第9回:センサレスモビリティの自律走行を可能にした”3D統合モデル”とは?

コモングラウンド・リビングラボ(以下、CGLL)のパートナーの活動や取り組みを紹介するインタビュー。第9回目は国土交通省が主導する「Project PLATEAU/プロジェクト プラトー」(以下、プラトー)の一環として、竹中工務店、日立製作所、gluonの3社によるチームがCGLLの敷地内で実施した実証実験、「モビリティ運行を見据えた都市・建物デジタルツインの構築」について、竹中工務店情報エンジニアリング本部の小林哲雄氏と日立製作所研究開発グループの鈴木真太郎氏に話をお聞きしました。
# 異なる3つの3Dモデルを統合してパーソナルモビリティを自律走行させる
国土交通省が2020年度から開始したプラトーは、都市の3Dモデルを整備してオープンデータ化し、誰もが自由に都市のデータを活用できるようにすることを目指しています。現在、約100都市のモデルが整備されており、2027年度までに約500都市に拡大することが予定されています。データは拡張性と連携性を高めた形で公開されており、都市計画や災害シミュレーション、映画やゲームなどのコンテンツ、まち歩きのアプリなど幅広く活用されています。

ーー実証実験の内容についてくわしく教えてください。
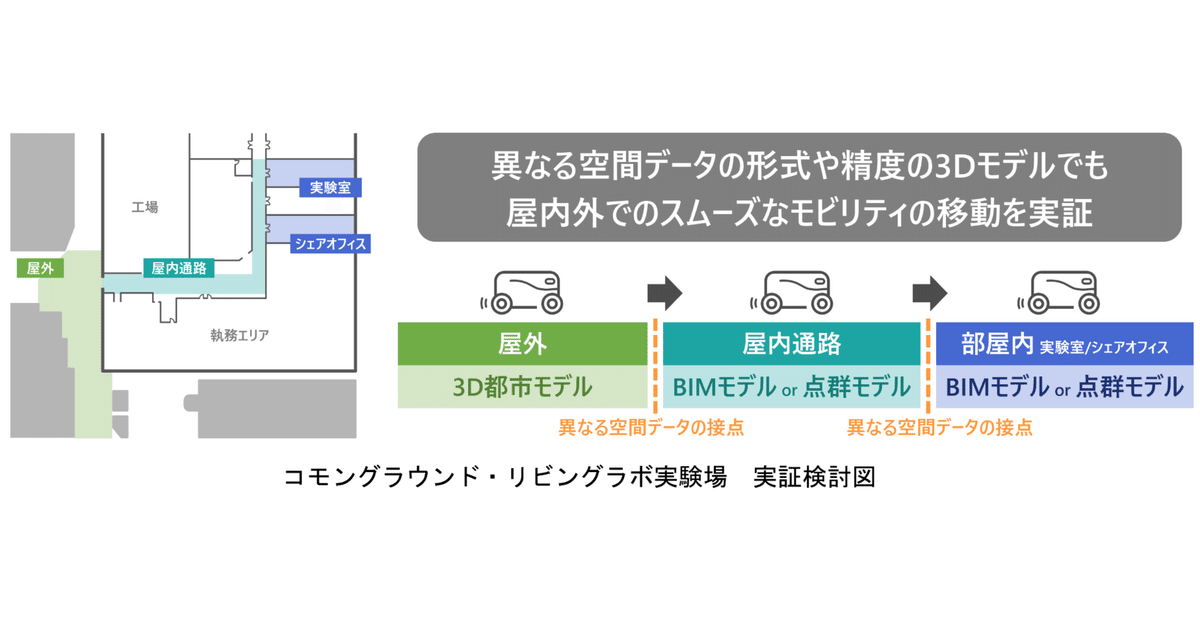
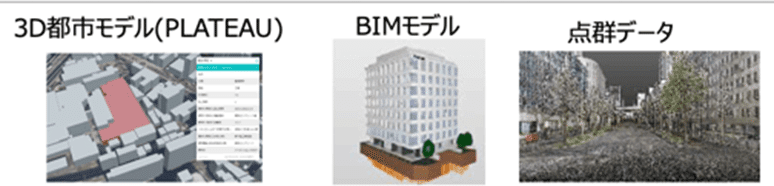
鈴木:今回CGLLで行われた実証実験は、屋外エリアはプラトーの3D都市モデル、屋内は、建物の3DモデルであるBIM(Building Information Modeling/ビルディング インフォメーション モデリング)モデル、および3Dレーザースキャナーで撮影した点群データという異なる3つのデータを組み合わせて1つのデジタルツインを構築し、パーソナルモビリティを目的地まで自律走行させることができるかを確認するというものです。
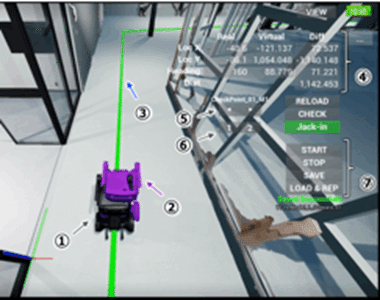
使用したのはCGLLの設備の一つとして提供されている車椅子型のパーソナルモビリティで、カメラやLiDARのような周囲を認識するセンサは搭載していませんが、デジタルツインとの連携の実験が行えるよう、外部から遠隔操作できるような改造を施してあります。通常、モビリティを自律走行させる場合、対象エリアを事前に走らせてルートマップを作成したり、本体にカメラやセンサー、LiDARなどを搭載して周囲をセンシングしたり、本体の機能を高度化する必要がありました。今回は使用したパーソナルモビリティはそうした機能を搭載しておらず、代わりに建物(環境)側に設置したLiDARで人などの障害物やモビリティ自身の位置を検知し、モビリティはデジタルツインからの走行指示データのみに基づいて走行させ、目的地へたどり着けるかを検証しました。

