
技術指導におけるエコロジカルダイナミクス

どっかで話すことになる内容のアイデアとそのメモ書き兼まとめ。
内容の統一性はあんまり無いです。エッセイみたいな感じで読んだ方が良いかも。シランケド
イントロ
「庭師」としての指導者
I began to view effective leadership in the new environment as more akin to gardening than chess.
……Within our Task Force, as in a garden, the outcome was less dependent on the initial planting than on consistent maintenance. Watering, weeding, and protecting plants from rabbits and disease are essential for success. The gardener cannot actually “grow” tomatoes, squash, or beans—she can only foster an environment in which the plants do so.
(新たな環境での効果的なリーダーシップは、チェスよりも園芸に近いと考えるようになった。
……タスクフォースの中においては、一貫したメンテナンスほど初期のプランニングがその結果に影響することはなかった。水やりや草むしりをして、ウサギや病気などから植物を守ることが、成功にとって重要な要素であった。
庭師は実際にトマトやカボチャ、豆を「育てる」ことは出来ない——ただ植物がそうなるような環境を育むことが出来るだけだ。)
※邦訳版あり
これはアメリカの軍人であるStanley Mcrystalのリーダーシップ論に関する言葉だが、しばしばスポーツ指導者に対する警句としても用いられる。
これと同様の指摘をトレーニング指導者であるFrans Boschもしている点はとても興味深い。
……コーチたちは指揮者というよりも庭師になるべきということである。……コーチの仕事は環境的に有効な練習状況を設定することへと変化しており、この環境は運動の正しい解決法の発見の手助けになり、学習者はバイオメカニクス的に適切な解決法を暗黙的に学び認識できるように設定された環境である。
Boschによるこの指摘は、競技におけるコーチングスタッフを含めた運動指導者全てにとって環境とヒトの相互作用、すなわち「エコロジカルダイナミクス」ecological dynamicsの視点が重要になることを示唆している。
エコロジカルダイナミクスとは何か?
エコロジカルダイナミクスは生態心理学ecological psychology、動的システム理論dynamic systems theory、複雑系科学complexity sciencesなどの統合からなるコンセプトとされる(Woods et al., 2020)。
ヒトの身体動作という点におけるエコロジカルダイナミクスを端的に述べれば、ヒトの身体運動を、環境との相互作用の中で自己組織的*に生成される一つの系とみなすコンセプトであると言えるだろう。
*自己組織的=外部からの制御なくシステムの秩序を形成していくさま(詳細は以下も参照されたい)
先のMcrystalの言説は、エコロジカルダイナミクスの視点に立った際に指導者の立場がいかにして転換されるかを示している。
このような転換の次には、以下のような問題が焦点となる。
動作の「獲得」acquisitionはどのようになされるのか?
そもそも、何をもって動作を「獲得」したとするのか?
指導者はどのような指導をしなければならないのか?
