ダイセン電子工業仕様・XHコネクタArduino互換基板の製作

はじめに
ロボットプログラミングキットTJ3やTJ3B-Coreを卒業し、Arduinoを使って
"C言語" で開発しようと考えるロボカッパーは少なくありません。
既に購入済みのダイセン製のセンサを使う事を前提に、ダイセン電子工業 仕様の3P(汎用ポート)、4P(I2Cポート)を搭載したArduino互換基板の製作を行います。
TJ3は乾電池3本もしくは単3型Ni-MH3本で動作します。
Arduinoを使う場合は電源を別途準備する必要があります。
この際、入手し易い模型用のバッテリーを使う事になるのですが、経験上模型用バッテリーの安全な取り扱いについて熟知した上で使っている事は殆どありません。(模型用バッテリーについてはこちら ↓ を御参照下さい)
模型用Li-Poバッテリーを用いたロボット製作は危険です!|あるちざんラボ (note.com)
これを踏まえて、過充電・過放電・過電圧・過電流防止機能・短絡保護機能・温度検知機能の6つの保護機能搭載を搭載し、ロボカップジュニアのロボット製作に使いやすいサイズのモバイルバッテリー
薄型コンパクトモバイルバッテリー(5000mAh/2.4A/Cx1+Ax1) - DE-C37-5000WH (elecom.co.jp)
(¥1,700程で購入しました)を軸にArduino互換ロボットプログラミングシステムを構築します。
模型用バッテリーの場合、"充電器+3~5本のバッテリー"の購入が一般的ですが、この方式では、お手持ちのUSB電源にて充電できますので、充電器の購入費用が不要です。
5000mAhは1日充分稼働できる容量ですので、マメに継ぎ足し充電すれば予備を購入する必要はなく、とてもリーズナブルです。
モバイルバッテリーの最大供給電流は2.4Aですので、120:1もしくは200:1のギヤ比の高い、ギヤードモーターを使うことを推奨します。
200:1プラスチック製ギアモータ90度シャフト - RobotShop
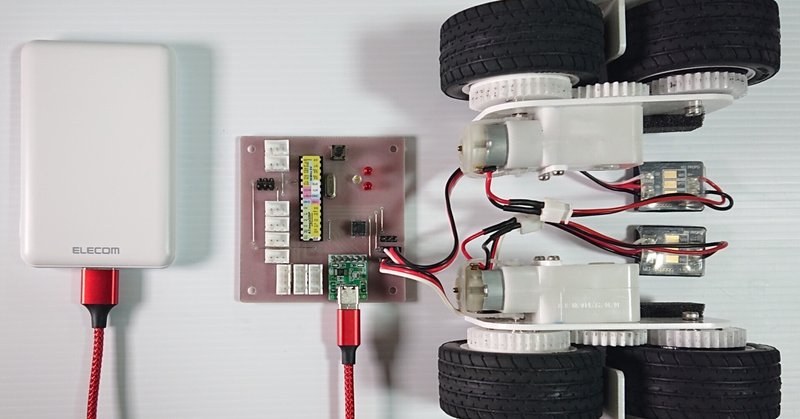
全体構成
電流 2.4A を取り扱える USB Type-C型コネクタ を備える USB-シリアル変換ボード を用いて電源供給します。
これによって、レスキューチャレンジで重要な電源電圧の安定性が確保できます。
これに、4Aを超えると電流リミットが作動するMD-1(ニュートラルブレーキ仕様)を用いることで配線の焼損などの事故を防止します。
MD-1(ニュートラルブレーキ仕様) | 近藤科学 (kondo-robot.com)

基板仕様
ダイセン電子工業仕様の3P × 6( A0~A3、9、10 )、4P ×3( I2Cポート )、近藤科学製KRS-3000シリーズ・シリアルサーボ、MD-1( ニュートラルブレーキ仕様 ) 用3P ×3( 2、3、4 )、ArduinoISC 6P × 1、LED × 3、スタートスイッチ、リセットスイッチ搭載。


