープで固定します。その後、取り付けられたホーンのねじ穴とサーボモータを結合させ、ねじでとめます。

⑧にサーボモータ2を画像のように両面テープで結合してから⑧を組み立てます。

組みあがった⑧のサーボモータ2と足編で作ったパーツのホーンのねじ穴で結合し、ねじで止めます。

右足が完成しました!
左足は右足と対称となるよう、①の向きに注意しながら同じ工程で作成しましょう。(左足では右足のサーボモータ1の位置にサーボモータ3、サーボモータ2の位置にサーボモータ4を使います)
腰編
腰のパーツは全部で6枚です。
⑨、⑩、⑪のパーツを2枚ずつ使用します。
それぞれのパーツを向きをそろえて下から⑩⑩⑪⑨⑨⑪の順番で重ね合わせ固定します。

腰が完成しました!
完成編
左右の足に取り付けたサーボモータ1,3を腰の側面にあるくぼみに差し込みます。

ココロキット+を腰の上に乗せ、両面テープで固定します。その際、スイッチが後ろになるように乗せましょう。その後、それぞれのサーボモータを同じ番号にあわせてココロキット+と接続します。
サーボモータの配線がココロキット+の正しい位置につながっているか注意しましょう。右足ももが1番、右足首が2番、左足ももが3番、左足首が4番になっていると正解です。
二足歩行ロボット本体が完成!

プログラム編
初期設定
まずはじめに「モータがどの角度の時に足がまっすぐ向いているのか」を確認しましょう。
今回は、kurikitのビジュアルプログラミングを使用します。
https://kurikit.ux-xu.com/play/
取り付け方によって70度や85度だったりするので注意が必要です。

また、動作確認の最中に姿勢を戻したくなることも多いので、上の画像のように作っておくと便利です。
前後に歩かせてみよう
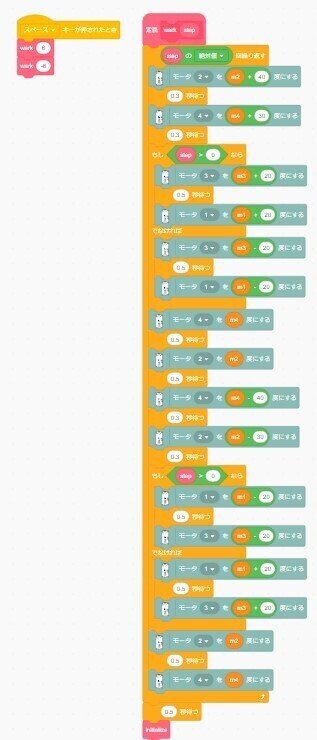
このプログラムでは、初めに6歩前進し、そのあとに6歩戻るような動き方をします。
左上の小さなブロックの数字を変えることで進む歩数が変わります。
動き方自体は「片足立ちで体を傾けて、軸足の付け根を回転させる」という動作を繰り返すことで前後に移動するようになっています。
足の形や幅、大きさなどを変更してどんな足なら歩けて、どんな足だと歩けないかなどを調べると面白いかもしれませんね。
上にかぶせるものも工夫して自分だけの二足歩行ロボットを作ってみてください!
今回の作例は、ダンボールを使ってお家でも作れる簡易版となっています。
以前、投稿された3Dプリンターを使用した作例と記事もぜひご覧ください!

この記事が気に入ったらサポートをしてみませんか?