ここでは、これらの疑問への解答を導き出す際にヒントとなるであろういくつかのアイデアについて概観していきたい。
前提の話:「動作」と「行為」は何が違うのか
ヒトの身体運動human movementは、それそのものが目的なわけではなく、何らかの意図を達成するためになされる。
例えば同じ「走る」動作であっても、それが誰かから逃げる時と誰かを追いかける時では、その動態は異なってくる。

したがって、同じ動作movementは必ずしも同じ行為actionを引き起こすわけではないことが分かる。
さらに先の例で言えば、同じ追いかけられる役であっても、その焦点は環境のあり方によっても異なる(開けた校庭を逃げ回るのか、遮蔽物の多い公園を逃げ回るのか、等)。
Bernsteinによる運動のレベルの定義および「行為」の概念について
この動作と行為の弁別は、哲学においては古くからなされてきた(すなわち「行為の哲学」theory of action)。
ヒトの身体運動においては、例えばNicholai Bernsteinが明確にその弁別をしていることが注目される(Bernstein, 1996. 以下ページ番号は邦訳版のもの)。
行為のレベル(神経生理学ではこのレベルを、対称的行為のレベル、連鎖行為のレベル、意味ある行為のレベルなどと呼ぶ。後の議論では、これらの用語がまさにぴったりあてまはることが分かるであろう)には、Dという文字が割りあてられているが、先にのべた各レベルとは多くの側面において決定的に異なっている。
……行為のレベル、つまりレベルDに関していえば、状況は一変する。ウマや、イヌや、ゾウといった最高次の哺乳類でされ、やっとレベルDの萌芽が認められる程度にすぎない……このため、レベルDのことを人間のレベルと呼ぶことは誇張でもなんでもなく、全く正当なことだ。
……行為は単なる動作ではない。行為の多くは、ある運動課題を協同して解決する動作系列の全体である。
ベルンシュタインは、ヒトの運動とその制御に関して、先の行為のレベルを含めて4つのレベルに分けている。

これらの詳細な説明およびベルンシュタイン以降の研究の進展がベルンシュタインによる説明にもたらす影響については、ProfetaとTurveyによるレビューがあるため(Profeta & Turvey, 2018)、詳細はそちらを参照されたい。
ここでは動作構築のレベルに関する簡潔な紹介にとどめる。
レベルA: 緊張(トーン)のレベルlevel of tonus
神経系と筋系の間の関係性によって構成される制御機構。
上位中枢からの指令を受けた神経とそれによって賦活・弛緩する効果器(=筋)による制御を指す。レベルB: シナジーのレベルlevel of synergy
中脳や小脳によって作られる制御機構。
複数の筋群を統合的に制御し、運動器の自由度を制御して動きの細部を調整する機構を指す。レベルC: 空間のレベルlevel of space
視覚系や聴覚系といった感覚器およびそれに基づいた効果器の制御を行うレベル。レベルD: 行為のレベルlevel of action
ある課題を解決するためになされる一連の動きを制御・統合するレベル。
ベルンシュタインによれば、運動の制御はレベルCやDといった「先導レベル」がレベルAやBといった「背景レベル」をコントロールすることによって生じると考えられる。
この考え方に基づけば、各セグメントレベル(=単一の筋の運動、関節の動きなど)における動作の意味はより高次のレベルによってのみ定義・規定されるのであって、それ自体は絶対的な意味を持つわけではないということになる。
もう少しわかりやすく言うと、ある一部分の運動やそれに伴う筋の動員は上位中枢およびそこに作用する意図や環境の情報によってのみ規定され、それら上位レベルによるプログラミングに基づいて生じているにすぎない、ということである。
Bernsteinの知見から:「行為」における意識の問題
この理論的な指摘は、単一の動きを繰り返させることや、特定の関節に焦点を向けさせる(すなわち「インターナルフォーカス」internal focusを導く)ようなキューイングをすることの問題点を浮き彫りにするとも考えられる。
※このような内的internal/外的externalなフォーカスという問題についてはGabriele Wulfによる著書が参考になる。
