
運動制御におけるシステム理論

二重カッコ 《》←これがついてる項は小賢しい話だったり補足的な話だったりするので読まなくても良いかもです
この記事にはおまけがあります↓
人間の運動の性質について
運動の制御を問題とするシステム理論を明らかにするためには、そもそも「人間の運動movementとはどのようなものなのか?」という問題を取り上げなければならない。
より簡略化して言うのであれば、この疑問は次のように言い換えることができる。
我々の運動はどのような要因によって生じるのか?そしてそれらはどのように影響し合っているのか?
人間の運動は、①生体individual、②課題task、③環境environmentの3要素が相互に関係し合うことで構成されていると考えられている(Shumway-Cook & Woollacott, 2017)。
*以下は全て同著を参考としている。
運動の要素①:生体individual
運動を起こす主体、すなわち我々の身体それ自身を指す。
運動要素としての生体は、さらに3つの要素から成り立つ。
動作・行為システムmotor/action systems
神経筋的・生体力学的に身体がどのような運動を起こすか
すなわち神経系における遠心路に関する系感覚・知覚システムsensory/perceptual systems
運動制御のために必要な外界の情報を捉えるシステム
すなわち神経系における求心路に関する系認知システムcognitive systems
注意や意図、計画、問題解決、動機づけ、感情的側面などに関するシステム
※特に動作・行為システムに関して運動制御を明らかにしようとしたときに、「人は冗長な自由度をどのように制御しているのか?」という問題である(Bernsteinの自由度問題)。
これに関しては「Appendix~」で概観するため、ここでは割愛する。
ところで、我々の随意的な運動は、およそ全て何らかの意図を持って起こされているはずである。
(水を飲む「ために」コップを手に取る、打たれづらくする「ために」低めに投げる、etc…)
すなわち、身体運動における「意図」「特定の目標」は、我々の運動が生じる前件として存在している。これは動作を指導する上でおそらく最も重要な視点になる。
Motor control includes perception and action systems that are organized to achieve specific goals or intents.
(運動制御は、特定の目標や意図を達成するために組織化された知覚・行動のシステムを含んでいる。)
運動の要素②:課題task
運動課題は様々なものがあり、それによって神経機構の振る舞いは変化する。
運動課題の変数としては次の4つが考慮される。
運動課題の連続性(Discrete vs. Continuous)
動作の始点と終点が明確であるとき、その課題は不連続的discreteであるとされる(ボールを蹴る、椅子から立ち上がるなど)。
逆に、水泳におけるストロークや歩行など、動作の始点と終点が明確でない場合、その課題は連続的continuousであるとされる。閉鎖型・開放型(closed vs. open)
いわゆる「クローズドスキル」「オープンスキル」といった分類を指す。
テニスのラリーなどは相手の打ち方によって自分の「出方」も変わる運動課題であり、このような生体が予測不可能な状況に置かれる運動課題を「開放型」と呼ぶ。
逆に陸上の100m走のように、運動課題を行うシチュエーションがほとんど変わらない運動課題を「閉鎖型」と呼ぶ。支持基底面の変化(stability vs. mobility)
運動課題の遂行中に支持基底面が変化するかしないかの分類。
例えば両足で椅子から立ち上がる場合は支持基底面自体は変化しないため安定型stabilityであり、歩行などは支持基底面が変化するため可動型mobilityの運動課題である。上肢の動きの有無(manipulation vs. non-)
読んで字なので割愛
これらを統合すると、運動課題の性質で考慮すべき要素は次の3点になる。
①支持基底面の変化はあるか?
②運動課題における姿勢制御の様態は?
③上肢の働きは?
運動の要素③:環境environment
その環境が動作そのものの形成に関与するもの(regulatory feature)なのか、あるいはそうではないのか(non-regulatory -)で区別される。
e.g. 歩行における環境
雪が固まって滑りやすい道を歩くときには、我々の歩行パターンは変化する。
(個人的な体感として、ふくらはぎを緊張させて足首を少し固めるように歩いている気がする…?)
このとき、「雪が固まっている道」という環境は我々の歩行パターンに影響を与えているため、regulatory featureであると考えられる。

