
産業用モバイルスキャンの実証実験

初めに
実証実験の目的
1)産業用モバイルスキャンは複数の製品サービスが存在するが、どのような差があるのか検証する。
2)TLSやUAVなどの高価な機材で取得したデータと比較して、計測データに較差が生じるのか検証する。
現状の基準について
建設・土木業界では現在(R5.3.21時点)国土交通省よりICTの全面的な活用を目的とした様々な基準が制定されており、その中で「3次元計測技術と用いた出来形管理要領(案)令和5年3月版」では第14編 土工(1,000m3 未満)・床掘工・小規模土工・法面整形工編にて【(※1)第9章 モバイル端末を用いた3次元計測技術(多点計測技術)の適用】が定められている。
モバイル端末とは
一般的にモバイル端末とは「小型あるいは薄型軽量で簡単に持ち運ぶことができ、電源コードを繋がなくても一定時間使用できる情報機器」と定義されていますが本記事内ではスマートフォンまたはタブレット端末とする。
産業用モバイルとは
主に(※1)において使用する事を目的として開発されているモバイル端末とします。現在の日本国内において複数の製品サービスが確認されていますが、例えば以下のような特徴点がある。
産業用モバイルスキャンの特徴
・専用の標定点を使用しソフト側で位置情報を読み込んで精度管理を行う。
・RTK-GNSSで標定点の位置情報をJGD2011(世界測地系2011)にて付与する。(TSにて標定点座標を計測する必要がある場合もある)
・モバイル端末本体とRTK-GNSSをBluetoothで接続しモバイル端末で取得したデータ自体に位置情報を付与する。
・データの取得方法は主にLiDARによるものとフォトグラメトリがある。
実証実験の内容
概要
2024年2月28日(水)に以下のとおり実証実験を行った。
1)場所:宮崎県宮崎市の某河川工事現場内
2)参加者:CRAFTCOM株式会社・株式会社金本組様・他複数社様
3)データ取得対象:河川工事における土工(掘削)の仕上げ面でかつ法面及び平場を対象とする。

データ取得にあたって
以下の複数の3次元計測技術を用いて同一の対象部位を計測し、結果を点群データで解析した。なお、産業用モバイルの技術名(製品名)については承諾を得ていないものは非公表とする。
今回の実証実験は各技術の差分を把握することが目的であること、また計測方法や計測担当者の熟練度によっても取得するデータにはバラツキが生じる事は多々発生する。
そのため今回の実証実験が全ての計測条件及びロケーションにおいて同一とは言えないことを十分に理解しておく必要がある。
計測技術一覧
1)地上レーザースキャナー
使用機材:ニコン・トリンブル社製 SX12
データ解析:trimbleBusinessCenter
2)UAV空中写真測量
使用機材:DJI社製 Mavic3Enterprise
データ解析:Pix4Dmatic
3)モバイルスキャン①
使用機材:pix4D社製 Pix4DcatchRTK(iPhone14Pro)
データ解析:Pix4Dmatic及びPix4DCloud
4)モバイルスキャン②
A社(非公表)iPadPro+LiDAR+専用マーカー(TSにて座標付与)
5)モバイルスキャン③
B社(非公表)iPhone13pro+LiDAR+専用GNSSローバー
モバイルスキャン計測方法
モバイルスキャンの計測方法としては端末を測定者が手に持ち、徒歩で進みながら対象箇所を撮影しておく。今回の計測対象は縦断方向に勾配があり切土法面も対象にすることから、主に以下の方法で計測した。



この基本形をベースに各スキャンの標定点設置要領に準拠し、計測を行った。
比較の前提条件
1)事前にTS(トータルステーション)で標定点を現地に設置して同一条件で使用する。
2)モバイルスキャンは各製品毎に様々な特徴があり計測にあたっては習熟度が要求される。そのため取得データに差が生じないように計測は各種とも一度で行う。
3)取得したデータは点群のクリーニング・フィルタリングを行わず使用する。また計測中は計測者以外は立入らないこととする。
4)点群データに変換するまでのデータ処理は各ソフトで行い、点群データ化した後に福井コンピューター社製TRENDPOINTVer.11で解析する。
計測データ
1)地上レーザースキャナー(SX12)による取得データ
地上レーザースキャナー(SX12)により取得した点群データは以下の通りである。


