地上写真測量で面管理をしてみちゃう!?〜計画と実践編〜

こんにちは!内野です。
前回に引き続き地上写真測量について書いてきます。
前回の記事はこちら!
前回は計測前の地上画素寸法について、でした。
正直な気持ちとしては「精度が出りゃいいんだよ!精度が!」
と、思ってますがいざ合わないときは困るのでやっぱりそれなりに知っておいたほうが良いと思います。
また後述しますが、計測計画はそれなりに書かなければいけないので、役に立つかもしれません。
さて!今回はより実践的な内容で書いていきたいと思います。
使用する機器は?
今回の地上写真測量はSfM処理をしなければいけないことから、使用するソフトウェアは限られてきます。
皆さんいろいろとあると思いますが、金本組では
・Pix4D Matic
・Pix4DCloud
・Pix4DCatch
・viDoc(これはハード)
を使って計測します。
ARマーカーも使用することもできます。
さらに、検証点をより分かりやすくするために対空標識も使用します。

撮り方いろいろ!
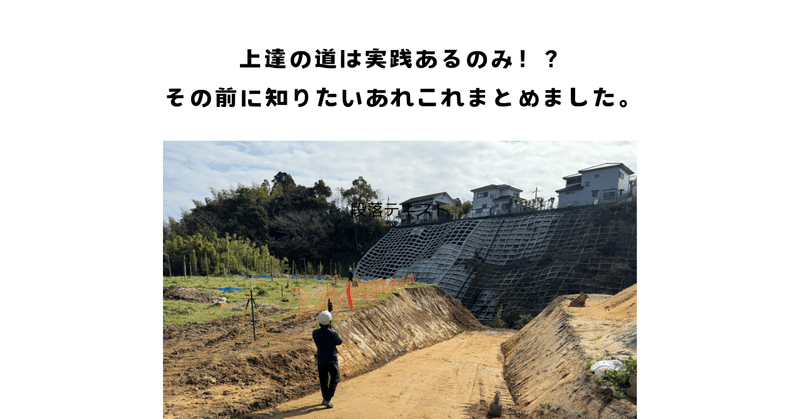
では、今回の現場を紹介します。
護岸を作るための仮設道です。掘削しているため、傾斜・高さそれなりにある状態です。

皆さんならどのような経路で取得していきますか?
撮り方
①.上から下へ波を打つように撮る
②.下から上へ片側法面から順に撮る
③.上から下へ片側法面から順に撮る

どの程度の枚数を取得し、完成させますか?
A.2000枚〜2500枚
B.1000枚〜1500枚
C.500~600枚
ある一定の答えはあるので後ほど紹介します!
その前に、BADな撮り方を紹介します。
実はNG!LiDAR風な撮り方
僕が初めてvidocを使って写真測量をしたときはモバイルスキャン協会の教科書通りに撮ろうとしていました。
しかーし!これではあまりにも写真数が多くなり処理が大変になります。
忘れてはならないのは、今回は“地上写真測量”です。
LiDARではない、ということに注意しなければいけません。
これはとっても重要です。
あまりにもLiDARに慣れすぎて、思わず近接して撮りがちですが、離れていてもOKです!
同じ角度はは2度撮り禁止!(なるだけ)
これはLiDARスキャンと同じですが、同じ角度・場所から2度写真を撮らないほうが精度がよく出るようです。
でも、ラップ率を考えたりすると撮らないわけにはいかないので、この関係性に絶対的な自信があるか、と言われるとそうではありません。
どの撮り方がいいの?
今回の実験に関したことでいえば、
組み合わせとして
②+C
が答えになります。
実はこの実験はPix4Dの中の方にも同席してもらい、さまざまな撮り方を検証したのです。
その中で、最も精度が出た方法がこの組み合わせです。
モバイルスキャン検証はこちらから!(沖山さんありがとうございます。)
②の撮り方の補足
下から上に上がる方法(対象物が写真いっぱいに写る方法)は対象物が常に写っているため処理しやすくなるようです。
他方、上から下へ撮る方法は、画面に対象物以外の物が多く写ることになりがちで、処理しにくいようです。
※現場環境によって大きく変わると思います。撮り方によっても変わると思いますので、参考としてみて下さい。
さらに撮り方は、姿勢の良い歩きスマホと同じ角度で対象物に対して対象物と水平に進むように撮ると良さそうです。

※姿勢の良い歩きスマホはこのイメージです。
Cの枚数の補足
前述の通り、枚数が多くなればそれだけ処理量が多くなります。
また、ダブる部分も多くなり精度が悪くなることもあるようです。
正直、ダブる部分に関しては影響ないのでは?と思うのですが、どうやらそのようなので信じるほかありません。
ただ、DUCKBILLさんの貴重でありがたい資料を拝見すると
「撮りすぎより、撮り漏れがよくない」と記載があります。
※カメラの選定などありますので、ぜひご一読を
後処理ソフトに直接写真を入れれば不要な画像は削除することは可能なので、撮りすぎより、撮り漏れを恐れるほうが良いと思います。
それにしても、カメラワークが美しいです。とっても参考になります。
結論、後処理ソフト(Pix4DMaticなど)に直接入れるわけではない場合には処理料とお金の兼ね合いを考えたほうがよさそうです。
使用するソフトウェアは?
SfM処理ソフトで、座標を紐づけることができ、ジオイドを考慮した処理ができるのはPix4DMaticかなぁ〜と思っていたので、今回はMaticを使っています。
さらにMaticの良いところは、LiDARで取得した点群と合成することができるところです。
このオプションは、高密度点群と深度点群を融合し、それぞれの入力の強みを活かして、より良い点群を生成することができます。 PIX4Dmaticは、モバイル端末特有のGPSやIMUのドリフトによって位置がずれるLiDARデータに対して、高密度点群生成時の位置・姿勢データをより正確に取り込み、適用することが可能です。 正確な位置と向きを持つLiDARデータにより、PIX4Dmaticは均質で質感の低いエリアのギャップを埋め、より密度の高い点群データを作成することができます。
Pix4DCloudで処理することもできますが、より正確な位置を出すためにMaticに写真をインポートして処理をします。
このほうがより厳密な位置付けをすることができ、良い結果が出ました。

検証点はいくつ必要なの?
これは要領に明記されています。
videocのようにRTKで取得できる場合には検証点は2つ
それ以外の場合には表定点を外周につける

その他気をつけることは?
今回の要領で気になったのは
・計画を割と細かく作らないといけないこと
※撮影枚数や側線数など
・撮影コースの初めと終わりの撮影区域外を1モデル以上設定すること
この2つです。

冒頭の言葉や前回の投稿に戻りますが、精度が出ればいい、と思うものの計画でこのように書かなければいけません。
それなりに根拠を準備しないと、です。
さらに、撮影区域外を撮りましょうというところも忘れがちです。
今回のように、高さがある場所だと、どうしてもいくつかのプロジェクトに分けなければいけないこともあると思います。
こういったところを計画に落とし込みたいです。
まとめ
地上写真測量の要領ができました。
先日はReality Captureが条件付きの無料となるなどフォトグラメトリが身近になってきました。
なんでもそうですが、スキャン修行を重ねて、より生産性の高い計画を作ることができるといいですね!
次は最終編となる、viDoc(RTK)のあれこれと気になる設定方法について解説していきます。