一方で、前を歩く人の話し声などは直接歩行パターンに影響を与えないため、non-leguratory featureである。
しかし、non-leguratory featureが運動制御に全く影響を与えないかというとそうではない。
例えば試合での観客のヤジは動作そのものを形成する要素となるわけではないが、少なくともパフォーマンスに何らかの影響はもたらすはずである。
要素間の相互作用
運動に関する大要素、およびそれらを構成する小要素をまとめると次のようになる。

実際は、諸要素間でも連携しつつ運動が構築されていく。
先に挙げた雪が固まって凍っている道を歩くという運動を考えてみると、おおよそ次のようなプロセスを経て運動が行われると考えられる(各プロセスの厳密さについてはひとまず置いておく)。
路面からの光の反射を感覚器(眼)が受容、「道が凍っている」と知覚する
その知覚情報が「滑らないように(歩こう)」という意図を喚起
その意図を達成するために、運動系の中枢がそれぞれの運動器へと指令を出す
歩行パターンが調整され、滑らないように歩くことが達成される
このように、我々の運動は課題の性質を理解した上で環境を知覚し、それにアジャストするように意図が構築されていく。
運動制御系におけるシステム理論:動的システム理論の概要
システム理論以前の運動制御の理論は、先の運動の性質について生体と課題しか考慮されていないという問題がある。
例えばSherringtonの反射理論では骨格筋-神経系の関連性を考慮しており、また階層理論においては神経系の階層構造を、運動プログラム理論では課題に対する中枢の機能を考慮している。
(それぞれの理論についての詳細な説明は割愛)
このように、これらの理論は中枢神経系と末梢の骨格筋の関係しか考慮されていない。すなわち身体の外=環境については度外視されている。
しかし、ベルタランフィ(Ludwig von Bertalanffy, 1901-1972)が自著『一般システム理論』(原著“General System Theory”) にて示しているように、生体は外界に向けて「開かれて」おり、それゆえ常に環境との相互作用によって自己編成をしている。
すなわち、人間の運動は中枢の振る舞いでのみ規定されるわけではなく、もっと広い様々な諸要素の相互作用で決定される。
この諸要素を一つの系=システムとして、運動の制御のあり方を数理学的に考える理論が運動制御系におけるシステム理論(動的(ダイナミック)システム理論とも)である。
以下、一々「運動制御系におけるシステム理論」は「動的システム理論」として表記する(長すぎて面倒なので)。
動的システム理論のキーコンセプト①:自己組織性self-organization
自己組織性とは何か?
よくある例として、雪の結晶は常に六角板状に形成されるが、これは何らかの外力によるものではなく、分子間で自律的に生じるものであるとされる。

このような、あるシステムが外部からの制御無しに自律的に秩序を形成・維持する性質を自己組織性self-organizationと呼ぶ。
特に非線形的なシステムにおいては、「ゆらぎ」=ノイズを通して新たな秩序が形成される性質を指す(Prigogine, 1976)。
身体を一つの系=システムとして捉えるのであれば、身体においてもこのような自己組織性は認められるのではないか?(Magill. & Anderson., 2016)
身体における自己組織性の例:両指の協調運動における相転移の観察
*このトピックは動的システム理論における様々重要なコンセプトを反映しているため、以降も頻出するため注意されたい。
身体の協調運動における自己組織化の例として、Kelso(1984)による両指の協調運動の例がある。
両手の示指(人差し指)を前に出し、左→右→左→右→……と繰り返す運動をゆっくりと行ってみる。このような運動は逆位相パターンと呼ばれ、身体にとっては非秩序的な運動である*。
*指を振る動きの見かけ上の運動方向は左右で同じになるが、実際は左指が右に振れる際には示指外転が生じており、右指が右に振れる際には示指内転が生じているため
次にその運動のスピードを少しずつ速くする。
初めは同じ方向に指をふることができるはずだが、スピードを速くしていく過程でいつの間にか左右対称の運動になっているはずである。
このとき、左右の示指は同じ運動(内転→外転→内転→……)をするため、この運動パターンを同位相パターンと呼ぶ。

図はMechsner et al. (2001)による。
つまり、速度を上げていく過程で身体はbパターンの運動を非秩序的な運動として、aパターンの「秩序的な」運動へと自律的に相転移させている。
《Haken-Kelso-Bunz model(HKBモデル)》
上述した両指の協調運動を定量的なモデルとして数式化しているのがHaken-Kelso-Bunz model(HKBモデル)と呼ばれるものである(Haken et al., 1985)。
HKBモデルでは、周期運動における二指間の位相差φを変数とする次の数式が提案される。
V(φ) = -a cosφ -b cos2φ (V; potential function)
この数式について、b/aの値(=運動速度)を変化させた際のエネルギーランドスケープの変化を示したのが下のグラフ群となる。