またSX12で取得した点群データと3次元設計データを重畳し出来形評価をしたデータは以下の通りである。なお、現地の状況で岩掘削となり当初の設計より形状が変更しているため、若干の差異が生じている。

2)UAV(Mavic3Enterprise)による計測データ
UAV(Mavic3Enterprise)で取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。

SX12で取得した点群データとUAVで取得した点群データを差分解析(点群)した結果は以下の通りである。
黄色の着色部は誤差0.000mに近く、点群データが無い部分(灰色)箇所付近においては赤色が見受けられるが、今回の対象箇所においてはしっかりとマージする事が確認できた。

今回の計測対象箇所のみの点群データを切り出し同じく比較したところ以下のような結果を得た。
・点群差分結果【TLS(SX12)とUAV(M3E)で取得した点群比較】
有効な点数578,213点
最大値0.021m
最小値0.000m
平均値0.000m
標準偏差(σ)0.0005m


また任意の箇所において断面を比較してみると以下の通り差分は見受けられなかった。


3)Pix4DcatchRTKによる計測データ
Pix4DcatchRTKで取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。
Pix4DcatchRTKの計測方法はいくつかのやり方があるが、今回は複数の標定点を付与したうえでPix4Dmaticにて解析処理した。
取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。

Pix4DcatchRTKRTKで取得した点群データとTLS(SX12)で取得した点群データを差分解析(点群)した結果は以下の通りである。
今回の計測対象箇所のみの点群データを切り出し比較したところ以下のような結果を得た。
・点群差分結果【TLS(SX12)とPix4DcatchRTKで取得した点群比較】
有効な点数4,356,140点
最大値0.020m
最小値0.000m
平均値0.000m
標準偏差(σ)0.0002m


また同一の任意の箇所で断面を切り出し差分を確認したところ、差分はなくしっかりとマージする事が確認出来た。
ただし法面の小段平場において一部点群データが欠落していることが確認出来る。これは取得の方法として最下部を歩いたことから発生いた欠損部となる。また床掘りの最下部において、入射角の関係から一部点群データの密度が薄くなっている箇所があった。これは計測の熟練度で解消できると考える。

地上レーザースキャナー(SX12)で取得した点群データを基準としたときに、UAV(Mavic3Enterprise)にて取得した点群データよりPix4DCatchRTKで取得し標定点を与えPix4Dmaticにて解析処理した点群データの方がより精度が高いことが確認出来た。
4)モバイルスキャン②A社 iPadPro+LiDAR+専用マーカー(TSにて座標付与)
モバイルスキャン②で取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。
予め複数の標定点をセットしTSで座標を与えて専用のアプリにて読み込んで解析したデータとなる。
取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。
特徴としてはLiDARを使用して計測しているため、Pix4DCatchRTKと違い測定する距離(5m)はLiDARに依存する部分である。

モバイルスキャン②(LiDAR)で取得した点群データとTLS(SX12)で取得した点群データを差分解析(点群)した結果は以下の通りである。
今回の計測対象箇所のみの点群データを切り出し比較したところ以下のような結果を得た。
・点群差分結果【TLS(SX12)とモバイルスキャン②LiDARで取得した点群比較】
有効な点数3,889,795点
最大値0.100m
最小値0.000m
平均値0.005m
標準偏差(σ)0.0095m


モバイルスキャン②LiDARで取得した点群データは、UAV並びにPix4DCatchRTKで取得した点群データと比較して若干の較差とバラツキが見受けられた。
比較しやすくするためモバイルスキャン②で取得したデータをRGBでなく単色(赤色)表示すると以下のようになる。