運動学習においてエクスターナルフォーカスがインターナルなそれよりも有効であるとする研究もあるが(Chua et al., 2021)、動作を実践で行う際にも我々は外に注意を向けており、むしろ身体の動かし方自体に下手に意識を向けることでパフォーマンスが落ちることを我々は経験的に理解している。

ベルンシュタインの言葉を借りれば、この現象は本来背景レベルであるセグメントレベルに焦点を向けることによって、運動構築の階層構造における「破壊的な切り換え」が生じるためである。
私たちは、通常、動作の先導レベルが自覚されることを知っている。背景レベルで生じるあらゆるプロセス、あらゆる自動性および補助的な調整は、意識の及ばないところで進行する。このため、背景機構の一つに意識的な注意を固定することはおおむね、その背景レベルを一時的に先導レベルとして扱うことを意味し、これが破壊的な切り換えにつながることになる。
実際、バッティング課題における内的/外的なフォーカスがパフォーマンスに与える影響に関する研究では、熟練者では事前に手の動きに意識を向けるような音声刺激が与えられるとパフォーマンスの低下が生じることが示されている(Castaneda & Gray, 2007)。
また、より実践的に、焦点化のために口頭での指示を用いてクリケットにおけるバッティングパフォーマンスを研究したBull et al. (2022)でも同様に、熟練者においては内的な焦点を向けさせるようなキューイングがパフォーマンスを低下させたとする結果が示されている。
このような事象からは、指導者がいかにしてキューイングを工夫しなければならないかという点に関して大きなヒントを得ることが出来る。
ある選手の技能自体は出来ているのにそれが実践に活きないという段階にある場合、もはや「動作」それ自体に意識を向けさせることに意味はないどころか有害である可能性すらある。
そうではなく、むしろ特定の課題およびそれを遂行する「行為」の結果に意識を向けることが必要になると考えられる。
近年では、「パフォーマーにとって必要な情報はタスクに関連する情報である」という指摘もなされるように(Herrebrøden, 2023)、動作それ自体に対する情報にどの程度意味があるのかは再考される必要がある。
以降見ていくエコロジカルダイナミクスの視点においても、生体内部の運動制御それ自体は重視しないという考え方を採用している。
運動学習と動作指導におけるエコロジカルダイナミクスのコンセプト
基本的な観点:技能の「適応」という考え方
古典的な運動制御理論に基づく運動学習のコンセプトは、我々の「なか」にある何らかのプログラムを形成することに焦点を当てている(Magill & Anderson, 2016)。
例えばスキーマ理論に基づくコンセプトであれば、同じプログラムを通した様々な運動結果を練習する(=パラメータの変更を駆使する)ことでスキーマを形成させることが運動学習の焦点となる(Ibid.)。
この観点は我々に恒常的練習(ひたすら同じように素振りを繰り返すような、変動のない練習)の効果に疑義を打ち立てるという点で有効であるし、生体「内」での運動の制御とその学習を考える上では重要な視点である。
しかし、この問題は運動制御における般化運動プログラム(GMP) の概念における問題点と同様に、全く新しい運動をいかにして生成するのか、そして生体の変化に対する運動の適応(例えば疲労に伴う筋の収縮動態の変化など(Coros et al., 2002))のプロセスを説明することが出来ないとされる。

この歩行パターンの相転移はGMPの理論では説明が出来ない。
一方、動的システム理論およびそれに基づくエコロジカルダイナミクスのコンセプトにおいては、生体内部の運動制御の様相に関しては重視されない(Woods et al., 2020)。むしろここで重視されるのは、パフォーマンスの「機能性」functionalityを保つような、生体と環境の相互的関係性であるとされる。
したがって、エコロジカルダイナミクスの視点において、運動学習とはコンピュータのデバッグ作業のように我々の中に記憶される(と仮定される)概念を修正することではなく、我々の行為に影響を与えうる環境内の情報=アフォーダンスaffordanceを知覚し、それに基づいて技能を「適応」できるようにすることであるとされる。