図はHaken et al. (1985)による。
厳密な導出などは原著を参照していただくとして、HKBモデルは次のような点で大きな影響を与えたとされる(佐藤, 2003)。
自己組織化現象を扱う物理・生物学的現象の理論をベースにして、複雑な運動を行うシステム全体の挙動の記述に関するアイデアを提示したこと
身体運動を、自己組織化現象のみならずその他の物理・生物学的現象における理論と共通の言語で説明出来る可能性を提案したこと
(この意味で動的システム理論は、環境と生体の関係に重きを置く生態学的理論と密接に結びつく理論であると考えられる)
指摘されている通り、このHKBモデルはこれ以降に詳述するような、動的システム理論における様々な重要なコンセプトを反映している。
動的システム理論のキーコンセプト②:非線形性nonlinear behavior
入力に対する出力が直線的な関係にプロットされないとき、そのシステムは非線形的であるとする。
物理現象で言えば、温度の上昇から沸騰までの過程における水分子の振る舞いは非線形的な振る舞いをするとされる。
《非線形性の例:馬の歩法》
馬の歩法は、対称歩法である常歩(なみあし;walk)、速歩(はやあし;trot)と非対称歩法である駈歩(かけあし;canter)、襲歩(しゅうほ;gallop)に分けられるとされる。
対称歩法から非対称歩法への転換は速度の変化に伴って生じるが、その時の転換は段階的に生じるわけではなくある速度に達した時点で突然変化する。