また任意の箇所で断面を切り出し差分を確認してみると、以下のような特徴点が見受けられた。
・計測データはLiDARのレンジ(5M)に準拠するため高低差がある法面部分の上部において、点群データが取得出来ない。
・計測部分が重なると点群が二重になる。
※RGB表示は地上レーザースキャナーにより取得した点群データ、単色(赤色)表示はモバイルスキャン②LiDARにより取得した点群データ

切り出した断面を拡大表示してみると取得したデータの較差と二重になっている部分が確認出来る。これはLiDARの性質上よく見受けられる状態で、同一箇所を極力スキャンしない、一筆書きで計測するなどの熟練度が必要である。

また地上レーザースキャナーで取得した点群データと比較して、低い箇所で4~5cm程度の較差と高い箇所で6~7cm程度の較差が見受けられた。

5)モバイルスキャン③B社 iphone13pro+LiDAR+専用GNSSローバー
モバイルスキャン③で取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。
専用のGNSSローバーを定められた間隔で標定点として使用し、専用のアプリにて読み込んで解析したデータとなる。
取得した点群データは以下の通りである。このデータをSX12で取得した点群データと重畳し比較する。
特徴としては前述のモバイルスキャン②と同じくLiDAR計測であると言うことと、標定点はGNSSローバーを使用するためRTK-GNSSの性質を良く理解しておく事が必要となる部分である。

取得した点群データを確認すると一部の部分で密度が不足している事が確認出来るが、これは計測方法の習熟度によるものと考えた。
モバイルスキャン③(LiDAR)で取得した点群データとTLS(SX12)で取得した点群データを差分解析(点群)した結果は以下の通りである。
今回の計測対象箇所のみの点群データを切り出し比較したところ以下のような結果を得た。
・点群差分結果【TLS(SX12)とモバイルスキャン②LiDARで取得した点群比較】
有効な点数28,418,058点
最大値0.249m
最小値0.000m
平均値0.028m
標準偏差(σ)0.0278m
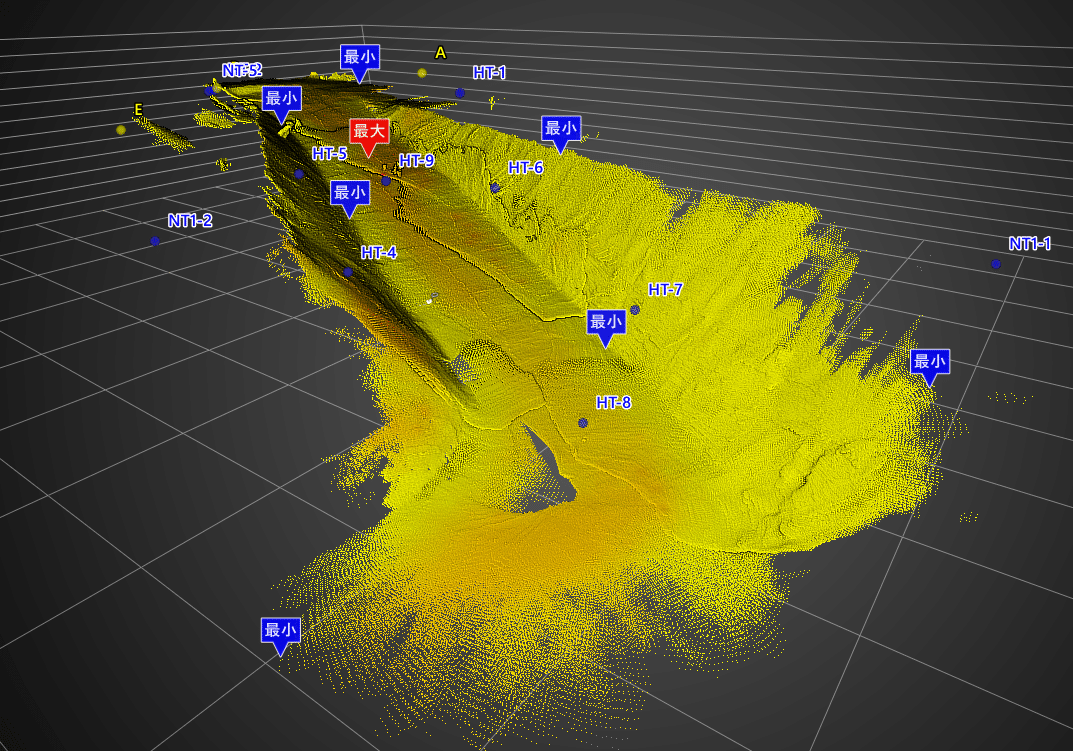