この意味で、エコロジカルダイナミクスの視点からは技能は「獲得」skill "acquisition"するものというよりもむしろ「適応」adaptationするものとした方が幾分合理的である。
「制約主導の」アプローチとそれに基づく動作指導の理論的枠組みについて
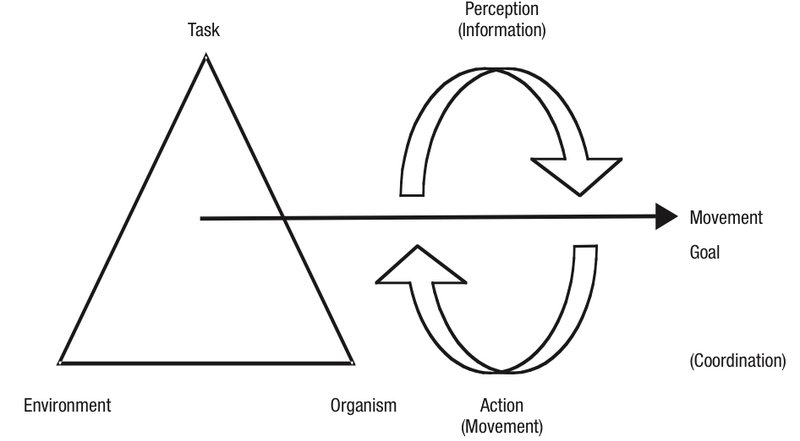
エコロジカルダイナミクスのルーツは、Newellによりモデル化され、現在では「制約主導の」アプローチconstraints-led approach(CLA)と呼ばれるコンセプトにある。
これは、学習者を取り巻く要因を運動の協調・制御の獲得を導く「制約」として考えるコンセプトであり、この要因は次の3つに分けられる(Davids, 2010)。
生体的制約organismic constraints
遺伝子や体格、認知、動機づけ、感情などを含めた個人の特徴環境的制約environmental constraints
周囲の明るさや温度、重力、オーディエンスの存在など課題的制約task constraints
特定のパフォーマンス目標、競技のルール、使用する器具や道具、フィールド環境など
(環境的制約よりも特定のコンテクストに固有な環境的条件も含む)
これらの要因が、目的思考の動作におけるコーディネーションパターンの出現を調整・制約することになると考える。
CLAに基づくキューイング:どのような指示を与えるか?
CLAのコンセプトにもとづく運動学習においては、Kelsoが提唱する「内因性ダイナミクス」intrinsic dynamicsの考え方が重視される(Kelso, 1995)。これはHKBモデル(Haken-Kelso-Bunz model)(関連記事参照のこと)で認められるように、何らかの運動パターンを学ぶ前から我々にコーディネーション傾向が存在すると考えるコンセプトである。
上述したような制約の条件を知覚し、それに適応できるようにコーディネーションパターンを探索・コントロールすることで、タスクの解決がなされる、というのが内因性ダイナミクスとそれに基づくCLAのコンセプトにおける運動パターンの考え方である。
したがって、この考え方に基づけば、我々が技術を指導する際に必要なことは対象に「運動パターンを教える」ことではなく、「付加的な情報や物理的環境の変化を通じて学習者による探索を促進するように試みる」(Newell & Ranganathan, 2010)ことであるといえる。
このプロセスで我々が指示としてどのようなキューイングを行えば良いのか、という問題が生まれる。すなわち、「付加的な情報」として何を与えるべきか、という問題である。
この点について、Newell & Ranganathan(2010)ではそれについて次のように分類を与えている。
①タスクのアウトカムに関する情報
……ゴールの数、ジャンプした高さ、タスクを完了させるまでの時間など
②タスクの動作パターンに関する情報
……課題を達成する上で必要となる身体の動かし方に関する情報
しかし、前者であればそもそも学習者は理解している必要があるし、後者であれば指導者が「正しい」動作パターンを理解している必要がある上にそれが必ずしも学習者にとって最適解では無い可能性があることから、両者はいずれも単独では不完全なものである。
そのうえで、ここでは次のような提言がなされている。
タスクの「コンセプト」(=概形)に関する指示を与えること
学習者が簡単に理解出来るような、動作の特性に関する特徴的な情報を提供する。例えば倒立であれば「肩が手のひらの上にくるように」など。ある程度の精度を持つ学習者に対してであれば、エクスターナルフォーカスに向くような指示を与える
練習のデザインと実際の指導への適用について
「反復なき反復」というコンセプト
練習の本質と目的は、動作を向上させること、すなわち動作を変化させることだ。したがって、正しい練習とはすなわち、反復なき反復である。
……要は、正しく組織化された練習の際には、生徒は、ある運動課題を解決する一つの方法を何度も繰り返しているのではなく、解決のプロセスを繰り返すことによって、解決法を変化させ、改善させているのである。
いかにしてスキルの獲得を促進させるかという点において、ベルンシュタインによる「反復なき反復」repetition without repetitionという考え方は現在主流になりつつある。