図はCollins & Stewart (1993)による。
上の動画では、1:37あたりで肢の動きが急激に変化していることがわかる。
この変化は速度に応じて線形的/段階的に変化していくものではなく、ある速度から突然異なるフェーズへと変化するパターン(相転移)の様相を呈している。
ヒトの歩行→走行における相転移
Shapiro et al. (1981)は、一般化運動プログラム(GMP;generalized motor program)という観点から歩行と走行における各周期の相対的な持続時間に関する研究であるが、これは動的システム理論という観点からも興味深い示唆を与えてくれる。
この研究では、
①歩行・走行においては速度が変わってもロコモーションにおける各相の相対時間は変化しないものの、
②歩行と走行の間では各相の相対時間が大きく異なる
ことが示されている。
これはすなわち歩行と走行においてそれぞれ異なるGMPを有することを示唆している。
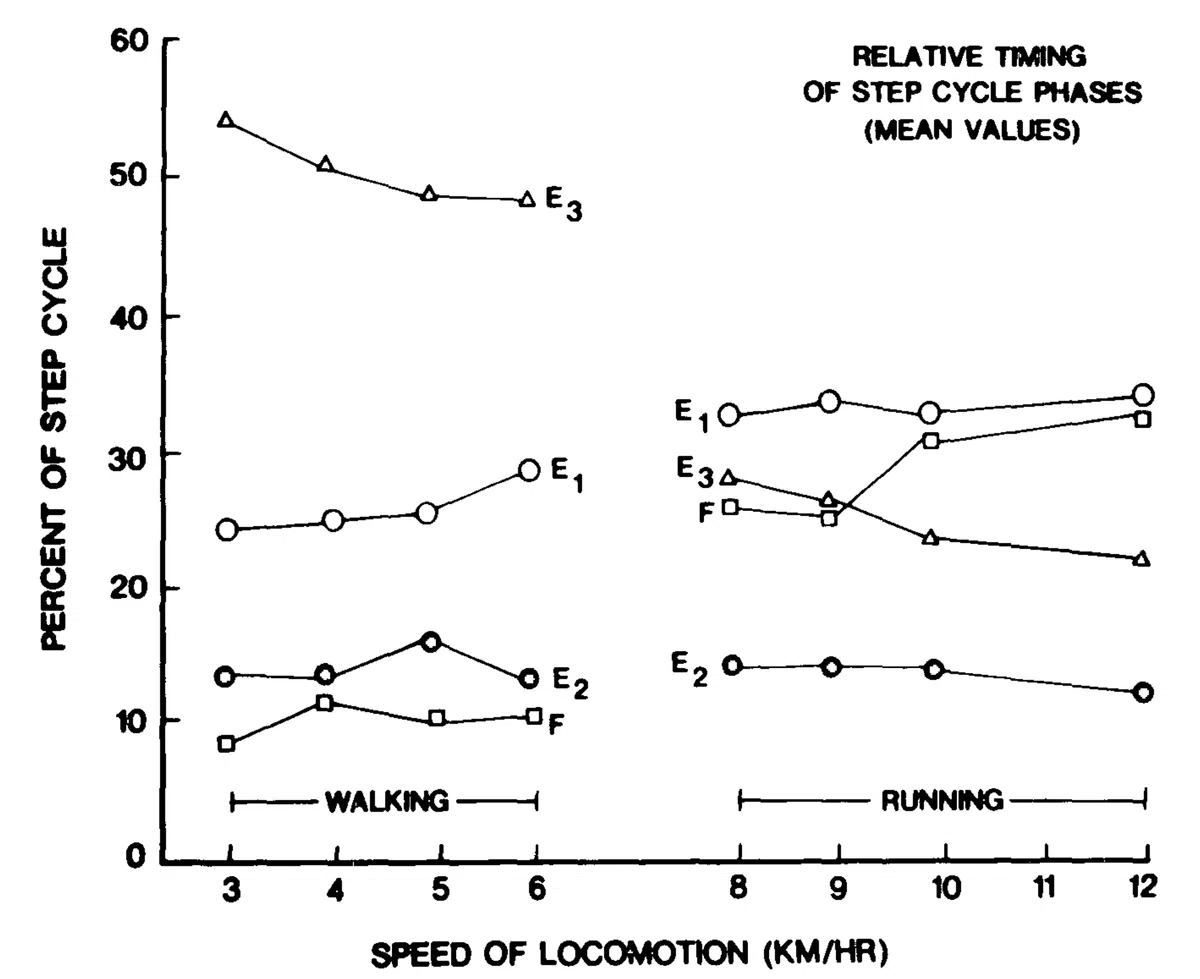
歩行においてはE3相が最も長くF相が最も短いが、走行においてはE1相が最も長くE2相が最も短くなり、各相の相対時間は大きく変化していることが明らかになる。
一方、歩行間・走行間においては速度を変化させたとしても各相の相対時間は変化していない。
図はShapiro et al. (1981)による。
歩行と走行におけるGMPの切り替えは照明のスイッチのように切り替わり、速度の上昇に伴って線形的に生じるものではない。
この意味で人間における速度とロコモーションの関係は非線形的な関係であると言える。
また、自己組織性の項で示した両指の協調運動も、非線形的な振る舞いを呈していることがわかる。
動的システム理論のキーコンセプト③:安定性/アトラクターattractor
システムにおける安定性とは何か?
動的システム理論において中心的な位置を占めている安定性は、「システムの動作の定常状態」と定義される(Magill. & Anderson., 2016)。
ここでは、安定と不変(=システムの堅固さ)は異なる点に注意する必要がある。
すなわち、システムに外的要因による「ゆらぎ」が生じても自律的(=自己組織的)にシステムが定常状態に戻されたとき、そのシステムは「安定している」と考えることができる。
先の両指の協調運動からも、この安定性を見出すことができる。
速度がゆっくりの間は逆位相パターンでシステムは安定しているが、速度が上昇するにつれて逆位相パターンは不安定なものになる。
そこで身体というシステムは逆位相パターンから同位相パターンへと挙動を相転移させることで、再び定常状態へと戻す。
人間の協調運動においては、このようなシステムの安定状態を指してアトラクターattractorという用語が定義される。

先の両指の協調運動では、初めは逆位相パターン(=位相差180°)が身体にとって安定する状態=アトラクターであったが、速度が上昇するにつれてエネルギーランドスケープが変化し、同位相パターン(=位相差0°)がアトラクターとなる。システムはアトラクターへと引きつけられるようにその様態を変化させる。
図はKelso (1995)による。
アトラクターは人間の協調運動における好ましいかつ安定した状態であるとともに、エネルギー効率が最適化されている状態でもある(Ibid.)。

仮に同じ速度だとしても、ジョギングよりも早歩きの方が体感的に疲れるという経験はあるだろう。アトラクターは単にシステムが安定している状態というだけでなくエネルギー効率も良い状態であることが、この事実からも伺うことが出来る。
《ヒトの姿勢制御:外乱状態からアトラクターへの収束》
外乱に対する姿勢制御パターンとして足関節戦略ankle strategyと股関節戦略hip strategyがあることは有名である(Horak & Nashner, 1986)。