モバイルスキャン③LiDAR+GNSSローバーで取得した点群データは、UAV並びにPix4DCatchRTKで取得した点群データと比較して較差とバラツキが見受けられた。
比較しやすくするためモバイルスキャン②で取得したデータをRGBでなく単色(緑色)表示すると以下のようになる。
地上レーザースキャナーで計測した点群データと比較して高めに計測されていることが確認出来る。

また任意の箇所で断面を切り出し差分を確認してみると、以下のような特徴点が見受けられた。
・計測データはLiDARのレンジ(5M)に準拠するため高低差がある法面部分の平場(小段)において、点群データが取得出来ない。
・計測部分が重なると点群が二重になる。
・標定点を設置して座標変換する方法に比べてRTK-GNSSで計測するため、RTK-GNSSの精度に比例して較差が生じる場合がある。
※RGB表示は地上レーザースキャナーにより取得した点群データ、単色(緑色)表示はモバイルスキャン③LiDARにより取得した点群データ

切り出した断面を拡大表示してみると取得したデータの較差と二重になっている部分が確認出来る。これはLiDARの性質上よく見受けられる状態で、同一箇所を極力スキャンしない、一筆書きで計測するなどの熟練度が必要である。
また地上レーザースキャナーで取得した点群データと比較して、低い箇所で7~9cm程度の較差と高い箇所(二重線の上)で20~25cm程度の較差が見受けられた。

まとめ
精度検証結果
地上レーザースキャナー(SX12)で計測したデータを基準値としたときに、今回の実証実験で得られた計測データを精度だけで評価すると以下のようになる。
1)pix4DCatchRTK+pix4Dmatic
↓
2)UAV(Mavic3Enterprise)
↓
3)モバイルスキャン②iPadPro+LiDAR+専用マーカー(TSにて座標付与)
↓
4)モバイルスキャン③iphone13pro+LiDAR+専用GNSSローバー
総合評価
総合的に評価を行うにあたり、以下の注意点を加味しモバイルスキャンのみを対象とする事とした。
・地上レーザースキャナー並びにUAVと、モバイルスキャンを同列に評価すること自体に意味を持たない。そもそも価格帯や目的とする計測の範囲広さなどに大きな乖離がある。
・広域の場合、モバイルスキャンよりUAVやTLSがより有利になる。
・総合評価は今回の実証実験現場による計測の結果とし他の条件であれば違った評価になりうる。
・価格については参考とする。

編集後記
今回は令和5年2月の末に株式会社金本組様のご協力により大変有意義な実証実験が宮崎県で行えました。
産業用モバイルスキャンは現在複数の製品サービスが開発されておりますが、横断的に比較検証したデータなどを入手することは困難です。
また現在は、地上レーザースキャナーやUAV空中写真測量や空中レーザー測量などが主流ですが導入にあたっては高価な機材であることや専門的な知識を有する人材が必要との問題もあり中々苦労している企業様も多いと思います。
モバイルスキャンは無料のアプリなども日進月歩で開発が進み、Gaussian Splatting技術を使用した無料3Dアプリがリリースされるなど、近い将来の商業利用もますます加速するのでは無いかと考えております。
現在は使用出来る場面・現場も限定的ではありますが、モバイルツールは近い将来の「メジャー・コンベックス」であり「より簡単に誰でも使える道具」となると思います。
今回の実証実験データが皆様のお役に立てれば幸甚です。