これは動作の「柔軟性」を高め、異なるシチュエーションにおいてもエラーを最小化してタスクを達成するために必要なアプローチであると考えられている。
このような動作の柔軟性を高めるためのアプローチの基本原理として、Ranganathan et al. (2020)では「課されたタスクを達成するための複数の動作パターンを直接的に練習する」ということが強調される。
このコンセプトに基づく具体的アプローチに、「非線形教授法」non-linear pedagogy(Chow et al., 2006, 2011, Carvalho et al., 2018)やdifferential learningと呼ばれる練習デザインが存在する。
簡潔に言えば、前者は生体-環境における相互作用に着目して練習における「ノイズ」=変動に重視してメインの課題について制約を課すのに対して、後者はメインの課題を達成する上で複数の異なる動作パターンをサブタスクとしてランダムに配置する、という違いがある。

両者はどこに変動を課すのかという点で微妙に異なるアプローチではあるものの、いずれにせよ重要な点は「正しい動きをすり込ませる」ような練習デザインよりも、「異なるシチュエーションにおける課題の達成を繰り返し行わせる」練習デザインの方が優れているのではないか、というのが現在の理論的な枠組みとなりつつあるという事実である。
同じ動作を繰り返させるのではなく、異なるシチュエーションで同じ課題の「達成」を繰り返させる。これが「反復なき反復」の基本原理となる。
学習者の技能レベルおよび動作の「機能的な変動」の関連
しかし、このような変動が必ずしも全ての学習者にとって有益なわけではない。
ベルンシュタインは、学習者は初めに冗長な自由度を「凍結」freezingさせて動作を遂行させようとするが、次第に自由度を解放・再編成し、最終的に四肢の力学的・慣性的な特性(例えばmass-spring mechanismなど)を利用できるようになっていくとする学習段階を仮定した(Magill & Anderson, 2016)。
これは実際に確認されている現象であり、特に初期段階における「凍結」の事象は野球のピッチングにおける利き手と非利き手における動作中の可動域の差として認められている(Gray et al., 2006)。

図はGray et al. (2006)による。
これの拡張的な考え方ともいえるが、動作の変動性は動作レベルとU字型の関係を持つという仮説が展開されている。(Woods et al., 2020)。
すなわち、動作レベルが低い段階は動作の「正解」の模索に伴う内部的な変動が大きくなる一方、ある程度レベルが向上すると「慣れ」が生じることで動作の内的ノイズが減少し、さらにレベルが向上すると摂動に対する外的な変動を伴う、という説である。

3段階目の変動は「機能的な変動」functional variabilityとも呼ばれ、特にオープンスキルであればGentileの学習段階の2段階目で強調される動作の「多様化」diversificationの結果であるとも考えられる。
このモデルに則って考えると、上述したようなアプローチによる練習の「変動」は初心者にとっては不適切であると考えられる。
というのも、この段階では学習者は自らの身体の動かし方に焦点を向けておりそこに多くのワーキングメモリを割いているため、そこからさらに外的な変動をかけることで処理する情報量が過負荷になってしまう可能性があると考えられるためである。
この段階はFitts & Posnerによる学習段階でいう「認知段階」cognitive stageであり、ここでは学習者はスキルの実行に際して何をすべきか、どのようにすべきかといった点に焦点が向く(Magill & Anderson, 2016)。

つまり、「反復なき反復」というコンセプトに基づく練習デザインは、ある程度動作そのものの自動化が進んだ段階で取り入れる事で初めて有効になると考えられる。
また、その際にも加える変動の要素は環境や課題に対する摂動を加える方が有意義であり、生体への制約を課すような(特定の関節の動きを制限させるなどの)変動は学習にとってマイナスであるとされる(Woods et al., 2020)。
練習におけるエラーをどう捉えるか?