私はロボットやパーソナルモビリティを走らせるアプリの開発に携わっていて、以前に何度かCGLL内でデモを行っていました。今回はそのアプリを拡張して使用しましたが、プラトー、BIMモデル、点群データという異なる空間データをつなぎあわせるという未知の部分にトライしたのが大きなポイントだと言えます。
小林:当社はgluonさんと一緒にデジタルツインの作成を担当しました。BIMモデルはCGLLがある中西金属工業さん(以下、NKC)から提供いただき、点群データはクモノスコーポレーションさんがCGLLにオープンデータとして提供していただいているものを使用しました。(参考記事:第4回:バーチャルとリアルを繋ぐ未来の世界に必要なソフトウェアとはhttps://note.com/cgll_osaka/n/nc6d54b536934)
デジタルデータの統合は簡単だと思われますが、異なる条件のデータをつなぎあわせるというのは未知の挑戦で、データの取得方法や作り方が違うとエリアによって精度が違ったり、特性が違ったり、実際やってみると細かいレベルで整合性が取れない部分が出てきます。また、BIMモデルは一見するときれいで正しいように見えるのですが、作られたのは建築当時の設計データで、実際に建てられた時は変更されている場合もあります。そうした問題がパーソナルモビリティの走行にどこまで影響するのかは、それこそ実際に動かしてみないとわからないので、CGLLをフィールドに検証したというわけです。

# デジタルツインでセンサレスモビリティを目的地へ誘導することに成功
ーー データの統合は上手くできたのでしょうか?
鈴木:数キロメートル四方のような広大な屋外の空間モデルは、ファイルサイズが非常に大きく、扱いにくいものです。そうならないように、竹中さん・gluonさんには、データに必要な精度と範囲をハンドリングしつつ、屋内外を統合した3Dモデルを作成して頂きました。おかげで、CGLLのプラットフォーム上に取り込んで経路探索をして、スマートモビリティを動かすところまで比較的スムーズにできました。プラトーとBIMモデルを点群データで繋げば上手くいくことがわかり、そのノウハウが得られたのは大きな成果だと思っています。

小林:データの統合では別の観点でも気づきがありました。gluonの豊田啓介さんが提唱されているコモングラウンドは、静的な空間データにセンサーなどを使って収集した動的なデータを重ねることで、現実と瓜二つのいわゆるデジタルツインを作りだせます。その場合、センシングした動的データをモビリティの走行ルートにどのタイミングで反映するのかが大事で、今回は走行ルート上にたまたま車が駐車されていて、こういうケースを想定してリアルタイム連携や、リアルとバーチャルのシームレスな連携を実現しなければいけないというのがわかりました。
鈴木:静的/動的という言葉が出ましたが、必ずしもどちらか一方に分類できるものではなく、車も同じ場所に長時間駐車されれば静的に近いですし、家具は静的に見えるけれどたまに動かすので動的とも言えます。だからといって、大部分を動的として扱って、毎回最新のリアルのデータを収集しなおすのは非効率です。大規模なリアル・バーチャル空間が連動する状態を,効率的に維持管理していく方法は、これから整理していかないといけないところなのかもしれません。
当社でロボットなどを専門に研究している人に話を聞くと、かっこいいガラス張りの建物はロボットにとって大敵で、カメラやセンサーで検知することが難しく、気をつけないとぶつかってしまう。だからリアルでセンシングする代わりに、コモングラウンドにある3Dモデルで制御ができるようになれば、そういった問題も解決できます。
# モビリティやロボットに配慮した設計提案ができるようになる
ーー 今回の実証実験からどのような結果が得られましたか?
鈴木:走行にはどのようなデータが必要かというような決まった基準ができたというより、ユースケースに合わせてどうすればいいのかが見えてきたと思っています。例えば今回はルート上にたまたま車が駐車されていたというアクシデントがあったのですが、最初から駐車ができそうなエリアは走行しないようにするとか、LiDARでリアルタイムに周囲をセンシングして避けるとか、回避する方法はいくつか考えられます。結果として、立ち入り禁止領域を作って対応しましたが、そうした変更もデジタルツインならすぐに対応できることがわかりました。