中村ら(2003)では、外乱が大きいor支持基底が足底より短いとき、股関節戦略が用いられるとされている。
図はHorak & Nashner (1986)による。
この2つの戦略の切り替えは、外乱に対する力学的要求によって決定すると考えられている(Bardy et al., 2002)。
しかしBardy et al. (2002)によれば、力学的要求と姿勢制御のパターンには一対一の関係はないため(同じ力学的要求が複数の制御パターンを起こすこともあれば、異なる力学的要求が同じ制御パターンを起こすこともある)、姿勢制御のパターンとその変化は、単にニュートン力学だけに根ざしたものではない。
足関節による制御と股関節による制御は同期的に生じるものであり、この組み合わせによる制御パターンはそれぞれ同位相アトラクター(in-phase;股関節と足関節が同時に屈曲するパターン)と逆位相アトラクター(anti-phase;股関節と足関節の矢状面の運動が逆になるパターン)がある。
この2相は非線形的に切り替わるとともに(Bardy et al., 2002)、共存して生じることもある(Creath et al., 2005、この研究に基づくreviewとしてBardy et al. (2007)がある)。
このような制御パターンは身体特性やサーフェス、課題特性など様々な要因によって決定される(Bardy et al., 2007)。
おまけ:動作指導にどう活かすか?
長くなりすぎたので「Appendix: Bernsteinの思想と運動学習への示唆」で書きます
後記
論文で数式出過ぎてちいかわみたいに泣いてた
References
Bardy BG, Oullier O, Bootsma RJ, Stoffregen TA. Dynamics of human postural transitions. J Exp Psychol Hum Percept Perform. 2002;28(3):499-514.
Bardy BG, Oullier O, Lagarde J, Stoffregen TA. On perturbation and pattern coexistence in postural coordination dynamics. J Mot Behav. 2007;39(4):326-336. doi:10.3200/JMBR.39.4.326-336
Collins JJ, Stewart IN. Coupled Nonlinear Oscillators and the Symmetries of Animal Gaits. J Nonlinear Sci. 1993;3:349-392. doi:10.1007/BF02429870
Creath R, Kiemel T, Horak F, Peterka R, Jeka J. A unified view of quiet and perturbed stance: simultaneous co-existing excitable modes. Neurosci Lett. 2005;377(2):75-80. doi:10.1016/j.neulet.2004.11.071
Haken H, Kelso JA, Bunz H. A theoretical model of phase transitions in human hand movements. Biol Cybern. 1985;51(5):347-356. doi:10.1007/BF00336922
Horak FB, Nashner LM. Central programming of postural movements: adaptation to altered support-surface configurations. J Neurophysiol. 1986;55(6):1369-1381. doi:10.1152/jn.1986.55.6.1369
Kelso JA. Phase transitions and critical behavior in human bimanual coordination. Am J Physiol. 1984;246(6 Pt 2):R1000-R1004. doi:10.1152/ajpregu.1984.246.6.R1000
Kelso JA. Dynamic Patterns : The Self-organization of Brain and Behavior. MIT Press;1995
Magill RA, Anderson DI. Motor learning and control : concepts and applications. 11th ed. McGraw-Hill;2016
Mechsner F, Kerzel D, Knoblich G, Prinz W. Perceptual basis of bimanual coordination. Nature. 2001;414(6859):69-73. doi:10.1038/35102060
Prigogine I. Evolution and Consciousness: Human Systems in Transition. Addison-Wesley;1976
Shapiro DC, Zernicke RF, Gregor RJ. Evidence for generalized motor programs using gait pattern anShapiroalysis. J Mot Behav. 1981;13(1):33-47. doi:10.1080/00222895.1981.10735235
Shumway-Cook A, Woollacott MH. Motor Control; Translating Research Into Clinical Practice. 5th ed. Wolters Kluwer;2017
佐藤善治. スポーツ運動・動作の練習過程に関する実験研究への覚え書き. 立命館経済学. 2003;52(5):18-38.
中村隆一, 齋藤宏, 長崎浩. 基礎運動学 第6版. 医歯薬出版;2003
この記事が気に入ったらサポートをしてみませんか?