練習の変動が高まれば必然的に動作のエラーは増えるが、これを指導者はどう解釈すれば良いだろうか?
Adamsの閉回路理論closed-loop theoryに基づく指導観では、正しい動きをひたすら繰り返しその感覚を「知覚痕跡」perceptual traceとして蓄えることで学習が進むと考えられた。それ故にこの理論においてはエラーは「誤った」知覚痕跡を残すことになり、学習において負の影響をもたらす、とみなされる(Magill & Anderson, 2016)。
しかし、Schmidtによるスキーマ理論schema theoryに基づく指導観、そして今回取り上げたエコロジカルダイナミクスに基づく指導観では、エラーはむしろ積極的に推奨されるものであるとされる。
とは言っても全ての学習者にとって全てのエラーが有効なわけではなく、個人の特性やエラーの質によって学習に対する効果は変化するとされる。
例えば、子どもおよび脳性麻痺などの中枢神経障害を抱える人はワーキングメモリの容量が小さく、このような人たちの運動学習においてはエラーを最小限に抑えるアプローチが有効である可能性が指摘されている(van Abswoude et al., 2015、ただしこれとは逆の可能性を指摘する研究もある(Mount et al., 2007など))。
また、Lee et al. (2016)によれば、エラーの学習効果はエラーそのものにあるわけではなく、むしろ「起こされたエラーの性質とその質にある」とされる。
すなわち、エラーには学習にとって望ましいものとそうではないものがあるということであり、それぞれ次のようなものがあるとしている。
継続的な学習過程においてガイダンスを減らしたことに起因するエラーは望ましいものである可能性がある
意思決定に関する選択肢を増やしたことに起因するエラーは望ましいものとなる
動作の制御に全く関係ない文脈で生じるエラー(視覚的な矛盾によって「気が散らされて」生じるもの)は望ましくない
実践レベルで考えれば、例えば試合などのシチュエーションで生じるであろうエラーを予期したうえで、それを誘発するような変動を加えることは有益であるかもしれないが、実際の試合中に起こるはずがないエラーを起こすような変動を加えてエラーを誘発することは望ましくない可能性がある。
まとめ
エコロジカルダイナミクスの観点に立てば、指導者は学習者を正しい方向に「導く」というよりも、学習者が主体的に正しい方向に「導かれる」ような練習や環境をデザインすることが要求される。
その意味で、指導者とは「庭師」であり「デザイナー」であると考えられる。
そのために指導者は課題やそれに伴う動作を徹底的に分析し、そしてあらゆるシチュエーションでも課題を達成できるような制約を考慮した多様な練習プログラムを考えていく必要がある。
正しい練習をデザインすることで、学習者は自らした体験を通じて「なるほど!」という感覚をつかむことができ(いわゆる「アハ体験」A-ha moment)、それこそが学習が達成された瞬間であるといえる。
……アハ体験への近づきを後押ししているのは、説明ではなく感覚である。話し合いは休憩時間に行えばよい。
人には、問題やその解決法を言語化できなくても、自然とミスを知覚して修正できることがある。この時対象者は「もうちょっとバランスをとる必要があるな」とか、「うまくできた。でも集中しなきゃ」などと思っていることだろう。
アハ体験へ近づいている時に邪魔をしてはいけない。
References
Bernstein, N. A. (1996). Dexterity and its development. (M. L. Latash & M. T. Turvey, Eds.). Lawrence Erlbaum Associates, Inc. [邦訳: 工藤和俊訳. (2003). デクステリティ: 巧みさとその発達. 金子書房.]