小林:空間データの情報は粒度が高いほど良いのですが、コストも扱う時間もかかります。その点は将来的にはクリアされるでしょうが、今の段階では点群データはミリ単位で測れるけどわざわざ測りに行かなければいけないので、そこはプラトーのデータを使うとか、その場合に何に気をつければデータの数と種類を減らせるとか、取り組むべき課題が見えてきた気がしています。
鈴木:結論としてCGLLでは、プラトーの3D都市モデル、BIMモデル、点群データという3つの全く異なるデータ形式をすべて使ってモビリティの自律走行ができたというのは大きな実績になりました。ルートの幅は最狭部で2メートルほどでしたが、3Dモデルにどの程度の精度があれば、センサーレスモビリティが壁にぶつからず走れるかということが確認できましたし、モビリティ側の制御誤差がどれくらいであれば運用上の問題はないというところも確認できました。
ーー実際のビジネスにも活用できそうですか?
小林:そうですね。当社で今回の結果を参照するとすれば、モビリティや搬送ロボットを運用する際に壁までの距離や方向をどう測るか、それよりも目印となるマーカーを使う方が制御データが増えるので手段としては使いやすいとか、ガイドラインとしてある程度使えるものにはなりそうです。ゼネコンの立場から意匠を提案する場合、お客様にはいろんな材質を使ってかっこよく作りましょうと言いますが、建物の中でロボットを走らせるのであれば床を滑りにくい材質にする方がいいとか、新しい考え方につながるかもしれません。人に対する環境やデザインの配慮はありますが、ロボットやモビリティに対してはまだないと思うので、そういったところがアピールポイントになれば面白いですね。
鈴木:当社内でも、コモングラウンドがめざすものとよく似た将来像に向けた研究開発を推進しているのですが(https://www.hitachi.co.jp/rd/sc/story/cgll1/index.html)、
よく挙がる課題の一つとして、3Dモデルをどうやって用意するのかというのがありました。今回の実証実験では、プラトーで提供される3D都市モデルを使ってモビリティ制御ができることが確認できました。また国交省に対して、これからこういうサービスをやりたいからこういうデータを整備してほしい、といった3D都市モデルの改善提案をする機会にもなったと思います。
# 陸上から空へコモングラウンド活用のアイデアはさらに広がる
ーー 実証実験フィールドとしてCGLLを活用できたメリットはありましたか?
小林:今回は同じチームでもう一つ、大阪メトロの御堂筋線本町駅周辺で、同じくデジタルツインを利用したARナビアプリの検証をしましたが、一般の方が多く利用する場所だったので十分な配慮が必要でしたし、時間的な制約もありました。その点、CGLLは使い慣れた場所で設備もある程度整っていて、その場でデータを修正するといった対応もできました。また、検証は平日に行われたのでNKCの社員の方々が見学に来られたり、工場も普通に動いていて、車が行き来したり、駐車されていたり、我々も協力してくださったNKCさんも大変なところはありましたが、結果的により普通に近い条件で実証実験ができて、得られるものは大きかったと思っています。
鈴木:実証実験の詳細は、プラトーの報告書が公開されているのでそちらを参照していただくとして、CGLLのパートナーのみなさんには今回作成したモデルを利用いただけるようにしますので、いろいろ面白い使い方ができるんじゃないかと思っています。活用のアイデアを考えるところでも協力しますので、ぜひ一緒にCGLLで新しいことに取り組んでいきたいですね。

ーー 今後、CGLLでやってみたい実証実験はありますか?
小林: CGLLにあるいろんな機能のロボットをコモングラウンドの中とリアルをつないで、本当に人の代わりになるようにするのは面白そうですし、今回は陸上でしたが、今後はドローンみたいな空中を3次元で移動するシステムをイメージしてみるというのもありかもしれません。
鈴木:それは面白そうですね。例えば荷物を運ぶ時のラストワンマイルとして、駅からビルの合間を縫ってドローンが飛んできて、目的地の建物まで届けてくれるとか、そういったイメージを具現化するのにCGLLであればVRを使って体験できるようになるとか、いろいろアイデアは広がりそうですね。
プロフィール:
竹中工務店 情報エンジニアリング本部 副本部長 小林哲雄
日立製作所 研究開発グループ デジタルサービスプラットフォームイノベーションセンタ 研究員 鈴木真太郎