[ロボ実験記録] ロボットとAIに操作させたい化学操作と、必要な機構・技術のメモ

概要
ロボットに化学実験をさせる際の細かな要素技術(→今後行いたいこと)に関するメモを、頭の整理を兼ねて作りました(23年8月ver)。
あとは作るだけ、というフェーズに入りつつあります。
マンパワーが不足しています。
参考
計量
秤量
こちらの天秤はUSBでのシリアル通信に対応しているので、秤量値の記録に使えそうです。
液体の添加
マイクロピペット(電動制御)
pipettyによるusb通信には成功しました。
この記事では、ロボットアームにピペットを装着して使用しています。
実験系がピペッティングだけで完結するなら、これでOKです。
ただ、サンプル瓶を移動したいなどの要望が出てくると、ピペット一本でアームを占領するのが、ややもったいなく感じられます。
ピペットは固定して、サンプル瓶側をアームで移動するシステムの方が、総合的にはスマートかもしれません。
ピペットのチップを外すための機構(モーターx1)も作りたいです。
マイクロピペット(通常型)
電動制御のピペットは値段が少し高いので、普通のマイクロピペットを使うための機構(モーター+表示認識)もいつかは試したいです。
ピペットを押す + 容量変更用の2つのモーターで原理的には制御可能です。
(ピペットの押し具合をサーボモーターで制御する機構なら、モーターは1つでOK。ただし精度にやや不安)
フロー
有機合成系でよく見かける、フロー合成装置。不活性条件で試薬を入れる機構としては優秀
シリンジ
不活性条件での実験操作には針を使った機構も選択肢として有り。
制御機構を作るのは、かなり大変そうです。
人に刺さると危ないので、安全配慮の重要性も高まります
固体の添加
固体は液体よりも難易度が上がります。
人間は普通、薬さじを使って粉体を秤量しますが、これはロボットには色々な意味で難しいです。
DENSOのCOBOTTAの動画を見ると、チャレンジングさが伝わってきます。
ではどうするかというと、専用の粉体を落とす機構を実装するケースが多いようです。以下はNatureで話題になったロボット化学者の動画。

これは比較的、低コストで作れそうです(モーターx1 + 専用の容器を3Dプリンタなどで作成)。
→ 電動のペッパーミルを改造してみる予定です。
ベタベタした粘性固体の秤量は、諦めた方が良いレベルだと思います。溶媒に溶かして使うのが良さそうです。
運搬
サンプル瓶の運搬
サンプル瓶をどのように掴むかは、重要な課題です。
危険な薬品が入った瓶を落とすと一大事なので、高い信頼性が求められます。
いくつかの主要なアプローチについて記載します。いずれにせよ、何らかの専用の設計が必要になりそうです。
グリッパの使用
Natureのロボット化学者でも使用されていました
瓶のくびれの部分を掴む仕様です
よく見ると、グリッパ部分が、瓶の形にフィットするように凹んだ加工になっていました
必要な設計
通常のグリッパ(平らな平面)だと、瓶に対して2点接触となり、極めて不安定
次のような、何らかの対応策が必要
グリッパの表面にゴムなどをつける (柔らかくて摩擦のあるもの)
グリッパ部分を瓶の形状に合わせて加工する
瓶のホルダーを作り、グリッパが持ちやすい形状を追加する
瓶を加熱したりする際はホルダーの安定性に課題
吸引装置を使う
システム面では難易度が低下
吸引面が必要
蓋やホルダ
吸引力や、吸引面の汚れ対策は必要
電磁石を使う
吸引よりは信頼性が高そうです
磁石にくっつく面が必要
dobot magicianの吸引カップの動画。下手にグリッパ使うよりも、強度が出そうです。
1 kgくらいは持てるようです。むしろ、本体がふらつくレベル。
自走ロボット
ロボットアームを載せて走るマシン。Mycobotなら15万円弱で導入可能。
こちらも自己位置推定などが必要になりますが、全く着手できていません。
反応・計測
ホットプレート
こちらのデバイスをシリアル通信で制御する予定です。
通信機能のないホットプレートを、ボタン経由で制御もしてみたいところです。
計測
各種、計測装置との連動。
合成時に必要な精製操作なども、専用のモジュールを組み上げて対応するのがベターな気がしています。
制御
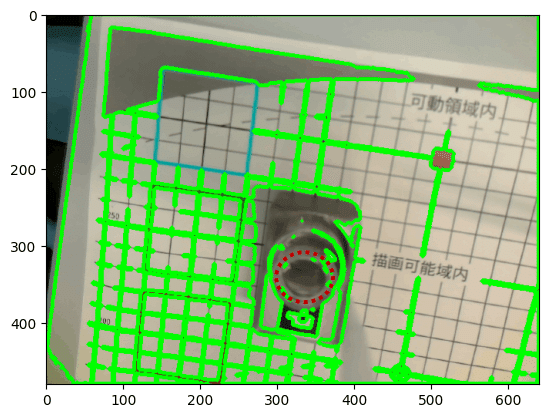
ピペットの先端制御
大まかな座標推定は、ARマーカーを使えばOKです。
ただ、ミリメートルレベルのコントロールをするには、専用のアルゴリズムを実装する必要がありそうです。
ピペットの先端とサンプル瓶の丸い輪郭を認識させた上で、先端が容器内に入るようなコードを書く必要があります。
物体認識と把持
物体を点群として認識し、グリッパーで把持するアルゴリズム。ロボットアーム界では定番ですが、全く着手できていません。
ボタンを押す、ダイヤルを回す、ドアを開閉する etc
通信機能がない装置のボタンを押す、ダイヤルを回す、ドアを開け閉めする、など。
手動制御
ロボットではなく、人間の手で制御するフェーズがあっても良いと思っています。いわゆるリモート実験です。
リアルタイム制御は、ロボットや処理系の遅延なども考慮する必要があり、意外と簡単ではないことが分かってきました。
ゲームコントローラ
化学分野でも、アナログスティックでゲームを遊んだ経験が生きる時代(?)になってきました。
VR
コントローラ自体は数万円で購入可能で便利l。
ただ、コンシューマ品は座標取得が「ゴーグルとアームコントローラの相対位置」によってなされているので、常にゴーグルを付けないといけないのが欠点といえば欠点。
FirstVR
筋電位を認識できるコントローラ
自動制御
最終的には、GPTなんかに全てのタスクを丸投げしたいということになります。そのために必要な要素
様々なインターフェースの統合
装置によって、シリアル通信やら、LAN通信やら、仕様がまちまちです。
このあたりを包括的に管理・処理するシステムが必要になってきます。
やはり、ROS2でしょうか。着手できていません。
プログラミング化
一連の機能をモジュール化し、APIで呼び出せるようになれば、実験内容をプログラムコードとして管理できるようになるはずです。
ここまでくれば、あとはGPTなどの大規模言語モデルに、プログラムコードを出力させるだけでOK、ということになります。
まとめ
ロボットとAIを使って化学実験をさせるための要素技術について、整理してみました。
方向性はだいぶ見えてきたので、引き続き、手を動かして知見を増やしていこうと思います。
この記事が気に入ったらサポートをしてみませんか?