Bull, H. G., Atack, A. C., North, J. S., & Murphy, C. P. (2022). The effect of attentional focus instructions on performance and technique in a complex open skill. European journal of sport science, 1–10. Advance online publication. https://doi.org/10.1080/17461391.2022.2150895
Castaneda, B., & Gray, R. (2007). Effects of focus of attention on baseball batting performance in players of differing skill levels. Journal of sport & exercise psychology, 29(1), 60–77. https://doi.org/10.1123/jsep.29.1.60
Chua, L. K., Jimenez-Diaz, J., Lewthwaite, R., Kim, T., & Wulf, G. (2021). Superiority of external attentional focus for motor performance and learning: Systematic reviews and meta-analyses. Psychological bulletin, 147(6), 618–645. https://doi.org/10.1037/bul0000335
Davids, K. (2010). The constraints-based approach to motor leraning: implications for a non-linear pedagogy in sport and physical education. In Renshaw, I., Davids, K., Savelsbergh, G. J. P., eds. Motor Learning in Practice: A constraints-led approach. Roundledge.
Gray, S., Watts, S., Debicki, D., & Hore, J. (2006). Comparison of kinematics in skilled and unskilled arms of the same recreational baseball players. Journal of sports sciences, 24(11), 1183–1194. https://doi.org/10.1080/02640410500497584
Herrebrøden H. (2023). Motor Performers Need Task-relevant Information: Proposing an Alternative Mechanism for the Attentional Focus Effect. Journal of motor behavior, 55(1), 125–134. https://doi.org/10.1080/00222895.2022.2122920
Kelso J, A. (1995). Dynamic Patterns : The Self-organization of Brain and Behavior. MIT Press.
Kugler, P. N., Scott Kelso, J. A., & Turvey, M. T. (1980). 1 on the concept of coordinative structures as dissipative structures: I. Theoretical Lines Of Convergence. Advances in Psychology, 3–47. https://doi.org/10.1016/s0166-4115(08)61936-6
Lee, T. D., Eliasz, K. L., Gonzalez, D., Alguire, K., Ding, K., & Dhaliwal, C. (2016). On the Role of Error in Motor Learning. Journal of motor behavior, 48(2), 99–115. https://doi.org/10.1080/00222895.2015.1046545
Magill, R. A, Anderson, D. I. (2016). Motor learning and control : concepts and applications. 11st edition. McGraw-Hill.
Mount, J., Pierce, S. R., Parker, J., DiEgidio, R., Woessner, R., & Spiegel, L. (2007). Trial and error versus errorless learning of functional skills in patients with acute stroke. NeuroRehabilitation, 22(2), 123–132.
Newell K,M., Ranganathan, R. (2010). Instructions as constraints in motor skill acquisition. In Renshaw, I., Davids, K., Savelsbergh, G. J. P., eds. Motor Learning in Practice: A constraints-led approach. Roundledge.
Profeta, V. L. S., & Turvey, M. T. (2018). Bernstein's levels of movement construction: A contemporary perspective. Human movement science, 57, 111–133. https://doi.org/10.1016/j.humov.2017.11.013
Ranganathan, R., Lee, M. H., & Newell, K. M. (2020). Repetition Without Repetition: Challenges in Understanding Behavioral Flexibility in Motor Skill. Frontiers in psychology, 11, 2018. https://doi.org/10.3389/fpsyg.2020.02018
Schöllhorn, W. I., Hegen, P., & Davids, K. (2012). The nonlinear nature of learning—A differential learning approach. The Open Sports Sciences Journal, 5 (1), 100–112.
van Abswoude, F., Santos-Vieira, B., van der Kamp, J., & Steenbergen, B. (2015). The influence of errors during practice on motor learning in young individuals with cerebral palsy. Research in developmental disabilities, 45-46, 353–364. https://doi.org/10.1016/j.ridd.2015.08.008
Woods, C. T., McKeown, I., Rothwell, M., Araújo, D., Robertson, S., & Davids, K. (2020). Sport Practitioners as Sport Ecology Designers: How Ecological Dynamics Has Progressively Changed Perceptions of Skill "Acquisition" in the Sporting Habitat. Frontiers in psychology, 11, 654. https://doi.org/10.3389/fpsyg.2020.00654
この記事が気に入ったらサポートをしてみませんか?