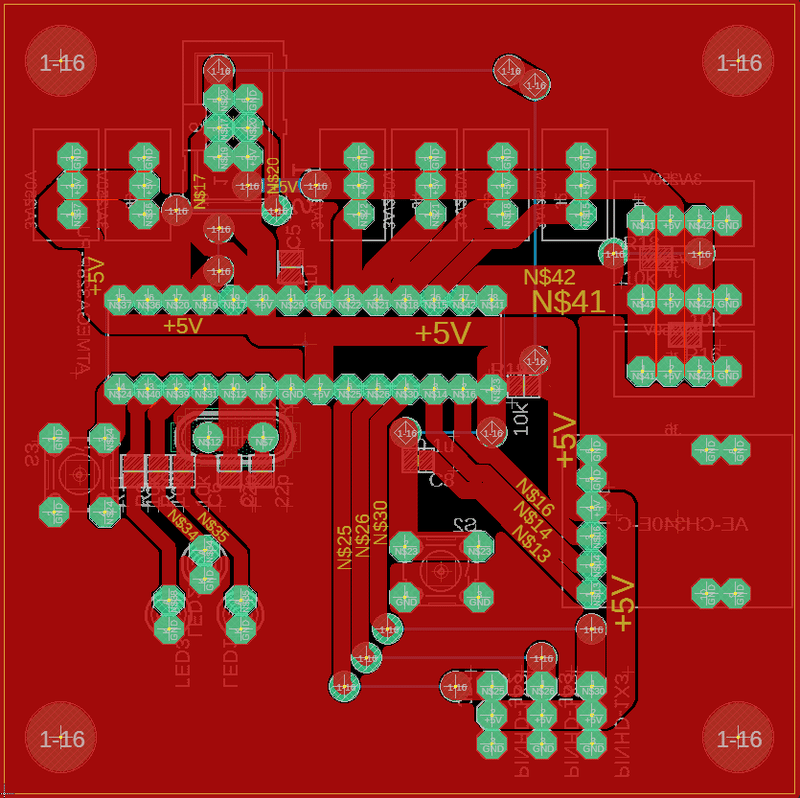

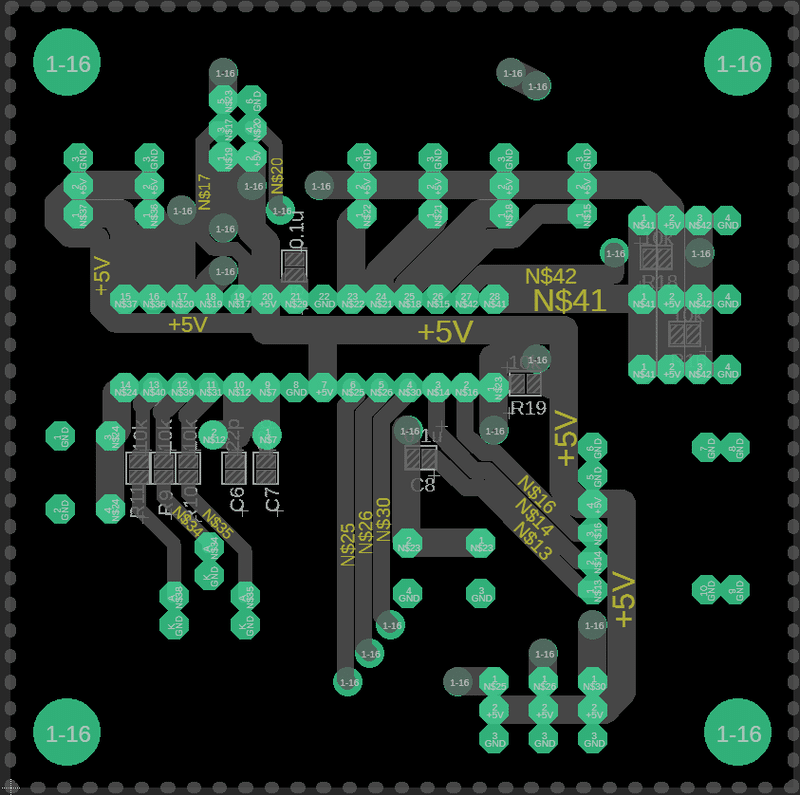

レーザー加工にて基板を製作する事を前提に、この ↓ 手法にて設計したデータです。
レーザー加工機を用いたプリント基板の作り方、概要|あるちざんラボ (note.com)
レーザー加工機があれば、”ArduinoUNO互換ボードパターン.dxf” のみで基板作成ができます。
※返金不可設定になっておりますので、ご注意ください。
有料部分では、基板作成に必要なデータのダウンロードができます。
部品表 エクセル版には部品のリンクが貼ってあり、注文に便利です。(リンク切りはご容赦下さい)
ArduinoUNO互換ボードBOM.xls
ArduinoUNO互換ボードBOM.pdf
レーザー加工機にてパターン焼きする為のデータ
ArduinoUNO互換ボードパターン.dxf
Eagle 9.6.2 の回路図・パターン図データ
ATmega328P.sch
ATmega328P.brd
ここから先は
¥ 100
いつもサポートありがとうございます!いただいたサポートは新しい記事の糧となります。 製作記事は部品購入が必要ですので大変助かります!